3.揹尮儃乕僪
3.1栚揑
-
CPU傗儌乕僞乕傪幚嵺偵摦嶌偝偣偨忬懺偱揹尮揹埑偑埨掕偡傞偙偲傪妋擣偡傞
-
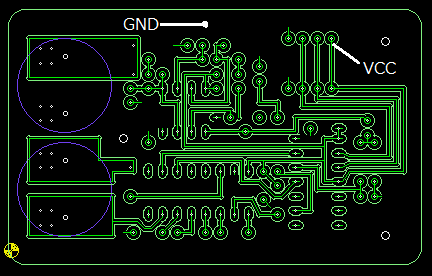
晹昳攝抲妋擣偼丄揹尮儃乕僪丄偼傫偩偛偰丄偼傫偩丄偼傫偩媧偄庢傝慄傪巊梡偟偰栚帇偵偰婎斅偲幚憰恾傪妋擣偡傞丅
娫堘偭偰偄偨応崌偼丄晹昳傪婯掕偺埵抲偵晅偗捈偡丅晹昳偺庢傝奜偟偑崲擄側応崌偼婎斅傪嶌傝捈偡丅
3.2晹昳攝抲妋擣
-
摫捠帋尡偼丄偼傫偩偛偰丄偼傫偩丄偼傫偩媧偄庢傝慄丄僥僗僞乕傪巊梡偟偰夞楬恾偲尒斾傋側偑傜奺晹昳偑宷偑偭偰偄傞偐偳偆偐丄Vcc偲GND偑僔儑乕僩偟偰偄側偄偐傪僥僗僞乕偱挷傋傞丅摫捠帋尡偼扴摉2恖偱1恖1夞丄寁2夞偺帋尡傪峴偆丅
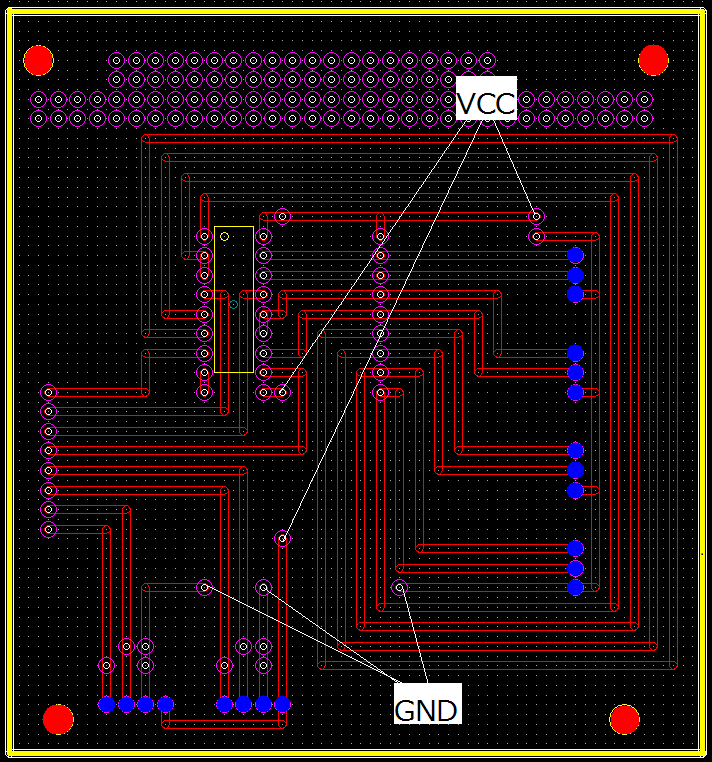
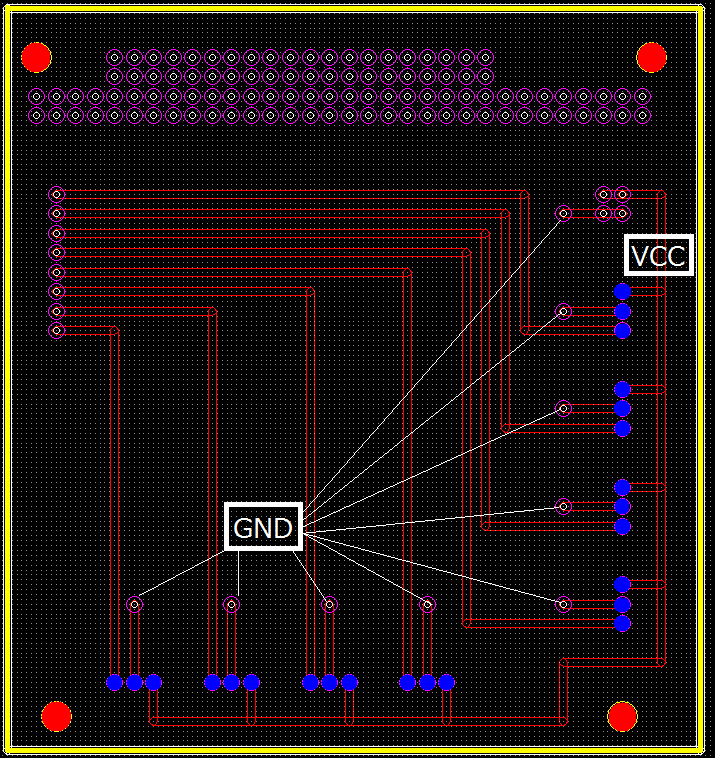
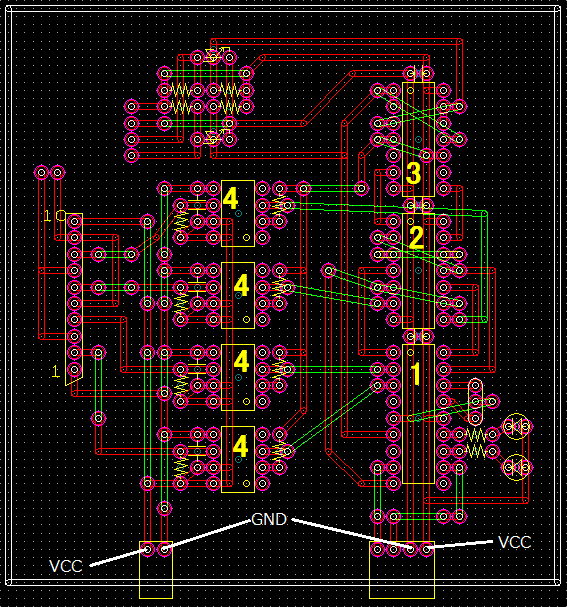
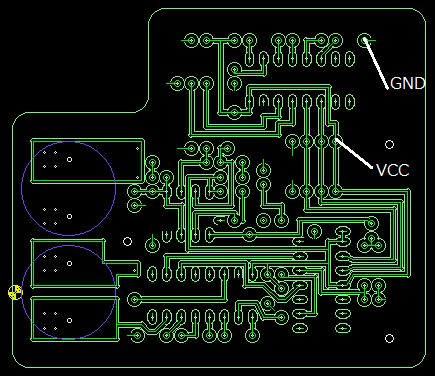
僷僞乕儞恾(夞楬恾)傪恾1,2偵帵偡丅師偺傛偆偵斣崋傪怳傞丅
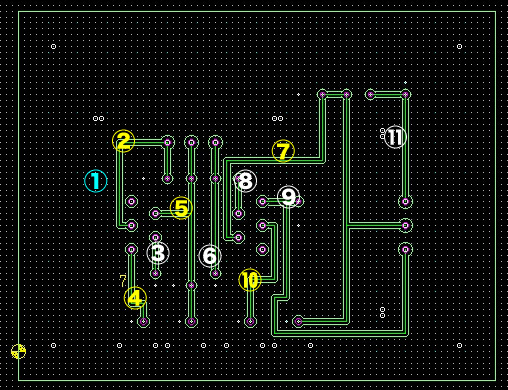
恾1:揹尮儃乕僪僷僞乕儞恾
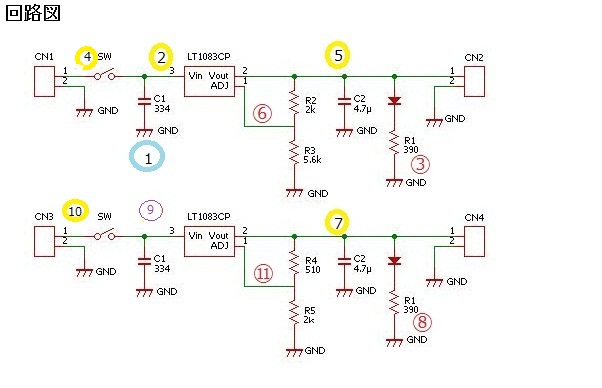
恾2:揹尮儃乕僪夞楬恾
恾偵惵怓偱帵偟偨嘆偼GND丄墿怓偱帵偟偨嘇,嘋,嘍,嘑,嘔偼Vcc偱偁傞丅
傕偟抐慄丄僔儑乕僩偑妋擣偱偒偨傜丄廋暅壜擻側応崌偼廋暅丄廋暅晄壜擻側応崌偼婎斅傪嶌傝捈偡丅
偙偺斣崋偵廬偭偰昞2傪嶌惉偡傞丅
-
昞2:揹尮儃乕僪摫捠妋擣寢壥 嘇 嘊 嘋 嘍 嘐 嘑 嘒 嘓 嘔 嘕 嘆 嘇 嘊 嘋 嘍 嘐 嘑 嘒 嘓 嘔
-