2.試験内容
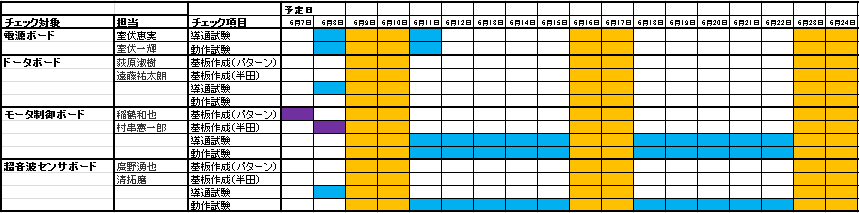
試験を行う対象のボードと、試験を行う予定日を示す。
| 部品名 | 目的 | 備考 |
|---|---|---|
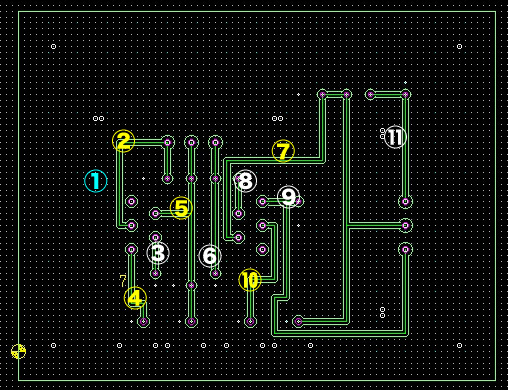
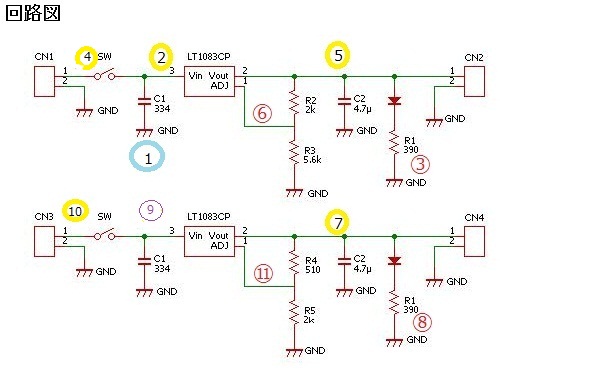
| 電源ボード | ・出力電圧が安定することを確認 | なし |
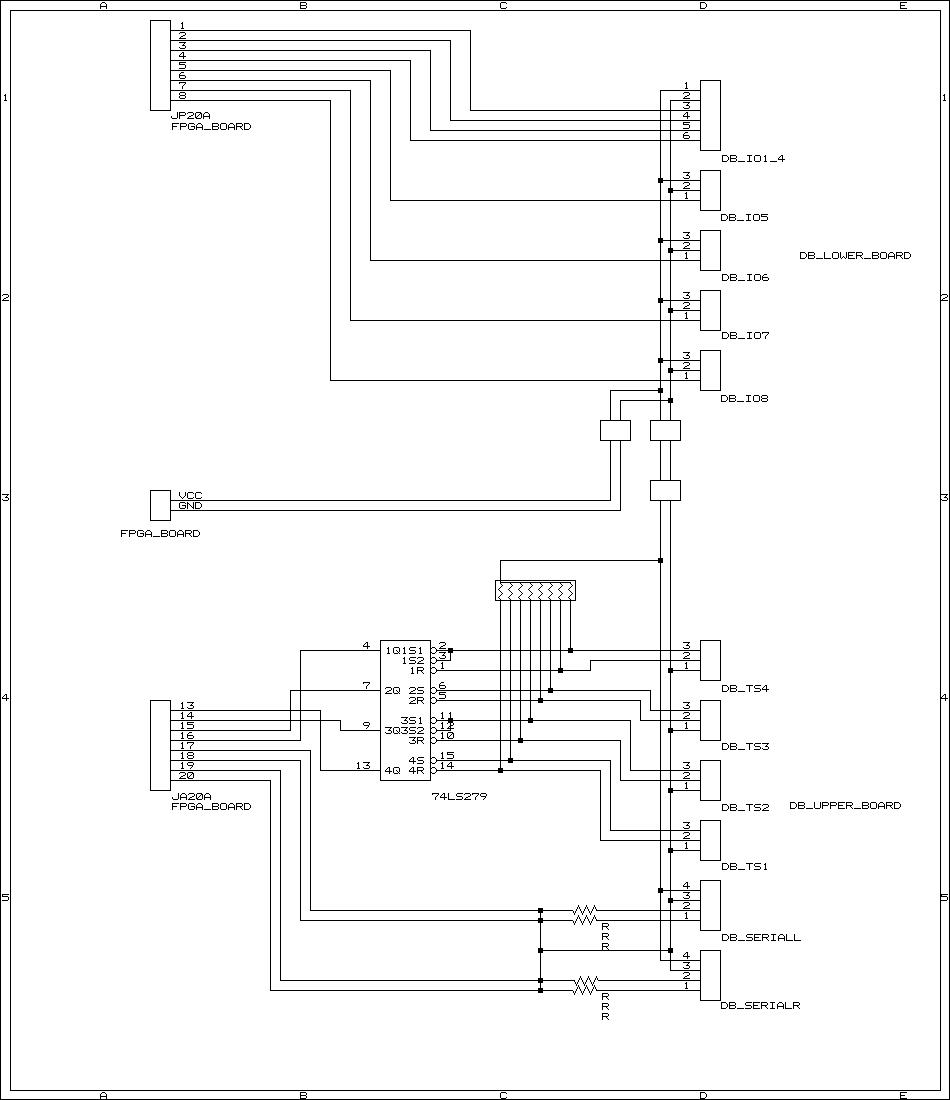
| ドータボード | ・白線センサ、タッチセンサの動作確認 | 2つのボードが、1つにまとめられているが動作そのものに影響はない。 |
| モータ制御ボード | ・シリアル通信、ロータリーエンコーダの動作確認 | なし |
| 超音波センサボード | ・正常な測定ができることの確認 | なし |
試験実施日程はいずれも6月24日までに行うものとする。
試験対象の各々に対し、試験項目、試験内容、担当者名、今後の予定を示す。
| 試験対象 | 試験項目 | 試験内容 | 担当者 | 備考 |
|---|---|---|---|---|
| 電源ボード |
|
MIRSSTND デュアルレギュレータ電源ボード製造仕様書 を参照 | 室伏一輝・室伏恵実 | なし |
| ドータボード |
|
MIRSMG3D ドータボード基壁試験仕様書
を参照 その際 MIRSMG3D On/Off I/Oデータ取得試験プログラム を使用する |
遠藤祐太朗・荻原淑樹 | なし |
| モータ制御ボード |
|
MIRSMG3D MTCB試験仕様書 を参照 | 稲鶴和也・村串憲一郎 | なし |
| 超音波センサボード |
|
MIRSMG3D 超音波センサボード試験仕様書 を参照 | 廣野湧也・清拓磨 | なし |