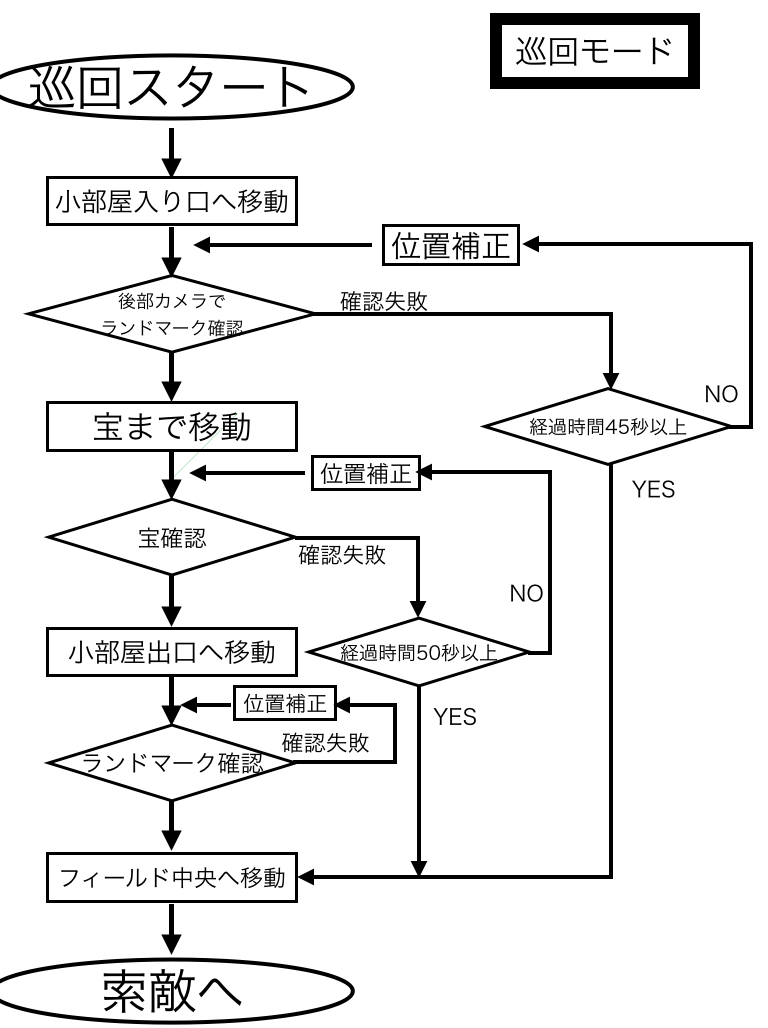
小部屋に向かい、宝を撮影、宝情報をサーバーに送り、廊下の十字路の中央へ移動という動作を行う。
初期位置、確認する宝などは機体組み立て後に動作を見ながら決定する。
巡回路を以下に示す。
向きは図の下向きに正面のカメラがくるようにして、巡回中は回転動作を行わない。
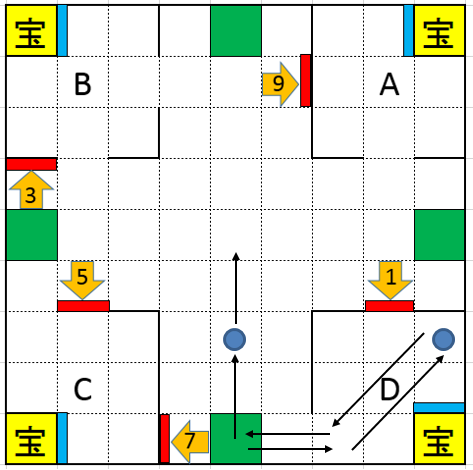
青丸の位置で正対補正を行う。
| 名称 | MIRS1401 patrolモジュール詳細設計 |
|---|---|
| 番号 | MIRS1401-SOFT-0002 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2014.12.8 | 五十嵐,眞野 | 初版 | |
| A02 | 2014.12.17 | 五十嵐,眞野 | 名称の変更 | |
| A03 | 2014.2.2 | 五十嵐,眞野 | 牛丸先生 | 図の追加 |
| 修飾子・戻値 | 名称・引数 | 概要 |
|---|---|---|
| void | patrol() | 巡回動作を行う |