| 名称 |
MIRS1303 システム提案書 |
| 番号 |
MIRS1303-DSGN-0001 |
最終更新日:2013.10.30
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2013.10.30 |
鈴木悠人 |
|
初版 |
目次
1.はじめに
-
本ドキュメントは,MIRS1303オリジナル機体についての提案書である.
2.システム概要
-
- コンセプト
完璧な自己位置の把握
- ハード
小型化
シャーシを25cm四方に収まる程度に小型化
ホイールを昨年度のMIRS1203班のものを流用
[メリット]
- 壁と接触しにくくなり,タッチセンサの余計な反応を減らせる→軌道修正の回数を少なくできる.
[デメリット]
- 配線やボードの置き方を大きく変更する必要がある
軽量化
シャーシの素材を塩化ビニルに
[メリット]
- 移動速度の上昇
[デメリット]
- 耐久性の低下
- エレキ
電子コンパスの採用
製品名:ディジタルコンパスモジュール HMC6352 1764円
メーカー:Strawberry Linux
Linuxでの制御可能
分解能:0.1度
参考リンク
[メリット]
- エンコーダと組み合わせることで現在位置の把握が可能になる.(絶対座標)
- また、斜め移動も可能にする.これによって最短距離での移動が可能.その図を以下に示す.
- 誤差の累積がない
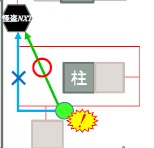
図1 最短距離での移動
[デメリット]
- 新しいプログラムの作成が必要になる
赤外線センサの採用
100円程度のものを3つ使用(前方に1、斜め前2つ)
[メリット]
- 安価で導入が可能
- カメラよりシンプルにターゲットの方角を把握できる.
[デメリット]
- 新しい回路の作成が必要になる
超音波センサの数を4つに
[メリット]
- 周辺の状況を把握しやすい.
- 軌道修正をより正確に
[デメリット]
- 小型化の弊害となる
ドータボードを1つにまとめる
[メリット]
- 小型化・軽量化が可能に
- ボードの配置や配線がすっきりする
[デメリット]
- 手間がかかる
- ソフト
自己位置の把握について
→電子コンパス,ロータリーエンコーダを用いて把握
角などで正対補正を行い、超音波センサを用いて前と横の壁との距離を測り、絶対座標を修正する.その図を以下に示す
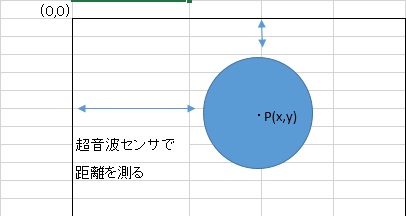
図2 解説図
捜索について
→遠距離:カメラでターゲットの色と形を確認
近距離:赤外線センサ・カメラ を使用。
カメラとターゲットの距離が近いと死角に入られるので死角にいる場合は赤外線センサで方向を把握し,カメラでとる.
また、怪盗を発見したらそのことをMIRSがメールで報告、LEDで状況確認、MIRSをしゃべらせて状況確認なども検討.
これらをまとめた図を以下に示す.

図3 提案まとめ
3.システム外観図
-
以下にシステム外観図を示す.
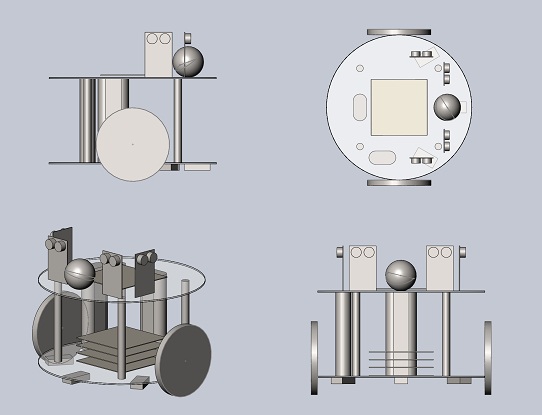
図4 外観図
バッテリーは、縦置きにするなどして省スペース化
4.攻略方針
-
- 巡回
自己位置を,センサを用いて把握しながら走行する.
宝の確認は,自己位置と角度から宝の位置を推定し,カメラを用いて確認する.
ロータリーエンコーダとコンパスのみだと障害物をよけられないときがあるので
補助として超音波センサを用いる.
- 怪盗確保
盗難情報受信で犯行現場に急行
カメラ,赤外線センサを用いながら怪盗を追跡する.
MIRS1303高専祭用ポスター
MIRS1303ドキュメント管理台帳