以下に、標準機の電源ボードに採用されているレギュレータLT1083CPの仕様書を示す。
このレギュレータは出力電圧が可変である。その式を以下に示す。
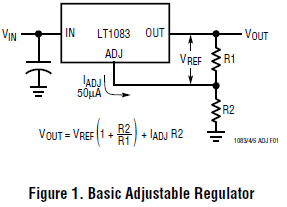
仕様書によれば、VREF=1.25[V]、IADJ=50[μA]である。
標準機の電源ボードの低電圧回路と同様、R2=2[kΩ]とし、R1を可変抵抗とすれば、Figure 1. の式よりR1≒538[Ω]のときVOUT=6[V]となる。
入出力電圧の差(Dropout Voltage)は、仕様書によると最大で1.5Vである(下図)。

バッテリとして用いるラジコン用ニッカド充電電池は7.2Vのものである。フル充電時で8V程はあるが、時間が経つにつれて電圧は落ちてくるので、レギュレーターを用いて6Vを保つのは難しいように思われる。
バッテリーの電圧を上げるか、モータの電圧をもう少し小さい電圧で我慢するかのどちらかが必要であろう。
・バッテリーについて
調べてみると、ニッカド電池は1個が1.2Vであり、それを6個直列に繋いでパッキングしたのが標準機に搭載されているバッテリー(7.2V)である。7.2Vのものは主にRCカー用であるが、電動グライダーやRCヘリ用に8.4V、9.6V、10.8V、12Vが存在する。