はじめに
本ドキュメントは、MIRS1403の解体報告書である。本ドキュメントの目的は以下の通りである。1.昨年度MIRS MG3Sで制作されたMIRS1403機に搭載されている部品と、今年度製作予定であるMIRS MG3G標準機に必要な部品を比較し、その過不足をまとめる。
2.昨年度のMIRS MG3S標準機と今回解体を行うMIRS1403との相違点を比較し、それをまとめる。
目的1については、解体報告書内で、昨年度と今年度の部品の比較を各工程ごとに文章や表で整理し、MIRS MG3S標準機とMIRS1403制作機体の比較結果を各項にて記述した。
目的2については、MIRS MG3S標準機に対してMIRS1403が制作したオリジナル機のメリットとして、音楽再生システムやLEDといった部品を用いることによるエンターテイメント性の向上や、高精度の超音波センサの搭載による短距離の測定が可能であることなどを挙げている。
また、デメリットとして音楽再生システムなどを新規に搭載したことによって配線が複雑になり、それによる断線が発生で、動作が不安定になる可能性を挙げている。
今、ここで記述した事以外にも多数のメリット・デメリットはあるが、本ドキュメント内にて写真と併せて後述していく。
それぞれの記載場所については、目次の通りである。
まず、今回のMIRS1403解体は、今年のMIRS MG3G標準機の制作を行うにあたって昨年のMIRS1403の機体と部品を比較し、過不足を知り今後どのように制作を進めていくかの方針を得るために行われる。
今回解体を行うMIRS1403はG-SHOCK!!というチームコンセプトの下で製作され、MIRS MG3Sの標準機と比べてデザイン性・エンターテイメント性に優れている事から、MIRSの目的の一つである観客を魅了する事を達成している機体である。
今回この機体を選択した理由を以下に示す。
- アルミタイヤ・LEDテープ・モーター制御ボード・Webカメラ・超音波センサー等、今年の制作に活用できる部品が多い。
- MIRS競技会にて、特別賞を受賞した機体であり、評価された点だけでなく加工法や組み立て方について多くのヒントを得る事が出来る。
関連文書
MIRS1403 システム提案書
今回のMIRS1403の機体解体は、役割を分けて行った。
それぞれの役割、人員をTable 1に示す。
| 役割 | 人員 |
|---|---|
| 機体解体 | 鍵山、望月、勝又 |
| 写真撮影 | 佐野、三室 |
| 手順確認 | 原、川崎 |
| ドキュメント作成 | 志村 |
| 文章校閲 | 水溜 |
| 部品確認 | 大石 |
全体図
MIRS1404の機体の全体図、正面図、側面図を以下に示す。この機体は本来モーニングスターが取り付けられていたが、解体作業を行うときには危険であるために初めから取り外されていた。そのため今回の解体報告書にはモーニングスターは含まない。
基板が側面に取り付けられているため、それぞれのコードが絡まっており、解体がし辛い状況となっている。
以下のFig.1 Fig.2 Fig.3にそれぞれの位置から見た機体を示す。

Fig.1 正面図

Fig.2 側面図

Fig.3 上面図
解体手順
今回は機体の構造上、外側に露出している部品から順に取り外し解体を行っていく。周辺部品の取り外し
機体の上部金具の取り外し
まず始めに機体上部のモーニングスター柄と呼ばれる金具を取り外した。
これらはそれぞれが2本のねじで留められていた。これにより巻かれていたケーブルを取り外しやすくなり、解体を行いやすくなった。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2について、メリットとしてはモーニングスターをより敵側に近づける事が出来る。デメリットとしてはケーブルが絡まりやすく、機体内の整備ができない点がある。 Fig.4 Fig.5に取り外し後の機体とモーニングスター柄を示す。

Fig.4 取り外し後の機体

Fig.5 モーニングスター柄
機体下部バンパ、蝶番の取り外し
次に機体下部バンパーの取り外しを行った。これは、それぞれが二本のねじで留められており、標準機と比べると、プラスチック製となっていた。
機体の重量が軽くなり、より動作がしやすくなったと考えられる。そのため、標準機一覧のものとは異なる。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2に対して、メリットは、機体の重量が軽くなり、より動作がしやすくなった点がある。デメリットは特にないと思われる。
Fig.6 Fig.7にバンパ取り外し後の機体と部品を示す。

Fig.6 バンパ取り外し後の機体

Fig.7 バンパ
電源ボード、電源分岐ボードの取り外し
電源ボードは二つのボードがそれぞれ4本のねじで留められていた。
これを取り外すことで、次手順の基板取付用上部板の取り外しが行いやすくなった。
この部品は標準機と違って二つの基板があった。これは、LEDの動作で多くの電源が必要となるために設計されたと考えられる。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2に対して、メリットについては安定した電力を供給できる点がある。
デメリットとしては、より大容量の電源が必要となり機体が重くなる点がある。
Fig.8 Fig.9に電源ボード取り外し後の機体と取り外したボードを示す。

Fig.8 取り外し後の機体

Fig.9 電源ボード、電源分岐ボード
基板取付用上部板の取り外し
基板取付用上部板を取り外した。
この板は、標準機には存在しない自作のパーツである。ねじ4本でL字金具柱に固定されていて、電源ボードと電源分岐ボードを固定する役割をしていた。
取り付けている時は中心内部にあるボードに触れにくく、ケーブル類が取り外せなかったが、基板取付用上部板を外すことによって中心部のケーブル類の取り外しがしやすくなった。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2について、メリットについては、電源ボードをより安定して固定する事ができる点がある。
デメリットについては、ケーブルの取り外しが行いにくい点がある。
Fig.10 Fig.11に取り外す前と取り外し後の機体を示す。

Fig.10 取り外し前の機体

Fig.11 取り外し後の機体
音楽再生システムの取り外し
音楽再生システム(スピーカー2つと電圧調整ボード1つ)を取り外した。
スピーカーは標準機およびMIRS1403の購入部品表にないので部品ボックス等から回収したと思われる。
それぞれL字金具柱に結束バンド1本ずつで固定されていた。
取り付け方に工夫が施されており、L字金具柱の内側の見えにくい場所に取り付けることによって機体から声が出ているように思わせる効果がある。
目的1について、この部品は標準部品一覧に記載されていない。そのため、ここで得られた部品とその個数は全て増加した。
目的2について、この部品のメリットは、おそらく観客を魅了するという目標達成に向け、エンターテイメント性を追求できる点である。
デメリットについては特にないと思われる。
また、ボードはMIRS1403の自作品で、L字金具柱にねじ4本を用いて固定されていた。解体時に感じた事としてジャンパ線による配線が脆く、断線する可能性の高さがうかがえた。
Fig.12 Fig.13に音楽再生システムと、取り外し後の機体を示す。

Fig.12 取り外し後の機体

Fig.13 音楽再生システム
音楽再生システム下のドータボードの取り外し
機体側面の音楽再生システム下に取り付けられていたドータボードを取り外した。
このドータボードは、ボードの四隅をねじとスペーサーによって基板取り付け用側面板に取り付けられていた。
MIRS1403の機体は縦に長いので、ドータボードを1枚にすると大きくて取り付けにくいため、10のドータボードと合わせて2枚に分けたと考えられる。
ドータボードは今回の手順で取り外したドータボードとLEDボード下のドーダボードの二枚が確認できた。
目的1について、この部品は標準部品一覧の数と一致しているので過不足はない。
目的2について、標準部品のドータボードを使うことによるメリットは、標準部品であるので製作計画書を作成する必要がない事である。
デメリットはモータ制御用端子とタッチセンサ用端子の配線がわかりにくい事である。
Fig.14 Fig.15に取り外した基板を示す。

Fig.14 取り外し中の基板

Fig.15 音楽再生システム下のドータボード
WEBカメラ二つの取り外し
上段シャーシに取り付けられていたWEBカメラを二つ取り外した。
取り付け方は、V-UCU56(Fig.16,Fig.17)の場合は、WEBカメラが金属板に2本のねじで取り付けられており、その金属板が4本のねじで上段シャーシに取り付けられていた。
C270(Fig.18,Fig.19)の場合は、WEBカメラが金属板に2本のねじで取り付けられており、その金属板が2本のねじで上段シャーシに取り付けられていた。
カメラを正面と背面に1台ずつ搭載したことにより広範囲の探索が可能となっている。
目的1について、WEBカメラは今回の手順で取り外した二個が確認できた。1個は標準部品(型番:V-UCU56)であり、もう1個はMIRS1404からの譲受品(型番:C270)である。これは、昨年のMIRSの部品数より一個多い。
目的2について、メリットは画像処理による数字の読み取りと索敵ができる点である。デメリットは消費電力が増加した事と、機体の処理速度に影響が出る事である。
Fig.16 Fig.17 Fig.18 Fig.19にそれぞれのWebカメラを示す。

Fig.16 取り外し前の機体前面カメラ

Fig.17 機体前面カメラ

Fig.18 取り外し前の機体後面カメラ

Fig.19 機体後面カメラ
USBハブの取り外し
機体側面のL字金具柱に結束バンドによって取り付けられていたUSBハブを取り外した。
これは標準部品ではなく購入物品表にも記載されていないため、部品ボックスから回収された物だと思われる。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2について、メリットはより多くのUSB機器の接続ができ、多くのUSB機器の取り付けをできる点がある。
取り付けたことによるデメリットは特にないと思われる。
Fig.20 Fig.21に取り外し前の機体とUSBハブを示す。

Fig.20 取り外し前の機体

Fig.21 USBハブ
LEDボードの取り外し
側面板にねじとスペーサーによって取り付けられていたLEDボードを取り外した。この基板はMIRS1403で自作された物である。
この基板は装飾のために機体側部に取り付けられていたLEDを制御するために取り付けられたと考えられる。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2について、メリットとしては、LEDを制御できる点がある。
取り付けたことによるデメリットは特にないと思われる。
Fig.22 Fig.23にLEDボードと取り外し後の機体を示す。

Fig.22 取り外し後の機体

Fig.23 LEDボード
LEDボード下のドーダボードの取り外し
機体側面の左右に取り付けられていた2枚のドータボードを取り外した。
取り付け方は、ボードの四隅をねじとスペーサーによって基板取付用側面板に取り付けられていた。
MIRS1403の機体は縦長のためドータボードを1枚にすると取り付けにくくなるため2枚に分けたと考えられる。
目的1に対して、標準機部品一覧の数より、このパーツに過不足はなかった。
目的2に対してメリット、デメリットはない。
Fig.24 Fig.25に取り外し後の機体とボードを示す。

Fig.24 取り外し前の機体

Fig.25 LEDボード下のドーダボード
超音波センサボードの取り外し
機体側面に取り付けられていた超音波センサーボードを取り外した。
取り付け方は、ボードの四隅をねじ4本とスペーサーによって基板取付用側面板に取り付けられていた。
MIRS1403は、市販の超音波センサーを使用するため、このボードを作成したと考えられる。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2に対してメリットは、精度の良い超音波センサを使うことができる。
デメリットは、特にないと思われる。
Fig.26 Fig.27に取り外し後の機体とボードを示す。

Fig.26 取り外し前の機体

Fig.27 超音波センサボード
モーター制御ボードの取り外し
機体側面に取り付けられていたモーター制御ボードを取り外した。
このボードはMIRS1403で新規設計された。これは、モーターの回転速度を上げ、かつ発熱が小さくなるように標準機のモーター制御ボードを改良したものと考えられる。そのため、MIRSMG3Gのモーター制御ボードとは異なる。
これらは、基板取付用側面板にねじ5本で固定されていた。
目的1について、この部品は、上で記述した通り標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2に対して、メリットはこのボードは改良によりモータの回転速度が上がり、MIRSの移動速度が上がったと思われることである。
デメリットはないと思われる。
Fig.28 Fig.29に取り外し前の機体とボードを示す。

Fig.28 取り外し前の機体

Fig.29 モーター制御ボード
側面板の取り外し
左右側面に取り付けられていた基板取付用側面板を取り外した。
これは標準機にはなくMIRS1403で新規設計された。
2枚のドータボード、LEDボード、超音波センサーボードを取り付けるための部品であると考えられる。
この板は、それぞれのL字金具柱にねじ4本で固定されていた。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2について、メリットは基板が側面で整理されてわかりやすくなる点がある。
デメリットは得にないと思われる。
Fig.30Fig.31に取り外し後の機体と取り外した側面板を示す。

Fig.30 側面板取り外し後の機体

Fig.31 側面板
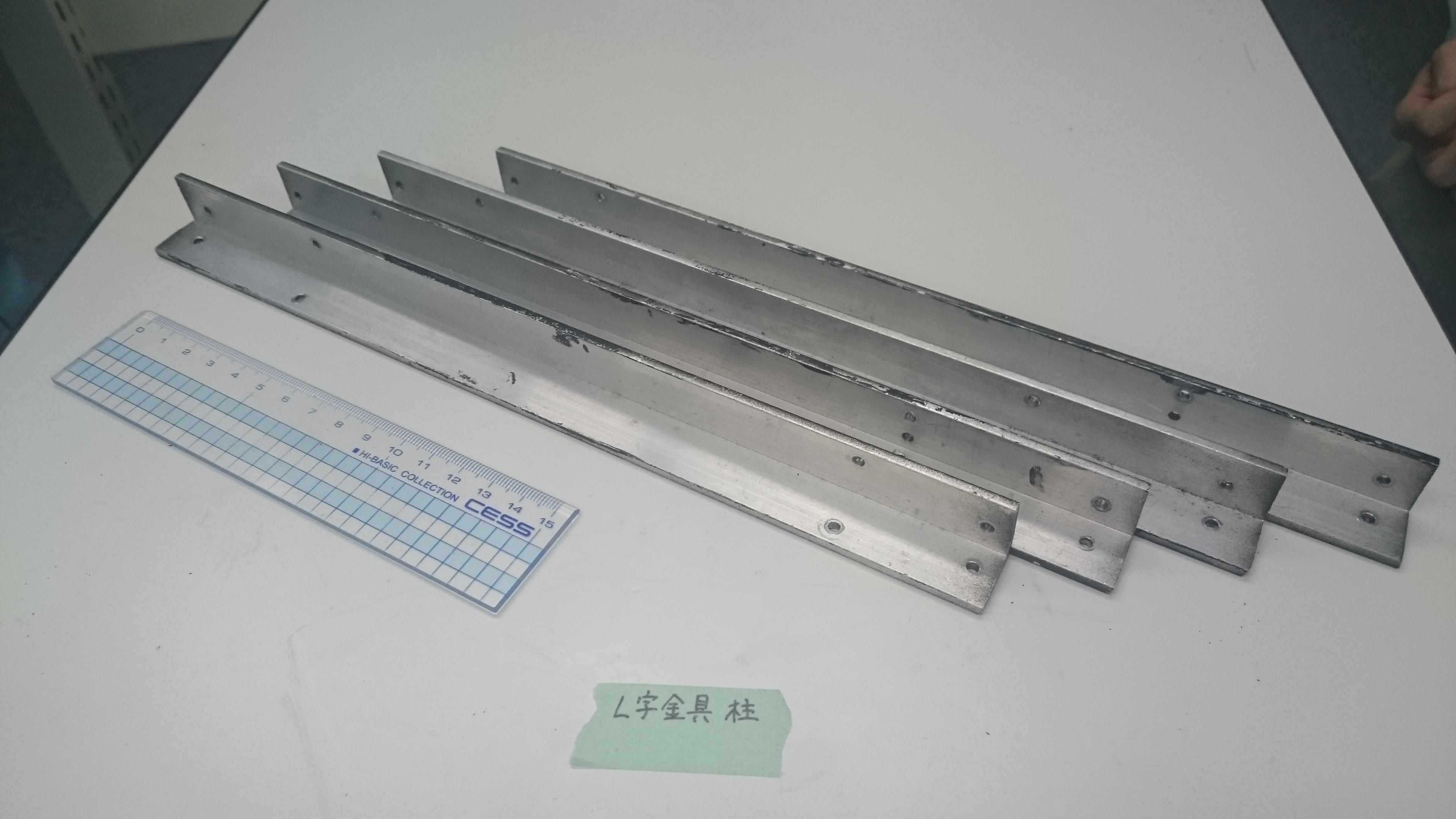
L字金具柱、上部金具及びLEDテープの取り外し
上部金具2本とL字金具柱4本、LEDテープ4枚を取り外した。
3点ともにMIRSMG3Sはなく、MIRS1403の自作または、購入部品である。L字金具柱はCPUボードを囲み固定しやすくなるほかに、
基板取付用側面板を取り付ける際に用いられていた。上部金具は基板取付用上部板の取り付けや余ったケーブルを巻き付ける役割を果たしていた。
L字金具柱2本の上側に対して上部金具が横向きに1本ねじ2本によって取り付けられていた。
また、L字金具柱の下側はL字金具柱2本に対してL字土台金具1本がねじ1本によって固定されていた。
目的1について、この部品は、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2について、LEDテープを取り付けたメリットは、LEDテープを光らせることにより見た目にも美しく、
観客の興味を惹かせる意味があると思われる。デメリットは特にないと思われる。
上部金具とL字金具柱を取り外したことによってFPGAボードとCPUボードを取り外しやすくなった。
Fig.32 Fig.33に取り外した上部金具とL字金具柱を示す。

Fig.32 L字金具柱

Fig.33 上部金具
内部部品の取り外し
FPGAボードとCPUボードの取り外し
本体の上段シャーシの上に取り付けられていたFPGAボードとCPUボードを取り外した。
これらは標準部品の規格通りである。
ボードの四隅を計4本のねじで留められていた。
目的1について、それぞれの部品に過不足はなく、今年の標準部品数と比べても過不足はなかった。
目的2について、標準部品のままであるためメリットやデメリットは存在しない。 これらを取り外したことにより、周辺のパーツを取り外しやすくなった。
Fig.34 Fig.35に取り外し後の機体とボードを示す。

Fig.34 取り外し後の機体

Fig.35 FPGAボードとCPUボード
超音波センサの取り外し
本体の上段シャーシに取り付けられていた超音波センサ4つを取り外した。
これらは、標準部品ではなく、MIRS1403で新規購入されたものである。
この機体では標準機のものとは違い回路は別となっていた。
これらは、それぞれ下部のアクリル部分がねじ2本で固定されていた。
基板と離して設計されているため、取り付け位置の自由度が高くなっている。
目的1について、今年の標準機部品一覧に、超音波センサはないため比較すると部品数は4つ多い。
目的2について、メリットは超音波センサを多くすることによって、超音波による距離の測定の精度が向上した点がある。
Fig.36 Fig.37に取り外し後の機体と超音波センサを示す。

Fig.36 取り外し後の機体

Fig.37 取り外し後の超音波センサ
上段シャーシとL字金具土台の取り外し
本体の上部シャーシと、上段シャーシに取り付けられていたL字金具土台を取り外した。
これらは標準部品ではなく、MIRS1403で新規設計されたものである。
これらは、CPUボード、FPGAボードを固定できるようにするためと、それらの基板の露出を防ぎ、
他の部品と組み合わせてデザインの統一を図る為に設計されたと考えられる。
上部シャーシは4つそれぞれの支柱にねじ1本で固定されていた。
目的1について、どちらの部品も、標準部品一覧に記載されていない。
そのため、ここで得られた部品とその個数は全て増加した。
目的2に対して、メリットとしては、ボードの固定ができるように設計されている点がある。デメリットは特にないと思われる。
Fig.38 Fig.39 Fig.40に取り外し後の機体と取り外した部品を示す。

Fig.38 取り外し後の機体

Fig.39 上部シャーシ

Fig.40 L字金具土台
タッチセンサの取り外し
下部シャーシに取り付けられていたタッチセンサを取り外した。
タッチセンサは標準部品であるが、数が多くなっていた。
これは、標準機と比べ認識感度をよくするために設計されたと考えられる。
6つのセンサがそれぞれねじ1本で固定されていた。
目的1に対して、この部品は標準機部品一覧と比べて、タッチセンサが3つ多い。
目的2に対してメリットは全方位の衝突に反応する事ができる点がある。デメリットは特にないと思われる。
Fig.41 Fig.42に取り外し後の機体と取り外したセンサを示す。

Fig.41 タッチセンサ

Fig.42 取り外し後の機体
キャスターの取り外し
これは二本のねじで留められていた。標準機の部品であり、機体のバランスを保つためにある。この部品は数量通りであった。
目的1に対して、標準機部品一覧より、この部品に過不足はなかった。
目的2に対して、標準部品であるため、メリットやデメリットは特にない。
Fig.43 Fig.44に取り外し後の機体と取り外したキャスターを示す。

Fig.43 取り外し後の機体

Fig.44 キャスター
アルミタイヤの取り外し
これらは、下部シャーシに取り付けられていた。
標準機と違いMIRS1303で設計されたアルミタイヤを使用していた。アルミタイヤは、標準機のタイヤと比べ固いため、ロータリーエンコーダーの値を正確に取れるようにする為に設計されたと考えられる。
アルミタイヤにはロータリーエンコーダーとモーターがついていた。
目的1に対して、標準機部品一覧より、このモーターとロータリーエンコーダーに過不足はなかった。
また、アルミタイヤについては標準機部品一覧に記載されていないため、ここで得られた部品とその個数は全て増加した。
目的2に対して、メリットは、エンコーダの値を正確に測定する事ができる点がある。
Fig.45 Fig.46に取り外した下部シャーシとアルミタイヤを示す。

Fig.45 取り外し後(下部シャーシ)

Fig.46 アルミタイヤ
全部品図
MIRS1403の機体を構成した各部品を以下に示す。標準機と比べて、独自機能が多い事から、新規設計された部品が多いために、標準機より部品数が多かった。 まず、Fig.47に解体した部品全てを示す。

Fig.47 全体図
各部品図
以下に各部品の一覧を示す。| 種別 | 部品名 | 個数 | 部品図 | 部品説明 | 備考 | ||
|---|---|---|---|---|---|---|---|
| ボード | CPUボード | 1 |
|
|
|||
| FPGAボード | 1 |
|
| ||||
| ドータボード | 2 |
|
|
||||
| モータ制御ボード | 1 |
|
|
||||
| モータ制御ボード(自作) | 1 |
|
|
||||
| 超音波センサボード(親) | 1 |
|
|
||||
| 超音波センサボード(自作) | 1 |
|
|
||||
| 音楽再生ボード(自作) | 1 |
|
|
||||
| 電源ボード | 2 |
|
|
||||
| LEDボード(自作) | 1 |
|
|
||||
| 電源分岐ボード | 2 |
|
|
||||
| メカ部品 | 支柱(丸) | 4 |
|
|
|||
| L字金具柱 | 4 |
|
|
||||
| 上部金具 | 2 |
|
|
||||
| モーニングスター柄 | 2 |
|
|
||||
| USB取り付けパネル | 2 |
|
|
||||
| 基板取付用側面板 | 2 |
|
|
||||
| 基板取付用上部板 | 1 |
|
|
||||
| L字金具土台 | 4 |
|
|
||||
| バンパ | 6 |
|
|
||||
| モータ・ギア | 各2 |
|
|
||||
| ロータリエンコーダ | 2 |
|
|
||||
| モータ・エンコーダ取り付け金具 | 2 |
|
|
||||
| ボールキャスター | 2 |
|
|
||||
| 上段シャーシ | 1 |
|
|
||||
| 下段シャーシ | 1 |
|
|
||||
| 車輪 | 2 |
|
|
||||
| センサ・カメラ | タッチセンサ | 6 |
|
|
|||
| 超音波センサ | 4 |
|
|
||||
| 前面Webカメラ | 1 |
|
|
||||
| 後面Webカメラ | 1 |
|
|
||||
| 電子コンパス | 1 |
|
|
||||
| ケーブル(信号系) | 超音波センサー接続ケーブル | 1 |
|
|
|||
| シリアル接続ケーブル | 1 |
|
|
||||
| FPGAD変換ケーブル | 3 |
|
|
||||
| 12ピンフラットケーブル | 3 |
|
|
||||
| 4ピンフラットケーブル | 10 |
|
|
||||
| 3ピンフラットケーブル | 4 |
|
|
||||
| USB引き出しケーブル | 2 |
|
|
||||
| ディスプレイ引き出しケーブル | 1 |
|
|
||||
| DB9引き出しケーブル | 1 |
|
|
||||
| ロータリーエンコーダー接続ケーブル | 2 |
|
|
||||
| ケーブル(電源系) | CPUボード電源ケーブル | 1 |
|
|
|||
| バッテリ接続ケーブル | 2 |
|
|
||||
| 両DCケーブル | 4 |
|
|
||||
| バナナプラグケーブル | 3 |
|
|
||||
| その他 | マイクロスピーカー | 2 |
|
|
|||
| LEDテープ | 4 |
|
|
||||
| USB無線LANアダプタ | 1 |
|
|
||||
| 無線マウス・キーボードUSBアダプタ | 1 |
|
|
||||
| コンパクトフラッシュメモリ | 1 |
|
|
返却 |
























































総括
-
今回の解体機と標準機との部品の種類と数の比較をTable3 に示す。
Tabel3 の個数の欄が空白になっている部品は標準機部品一覧(新)に記載されていない部品である。
使用可能な部品 種類 部品名 個数 確認個数 備考 ボード CPUボード 1 1 目視により確認。 FPGAボード 1 1 目視により確認。 ドータボード 2 2 MIRSMG3D-MG3S-0007 より鏡向き。 モータ制御ボード 2 1 新モーターコントロールボード回路図 のfig.1より確認。MIRS1403の自作ボードが1つあることを目視により確認。 超音波センサボード(親機) 1 1 超音波センサボード製造仕様書(親機) の図1により確認。MIRS1403の自作ボードが1つあることを目視により確認。 超音波センサボード(子機) 1 0 超音波センサボード製造仕様書(子機) の図2により確認。MIRS1403の自作ボードが1つあることを目視により確認。 音楽再生ボード(自作) 1 MIRS1403で新規に設計された部品。 LEDボード(自作) 1 MIRS1403で新規に設計された部品。 電源ボード 1 0 デュアルレギュレータ電源ボード製造仕様書 を参照して製作。MIRS1403の自作ボードが2つあることを目視により確認。 メカ部品 シャーシ(上段) 1 0 MIRS1403の自作シャーシが1つあることを目視により確認。 シャーシ(下段) 1 0 MIRS1403の自作シャーシが1つあることを目視により確認。 支柱(角) 4 0 ラック製造仕様書を確認したが該当する部品は確認できなかった。 支柱(丸) 4 4 支柱製造仕様書 により確認。 L字金具柱 4 MIRS1403の基板収納タワーの制作で作成された部品の一つである。 上部金具 4 MIRS1403の基板収納タワーの制作で作成された部品の一つである。 モーニングスター柄 4 MIRS1403のモーニングスターの制作で作成された部品の一つである。 USB取り付けパネル 1 1 各種ポート取付板製造仕様書 コネクタ取り付けボード1により確認。 MIRS1403の自作パネルが3つあることを目視により確認。 基板取付用側面板 1 MIRS1403の基板収納タワーの制作で作成された部品の一つである。 基板取付用上部板 1 MIRS1403の基板収納タワーの制作で作成された部品の一つである。 L字金具土台 1 MIRS1403の基板収納タワーの制作で作成された部品の一つである。 PS/2 LAN 取り付けパネル 1 1 各種ポート取付板製造仕様書 コネクタ取り付けボード3により確認。 VGA取り付けパネル 1 0 標準、自作ともになし。 バンパ 3 0 MIRS1403の自作バンパが6つあることを目視により確認。 モータ・ギア 2 2 目視により確認。 ロータリエンコーダ 2 2 目視により確認。 タイヤ・ホイール 2 1 MIRS1403の自作が2つあることを目視により確認。 モータ・エンコーダ取り付け金具 2 2 モーター取り付け金具製造仕様書 および ロータリーエンコーダ取り付け金具製造仕様書 により確認 ボールキャスター 2 2 目視により確認。 センサ・カメラ タッチセンサ 3 6 目視により確認。 超音波センサ 4 目視により確認。 Webカメラ 1 2 Webカメラ(型番V-UCU56が1つ、型番V-U0018が1つ)を目視により確認。 ケーブル(信号系) 超音波センサ接続ケーブル 1 1 目視により確認。 シリアル接続ケーブル 1 1 目視により確認。 FPGAD変換ケーブル 2 MIRS1303 解体報告書の各部品図を参照。 12ピンフラットケーブル 3 FPGAボードに2本。
プロジェクトブースの小物入れに1本。8ピンフラットケーブル 2 0 目視により確認。 4pinケーブル 3 10 ドータボードに2本。
超音波センサボードに4本。
モータ制御ボードに4本。3ピンフラットケーブル 4 超音波センサボードに4本。 2pinケーブル 2 プロジェクトブースの小物入れに2本。 USB引き出しケーブル 1 2 2015年度版の標準部品一覧(新)に記載されていた部品。MIRS1303 解体報告書の各部品図にはUSBコネクタと記載されている。 LAN引き出しケーブル 1 0 2015年度版の標準部品一覧(新)に記載されていた部品。 ディスプレイ引き出しケーブル 1 1 2015年度版の標準部品一覧(新)に記載されていた部品。MIRS1303 解体報告書の各部品図にはVGAケーブルと記載されている。 PS2引き出しケーブル 1 0 2015年度版の標準部品一覧(新)に記載されていた部品。 DB9引き出しケーブル 1 1 2015年度版の標準部品一覧(新)に記載されていた部品。MIRS1303 解体報告書の各部品図にはシリアル接続ケーブルと記載されている。 片側に4pinソケットでロータリエンコーダにつながるケーブル 2 目視により確認。 ケーブル(電源系) CPUボード電源ケーブル 1 1 目視により確認。 モータ制御ボード接続ケーブル 2 2 目視により確認。 バッテリ接続ケーブル 2 2 MIRS1403の自作ケーブルが2つあることを目視により確認。 両端にDCプラグをもつケーブル 2 モータ制御ボードに2本。 両端にバナナプラグをもつケーブル 4 モータ制御ボードに2本。
プロジェクトブースの小物入れに2本。片側にDCプラグでその反対側にバナナプラグをもつケーブル 1 プロジェクトブースの小物入れに1本。 片側にDCプラグでその反対側にバナナソケットをもつケーブル 2 プロジェクトブースの小物入れに2本。 片側にB端子のみをもつケーブル 1 プロジェクトブースの小物入れに1本。 片側にB端子でその反対側にDCプラグをもつケーブル 2 プロジェクトブースの小物入れに2本。 片側にB端子(ソケット)でその反対側にDCプラグをもつケーブル 1 プロジェクトブースの小物入れに1本。 両端にDCプラグをもつケーブル 2 電源ボードに2本。 その他 マイクロスピーカー 1 MIRS1403で新規購入された物品である。 LEDテープ 7 MIRS1403に搭載されていたのは6本。プロジェクトブースに1本。 USB無線LANアダプタ 1 1 目視により確認。 無線キーボード、USBアダプタ 1 1 目視により確認。USBアダプタはキーボード、マウス共用。 無線マウス、USBアダプタ 1 1 目視により確認。 バッテリー充電器 1 2 目視により確認。 バッテリー 1 3 目視により確認。 コンパクトフラッシュメモリ 1 1 返却済み。
| 改良箇所 | 標準機の場合 | 詳細 | 目的 |
|---|---|---|---|
| 電源ボード | 標準だと、不安定な場合がある。 | 電源ボードが再設計されている。 |
|
| モーター制御ボード | 大電流を流す事が出来ない。 | ボードの改良を行い大電流を流せるようになっている。 |
|
| バンパ | バンパの形状は長方形、材質はアクリルである。 | バンパの形状に丸みをつけた長方形、材質を塩化ビニールに変更した。 |
|
| タイヤ | タイヤが厚い。 | タイヤの厚みを削減した。 |
|
| タッチセンサ | 数が三つである。 | 六つとなっている。 |
|
| 追加箇所 | 詳細 | 目的 | |
| カメラ | 二台搭載した。 |
|
|
| スピーカー | ボードを設計し、新たに搭載した。 |
|
|
| 外装 | LEDテープを搭載した。 |
|
所感
今回は、冒頭で記したようにそれぞれの役割ごとに分担したが、お互いの情報共有が十分でなかった。そのため今後の作業では以下のような事を改善出来る。・写真撮影は一つのカメラで行うのが望ましい(データ整理を行いやすくなるため)
・手順をノートに書く事で、ドキュメントでの作業手順のまとめが行いやすくなる。
・ドキュメント製作者やチームリーダーだけでなく、解体作業を行う者もどのような部品なのか確認しながら行う。
・画像縮小ツールを使う場合、写真の向きをそろえる事でデータ整理が行いやすくなる。
以上の事を踏まえ今後の作業では、それぞれが柔軟に対応して進めていきたい。
また、今回解体したロボットは、配線が複雑で面倒であったが、タッチセンサや超音波センサをはじめセンサ類が充実していた。
これらの部品を活用してシステムを制作していきたい。