- MIRS1202に使用されていたものをそのまま使用する。本来は制御系のスイッチは赤であるが、MIRS1202からの引継いだボードに使用されていたスイッチは白であった。しかし、問題はないのでこのまま使用する。
図1 電源ボード
・参考ドキュメント:-
- MIRSSTND デュアルレギュレータ電源ボード製造仕様書
- MIRSSTND デュアルレギュレータ電源ボード取扱説明書
- MIRSSTND デュアルレギュレータ電源ボード製造仕様書
- MIRSMG3D電源ボード
- テスタ
- 安定化電源
- はんだごて、はんだ、はんだ吸い取り線
3.1.1 部品配置チェック
-
仕様書を印刷して手元に準備する。
仕様書と基板を比較し、部品がすべて正しく実装されていることを目視で確認する。
確認したものは、直接仕様書の実装図へチェックをしていく。
-
テスタを用いて導通試験を行う。この試験に合格するまで電源装置へ繋ぐことのないようにする。
このそれぞれの項目を2回ずつ行い、2回とも合格した場合、導通試験に合格したものとする。
1.導通すべき端子間の確認- ・導通すべき点が導通しているかを確認する。テスタを抵抗値を測るレンジにあわせ配線の端子間の抵抗値を測る。仕様書の回路図と照らし合わせ、適切な抵抗値が出ていることを確認する。
・正しいことを確認出来たら、仕様書の回路図にチェックをつける。繰り返し、同じ場所を確認する際は印の色を変えるなどして見落としの無いようにする。
・もし断線が確認できたら、はんだで修復可能な場合は修復、修復不可能な場合は基板を作り直す。修復不可能な場合とは基盤の銅箔が完全に剥がれてしまい部品を基盤につけられないような場合等を指す。修復した際はその周辺の導通を再度確認する。
・すべての端子間が仕様書に沿っていることが確認できたら、この項目を合格とする。
-
・GNDと配線が誤って導通していないかを確認する。各地点間での抵抗値が非常に大きければ導通していないとみなす。
・誤って導通している部分を発見したら、ペンや針などの尖ったもので基盤を削って断線する。
・正しいことを確認出来たら、仕様書の回路図にチェックをつける。繰り返し、同じ場所を確認する際は印の色を変えるなどして見落としの無いようにする。
・すべての配線がGNDとショートしていないことが確認できたら、この項目を合格とする。
- ・導通すべき点が導通しているかを確認する。テスタを抵抗値を測るレンジにあわせ配線の端子間の抵抗値を測る。仕様書の回路図と照らし合わせ、適切な抵抗値が出ていることを確認する。
-
安定化電源を使用するのでショートすることがないように扱いには気をつける。
また、動作中は放熱版の温度が高くなるので、触らないように注意する。
- 制御系電源の試験
- CPUスイッチ(白のスイッチ)がOFFになっていることを確かめる。
- 実装図のCN1(写真1のA)に安定化電源を接続する。安定化電源で7.5VをCPUボードにかける。(7.8Vはバッテリーの定格である。)
- CPUスイッチをONにし、実装図のCN2(写真1のB)に出力される電圧をテスタで計測し、端子間電圧が5V以上5.6V以下(CPUボードの定格電圧に+10%程度)であることを確かめる。(MTCB取扱説明書参照)
・このとき、テストリードの先端部で、CN2をショートしてしまわないように気を付ける。 - テスタの値を見ながら、入力電圧を小さく変化させていく。テスタに示されている値が変化し始める電圧を記録する。さらに、入力電圧を小さく変化させたときの出力電圧の変化した値も記録する。
- 今回の試験では5回チェックを行い、毎回5V以上の入力のときに5V以上5.6V以下の一定の値で出力が安定している場合を合格とする。
・理論値では出力は5.03Vとなっている。(計算式はMIRS技術調査報告書を参照)そのため、理論値にある程度近い値が出ていることが望ましい。
- 駆動系電源の試験
- MPCスイッチ(緑のスイッチ)がOFFになっていることを確かめる。
- 実装図のCN3(写真1のC)に安定化電源を接続する。
- MPCスイッチをONにし、、実装図のCN4に出力される電圧をテスタで計測し、端子間電圧が6Vから6.6Vの間であることを確かめる(MTCB取扱説明書参照)。このとき、テストリードの先端部で、CN4(写真1のD)をショートしてしまわないように気を付ける。
- テスタの値を見ながら、入力電圧を小さく変化させていく。テスタに示されている値が変化し始める電圧を記録する。さらに、入力電圧を小さく変化させたときの出力電圧の変化した値も記録する。
- 今回の試験では5回チェックを行い、毎回6V以上の入力のときに6V以上の値で出力が安定している場合を合格とする。
・理論値では出力は6.25Vとなっている。(計算式はMIRS技術調査報告書を参照。)
- 制御系電源の試験
3.1.2 導通試験
3.1.3 出力電圧測定試験
-
- 今回新しく作成したものである。
・参考ドキュメント:- MIRSMG3D ドータボード製造仕様書
MIRSMG3D ドータボード基板試験仕様書
MIRSMG3D FPGA Quatus設計データおよびTTFファイル
- MIRSMG3Dドーターボード(上下)
- CPUボード、FPGAボード、電源ボード
- 電源ケーブル
- 白線センサ
- タッチセンサ
- ディスプレイ、キーボード、ケーブル
- テスタ
- 安定化電源
- はんだごて、はんだ、はんだ吸い取り線
3.2.1 部品配置チェック
-
仕様書を印刷して手元に準備する。
仕様書と基板を比較し、部品がすべて正しく実装されていることを目視で確認する。
確認したものは、直接仕様書へチェックをしていく。
特にラダー抵抗、ソケットの向きと位置に注意する。
3.2.2 導通試験
-
テスタを用いて導通試験を行う。電源ボードと手順は変わらない。
電源ボードの導通試験を参照する。
3.1.2 導通試験
合格基準も電源ボードの導通試験と同じとする。
3.2.3 I/Oデータ取得試験
-
ドータボードは、FPGAボードの拡張ボードという性質上、単体での動作試験は行うことができない。
そのため動作試験は、他の基板、FPGA内モジュールの動作試験となる。それらの動作が正常であれば、ドーターボードの試験に合格したものとする。
ドータボードの動作試験には、 On/Off I/Oデータ取得試験プログラム を使用する。
具体的には、タッチセンサ、白線センサの値を正しく読み取ってCPUに伝えられるかを試験することで、ドータボードの動作を確認する。
以下に、I/Oデータ取得試験プログラムを用いたドータボードの試験手順について示す。
- MIRSをPCに接続しMIRSMG3D FPGA Quatus設計データおよびTTFファイルのisaio_whole.ttf ファイルを、MIRS実機の /home/mirs/etc にコピーし、MIRSを再機動する。
この操作は一度行えば二回目以降はやらなくてよい。確認する場合は更新日時を見る。 - 最初に、ドータボードに何のセンサーも接続せずに、実行ファイルirs_ts_ws_testを実行し、I/O[1~8]、TS[1~4]のすべてが1であることを確かめる。
- ドータボード回路図 でいう下段のDB_IO1に白線センサ、上段のDB_TS1にタッチセンサを接続する。
- 白い紙などを白線センサに近づけたり遠ざけたりして、I/O[1]が1と0を繰り返すことを確認する。また、タッチセンサを押したり離したりして、TS[1]が1と0を繰り返すことを確認する。
- 白線センサは白い紙などとの距離を変えないようにして、センサの可変抵抗を動かすことでI/O[1]が変わることを確認する。
- 白線センサはDB_IO1~8、タッチセンサはDB_TS1~4のすべてについて、3.と同様の操作をし、その動作を確認する。試験結果は、表を作成して記録する。
5回繰り返してすべてで正常に値が取れた場合、動作試験に合格したとみなす。
異常な結果が出た場合は、センサの不良かボードの不良かを改めて判断する。
標準機にはタッチセンサが3つ、白線センサが2つ用意されているので、全てのポートで認識しない場合にはセンサを取り換えて再度チェックする。
- MIRSをPCに接続しMIRSMG3D FPGA Quatus設計データおよびTTFファイルのisaio_whole.ttf ファイルを、MIRS実機の /home/mirs/etc にコピーし、MIRSを再機動する。
- MIRSMG3D ドータボード製造仕様書
- 今回新しく1枚作成した。標準機には2つ使用するため、去年のものと合わせ2つ試験する。
・参考ドキュメント:- MIRSMG3D MTCB製造仕様書
MIRSMG3D MTCB試験仕様書
MIRSMG3D 走行制御試験プログラム
MIRSMG3D 試験プログラム一覧
- MIRSMG3Dモーター制御ボード
- CPUボード、FPGAボード、電源ボード、ドーターボード
- 電源ケーブル
- ディスプレイ、ケーブル、キーボード
- テスタ
- 安定化電源
- モータ
- ロータリエンコーダ
- はんだごて、はんだ、はんだ吸い取り線
・試験仕様書を読みプログラムを準備しておくこと
3.3.1 部品配置チェック
-
仕様書を印刷して手元に準備する。
仕様書と基板を比較し、部品がすべて正しく実装されていることを目視で確認する。
確認したものは、直接仕様書へチェックをしていく。
3.3.2 導通試験
-
はじめに、ICが外れていることを確認する。
テスタを用いて導通試験を行う。各種ボードと手順は変わらない。
3.1.2 導通試験
導通試験がすべて終わった後に、ICを実装する。
-
この試験ではMCBによるモーター制御とシリアル通信の両方を試験し、その後全体を通した総合試験を行う。
・モータ制御ボードの扱いに関する注意-
モータ制御ボードの電源を入れる際、制御系電源、駆動系電源の順にONにする。
また、電源を落とす際は駆動系電源、制御系電源の順にOFFにする。 (詳細はMTCB取扱説明書参照)
- ロータリエンコーダとシリアル通信の試験
- ロータリーエンコーダからの信号が正常に読み取れるか試験する。
- モーター制御ボードに取り付けるPIC16F88にRE.hexを書き込む。
- ロータリーエンコーダを指で回して、正転させたときにLED1が点灯し、逆転させたときに消灯することを確認する。
- 明滅しなかった場合は制御ボードに問題があるか、接続の仕方が間違っている。
LEDの明滅が正常に行われていることを確認できた場合を合格とする。 - 明滅しなかった場合は制御ボードに問題があるか、接続の仕方が間違っている。
- モーターとPWM制御部の試験
- モーター制御部が正常に動作するか試験する。
- モーター制御ボードに取り付けるPIC16F88にPWM.hexを書き込む。
- 駆動系電源のスイッチをONにする。
- 電源についている電流計が1A以上の値を指した場合は回路のどこかがショートしているので即座に駆動系電源のスイッチをOFFにする。
- モーターが規程の動作をすることを確認する
正転側→ 逆転側→ 正転側→ ブレーキ→ 逆転側→ 正転側→ 逆転側→ ブレーキ(dutyは50%→ 100%→ 0%の順で変化する。)- モーターの動作が正常に行われていることを確認できた場合を合格とする。
モーター自体に異常があるとみなされる場合(モーターから煙が出た場合など)はすぐに試験を止めモーターを交換する。 - モーターの動作が正常に行われていることを確認できた場合を合格とする。
- 総合試験
- MIRSを起動し、ローカルPCでログイン後、走行制御試験プログラムがあるディレクトリに移動する。
-
$ cd /home/mirs/src/mg3_std_program/test
- MIRSを広い床に置き、走行制御試験プログラムを実行する。
-
$ sudo ./motor_test
- 制御方法を選択し、キーボードから入力する。
-
mode select
s:straight r:rotate c:circle
mode:___ (s、r、cのいずれかを入力する)
- パラメータの入力
- 4.1 s の場合:直進距離[mm]と時間[msec]を、キーボードから順に入力する。
-
val[mm] = ___
time[msec] = ___
-
val[deg] = ___
time[msec] = ___
-
val[deg] = ___
time[msec] = ___
circle radious[mm] =___
clockwise -> 0 unticlockwise -> 1 ?
- MIRSが指定した動作を行えた事を確認する。
- 4.1 s の場合:直進距離[mm]と時間[msec]を、キーボードから順に入力する。
プログラムの設定によりモーターの出力が低いときモーターが正常に動作しない場合がある。動作しない設定の値は記録する。動作しない場合は設定の値を大きくしてモーターの出力を上げる。
モーター自体に異常があるとみなされる場合(モーターから煙が出た場合など)はすぐに試験を止めモーターを交換する。 - MIRSを起動し、ローカルPCでログイン後、走行制御試験プログラムがあるディレクトリに移動する。
-
モータ制御ボードの電源を入れる際、制御系電源、駆動系電源の順にONにする。
3.3.3 モータ・エンコーダを用いた動作試験
3.4 超音波センサボード
- 超音波センサ親機1つと子機1つ作成した。標準機には子機を3つ使用するため、去年のものを2つ合わせて試験する。
・参考ドキュメント:- MIRSMG3D 超音波センサボード製造仕様書
MIRSMG3D 超音波センサボード試験仕様書
MIRSMG3D 超音波センサボード回路図
・使用機器- MIRSMG3D超音波センサボード(親子)
- CPUボード
- 電源ケーブル
- 標準機上段シャーシ
- ディスプレイ、ケーブル、キーボード
- テスタ
- 直流安定化電源装置
- メジャー
- はんだごて、はんだ、はんだ吸い取り線
また、動作試験には 超音波距離計測試験プログラムを使用する。
3.4.1 部品配置チェック
-
仕様書を印刷して手元に準備する。
仕様書と基板を比較し、部品がすべて正しく実装されていることを目視で確認する。
確認したものは、直接仕様書へチェックをしていく。
3.4.2 導通試験
-
はじめに、ICが外れていることを確認する。
テスタを用いて導通試験を行う。各種ボードと手順は変わらない。
3.1.2 導通試験
導通試験がすべて終わった後に、ICを実装する。
3.4.3 超音波センサの動作試験および性能の確認
-
超音波距離計測試験プログラムを準備する。
-
- 距離についての試験
- 超音波センサボードと板を、地面から垂直に立て、平行に設置する。
- 超音波センサボードと板との距離をメジャーで測る。
- 実行ファイルuss_testを実行し、距離計測を行い、出力と実際の距離を記録する。
計測する距離は、20cm~30cmを1cm刻み、45cm~55cmを1cm刻み、75cm、100cm、200cm、計測の限界より近いとき、遠いとき、とする。
・計測した値に何%の誤差があるか調べ、明らかに計測可能な範囲で誤差が±20%よりも大きかった場合、再検査するものとする。
- 以下に示す項目をこの試験で調べ、記録する。
- ・センサーと板の間の計測可能な最短距離
5回試験を行い、結果がすべて±1cmの誤差であれば、超音波センサーボードの動作試験の合格とする。
・センサーと板の間の計測可能な最長距離
・計測可能な最短距離より近いときの出力結果
・計測可能な最長距離より遠いときの出力結果 - ・センサーと板の間の計測可能な最短距離
- 角度についての試験
- 超音波センサと板を地面から垂直に立て、板をある角度に回転させたときの、出力と角度、および実際の距離を記録する
- 超音波センサボードと板が並行なときを0°とし、正の向きを上から見たときを右回りとして、-60°、-45°、-30°、30°、45°、60°で計測する。
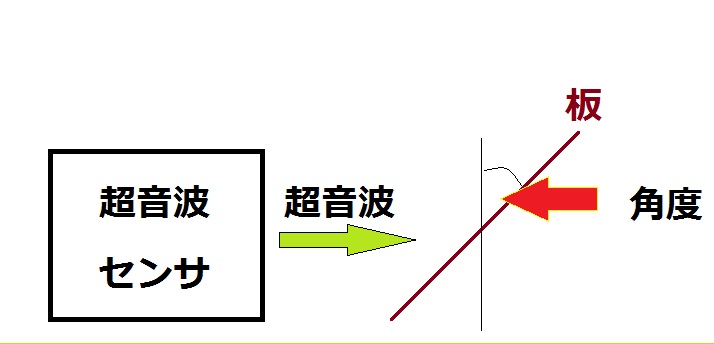
図2 超音波ボードの角度についての試験
- また、出力が明らかに異常な場合は、どの範囲で異常が起こるのかを記録する。
- 以上の実験を20cm~60cmを5cm刻みで距離を変えて行う。 5回試験を行い、結果がすべて同じ結果であれば、超音波センサーボードの動作試験の合格とする。
- 距離についての試験
- MIRSMG3D MTCB製造仕様書