座標変換の図
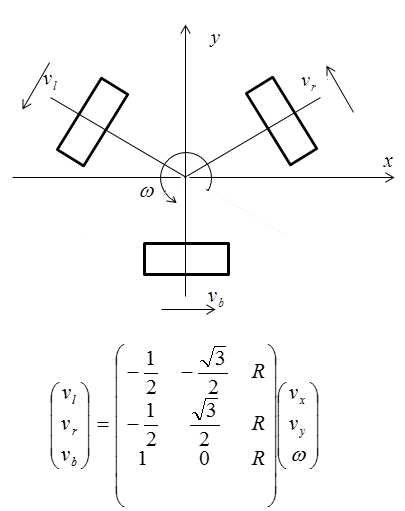
R:重心からタイヤまでの距離
| 名称 | MIRS1408 run_ctrlモジュール詳細設計 |
|---|---|
| 番号 | MIRS1401-SOFT-0008 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2014.12.15 | 五十嵐,眞野 | 初版 | |
| A02 | 2014.12.17 | 五十嵐,眞野 | 名称の変更 | |
| A03 | 2014.12.19 | 五十嵐,眞野 | テスト仕様の変更 | |
| A04 | 2015.2.4 | 五十嵐,眞野 | 牛丸先生 | 追加モジュールについての説明の追加 |
| 型 | 名称 | 概要 |
|---|---|---|
| static float | run_speed | モーターの速度指令値 |
| static int | dist_flag | 走行管理スレッドの使用中の合図 |
| static float | run_x_dist/run_y_dist/run_shet_dist | モーターの移動量、旋回量指令値 |
| static int | ctrl_endflag | 走行管理スレッドの終了の合図 |
| 修飾子・戻値 | 名称・引数 | 概要 |
|---|---|---|
| void | run_ctrl_set(float speed) | スピードをセットする |
| void | void run_ctrl_xy_set_dist(float x_vec_dist, float y_vec_dist) | x方向の移動量、y方向の移動量をセットする |
| void | void run_ctrl_set_shet_dist(float shet_vec_dist) | 旋回量をセットする。 |
| void | run_ctrl_get_endflag() | 指定距離走行(or指定角度回転)終了のフラグを取得する |
| void | run_ctrl_create() | 走行制御スレッドを生成する |
| void | run_ctrl_cancel() | 走行制御スレッドをキャンセルする |
| void | run_ctrl_stop() | 機体を停止させる |
| void | run_ctrl_reset() | 走行制御をリセットする |
| void | run_ctrl_set_Kfr(float Kfr) | 距離減速ゲインを変更する |
| void | run_ctrl_reset_Kfr() | 距離減速ゲインももとに戻す |