| 名称 | MIRS1401 ソフトウェア詳細設計 |
|---|---|
| 番号 | MIRS1401-SOFT-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2014.12.12 | 五十嵐,眞野 | 初版 | |
| A02 | 2014.12.17 | 五十嵐,眞野 | 状態遷移図、フローチャートの変更 | |
| A03 | 2014.12.19 | 五十嵐,眞野 | 牛丸先生 | 文章の追加 |
| モジュール名 | 機能 | 概要 | 依存モジュール |
|---|---|---|---|
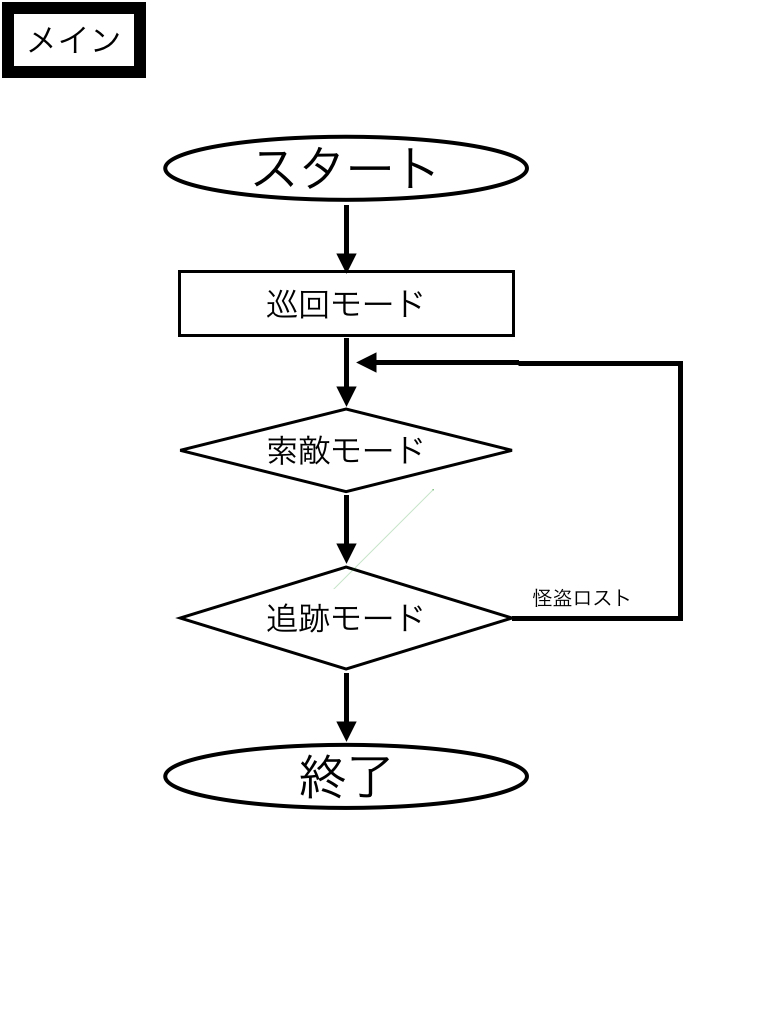
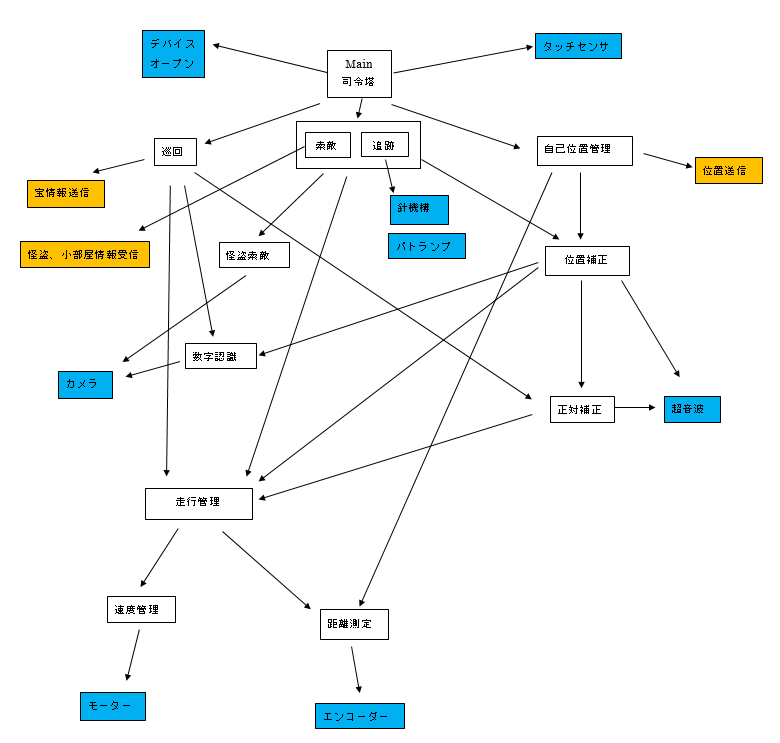
| mirs | 機能統合 | 以下全て | |
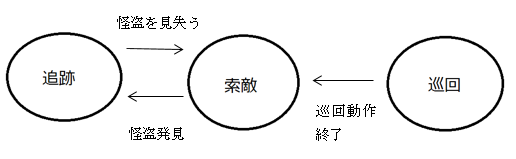
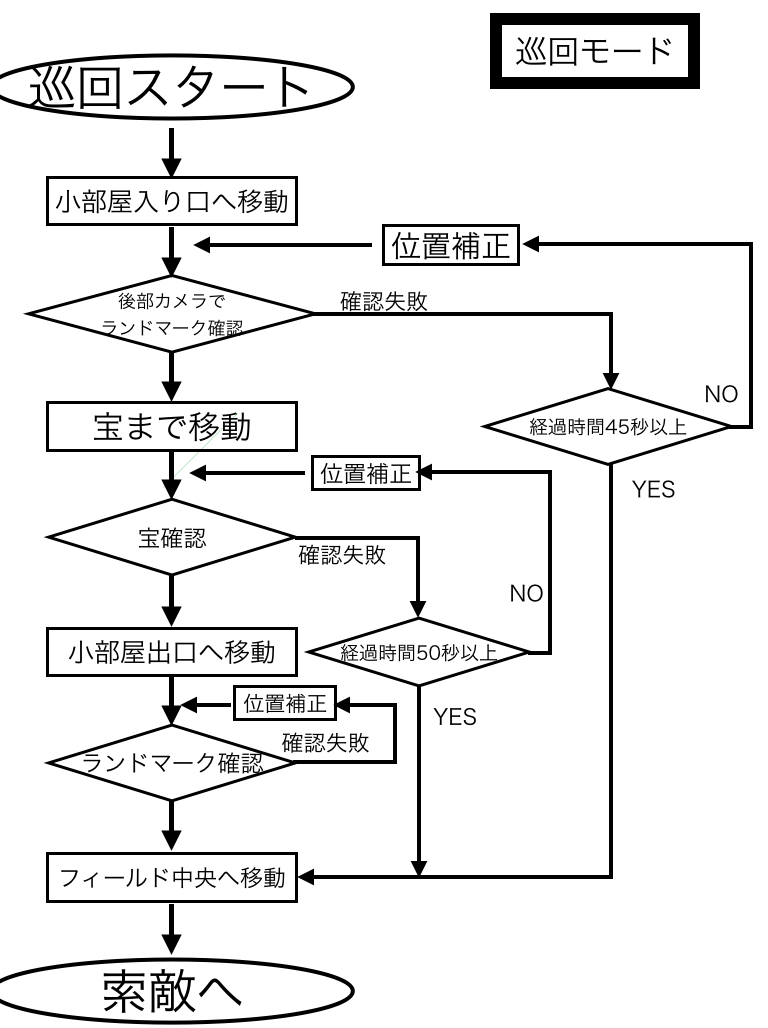
| patrol | 巡回 | コース内を移動し、宝の確認をしたのちに廊下中央に移動する。 | number,run_ctrl,server,direction |
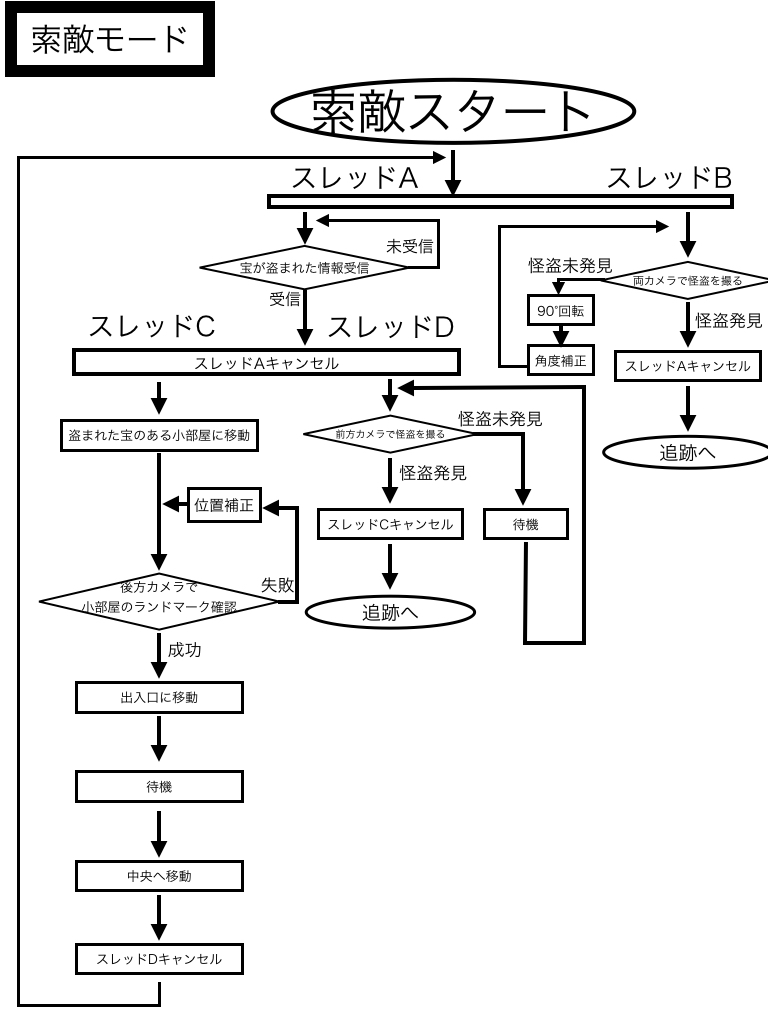
| search | 索敵 | 怪盗を索敵する。 | run_ctrl,thief,server,direction |
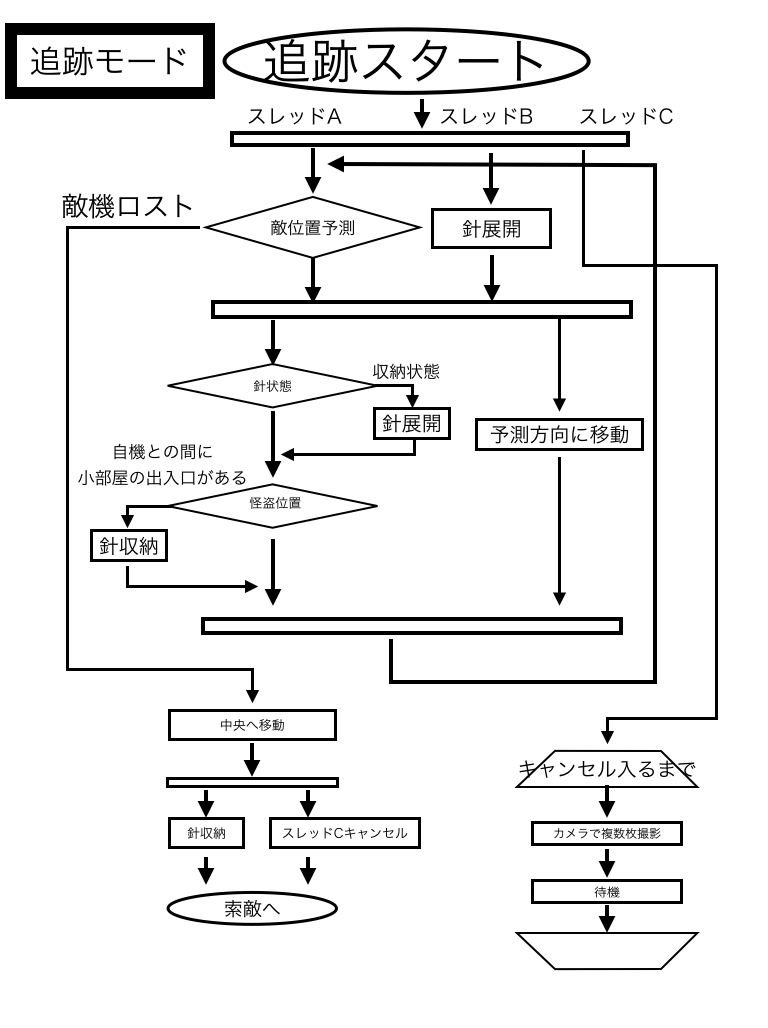
| destroy | 追跡 | 怪盗を追跡、破壊する。 | run_ctrl,thief,needle,direction,lamp |
| map | 自己位置管理 | 自己位置を管理し、その情報をPC側に送信する。 | distance |
| direction | 補正 | 超音波センサなどで位置を補正する。 | run_ctrl,uss |
| number | 数字認識 | ダイレクションボードの数字を読み取る。 | get_image |
| color | 怪盗索敵 | 怪盗についている風船をカメラを使い検知する。 | get_image |
| run_ctrl | 走行管理 | 移動量、旋回量から、3つのモーターの速度を決定し、走行を管理する。 | vel_ctrl,distance |
| vel_ctrl | 速度制御 | 各モーターの回転速度を制御し、一定の速度に保つようにする。 | motor,encoder |
| distance | 距離測定 | エンコーダの値から移動距離、旋回量を求める。 | encoder |
| needle | 針機構 | 針の展開、収納を行う。 | 無し |
| lamp | パトランプ | パトランプを光らせる。 | 無し |
| io | タッチセンサ | タッチセンサの状態の確認をする。 | 無し |
| uss | 超音波センサ | 超音波センサの値をもらう。 | 無し |
| motor | モーター | モーターに指令地を送る。 | 無し |
| encoder | エンコーダ | エンコーダの値をもらう。 | 無し |
| get_image | カメラ | カメラから画像を撮る。 | 無し |
| device_open | デバイスオープン | 各デバイスのオープンを行う。 | 無し |
| server | 送受信 | 宝の情報を送信 盗まれた宝の情報の受信 自己位置の送信を行う。 (3つは別々に使用する。) |
無し |