2.1 超音波センサ
指定されたポートの超音波センサで距離測定を行い、その値を返す。
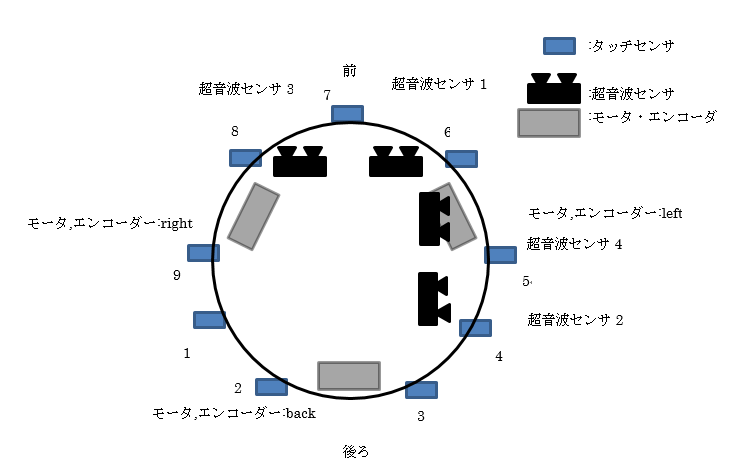
超音波センサは3つ使用する予定である。
実際に4つ使用した。
それぞれのポート番号と機体の配置関係を下の図に示す。
実際に4つ使用した。
それぞれのポート番号と機体の配置関係を下の図に示す。
2.2 モーター
モーターにduty比を送り駆動させる。
3つのモーター、エンコーダの変数において、right(r):右、left(l):左、back(b):後と対応付けている。
モーター、エンコーダの変数と配置の関係は下に示す。
3つのモーター、エンコーダの変数において、right(r):右、left(l):左、back(b):後と対応付けている。
モーター、エンコーダの変数と配置の関係は下に示す。
2.3 エンコーダ
3つのエンコーダーの値を計測する。
変数との対応はモーターと同じである。
変数との対応はモーターと同じである。
2.4 タッチセンサ
9個のタッチセンサのオン、オフを計測する。
オンを0(char型)、オフを1(char型)とする。
タッチセンサの番号は下の図に示す。
オンを0(char型)、オフを1(char型)とする。
タッチセンサの番号は下の図に示す。
2.5 カメラ
2台のwebカメラを使い画像の取得を行う。
前のカメラを使うときは0を、後ろのカメラを使うときは1を引数にしてどちらのカメラを使うか選択する。
前のカメラを使うときは0を、後ろのカメラを使うときは1を引数にしてどちらのカメラを使うか選択する。
2.6 パトランプ
パトランプのオン、オフを行う。(一度呼び出されたら、次に呼び出されるまでその状態を保持する。)
2.7 針機構
針の展開、回収を行う。
2.8 デバイスオープン
モーター、エンコーダ、タッチセンサ、超音波センサ、パトランプ、針機構のデバイスオープン、クローズを行う。
2.9 配置と変数名の対応