はじめに
本ドキュメントでの導通と絶縁の基準は導通は20Ω以下、絶縁は10kΩ以上と予想する、この予想はMIRS1204 標準ボード試験報告書
の導通チェックシートを結果を参考に予想した、あくまで予想なので基準は実際計測してから決定する。
試験項目
| 試験対象 | 試験項目 | 担当者 | 試験予定日 | 備考 |
|---|---|---|---|---|
| バンパー |
| 古儀、新谷 | 6/11まで | |
| 電源ボード |
| 野澤、大塚 | 6/11まで | |
| ドータボード |
| 古儀、部谷 | 6/11まで | |
| モーター制御ボード |
|
堀水、伊藤 | 6/12まで | |
| 超音波センサボード |
|
五十棲、新谷 | 6/11まで |
バンパー
目的
標準機のバンパーとしての役割を果たすため
試験方法
MIRSMG3D バンパー製造仕様書を参考に外形寸法、穴位置・大きさのチェック をする。
漏れをなくすために製作者と試験担当者とでのダブルチェックを行い、チェックシートとして設計図を印刷し印をつける。
電源ボード
目的
電源ボードが正常に動作するか確認し、仕様どおり作成され、MIRS標準機に組み込んだとき正常に動作させるため。部品配置確認
MIRSSTND デュアルレギュレータ電源ボード製造仕様書を参照して作成し た電源ボードと実装図を照らしあわせ目視で確認する。- 実装図と比較しながら目視で部品の位置をチェックする。
- 実装図と比較しながら目視で部品の向きをチェックする。
導通試験
MIRSSTND デュアルレギュレータ電源ボード製造仕様書の
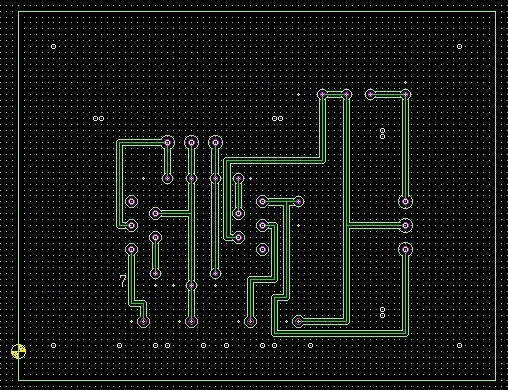
パターン図を参照して作成した電源ボードと照らし合わせ、テスターを使用しVccとGNDが短絡してないか、各部品が正しくつながっているかを確認する。試験方法
部品配置確認・導通試験に関しては、MIRSSTND デュ アルレギュレータ電源ボード製造仕様書を参照する。参考ページ
MIRSMG3D 超音波センサボード試験仕様書
チェックシートは、仕様書の部品表を印刷したものを用い確認した部品に印をつける。
チェックの手順
もしも仕様と異なる場合は、はんだごて、はんだ、はんだ吸い取り線を使用し部品を規定の位置に付け直す。また、修正不可能なら作り直す。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
チェックシートとしては印刷したパターン図を用い、導通が確認できたら印をつける。
もしも導通していなかったらビニール線などで直接つなぐ。短絡していたらはんだを付け直すか、接触部分をカッターで削る。修正不可能ならもう一度基板の削りだしを行う。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
パターン線図をFig1に示す
 |
動作試験については、安定化電源(7.8V)をCH1,CH3に接続した際
- PUスイッチがONのとき、CH2に出力される電圧が5.1V
- MPCスイッチがONのとき、CH4に出力される電圧が6.1V
実際にCPU、モーターを動かした状態での試験も行う。CPUは、重い処理は行わない状態で測定する。モーターは、空回しの状態で測定を行う。
なお、バッテリー(定格7.8V)が支給された際には、バッテリーを用いて再度試験を行う。
合格できなかった場合、回路・素子の見直しを行い、修正する。
詳しくはMIRS1102 電源ボード試験仕様書を参照
CHの位置は電源ボード実装図を参照
部品配置確認、導通試験の参考
ドータボード
目的
ドーターボードが正常に動作するか確認し、仕様どおり作成され、MIRS標準機に組み込んだとき正常に動作させるため。
部品配置確認
MIRSMG3D ドーターボード試験仕様書を参照して作成したドータボードと 実装図を照らしあわせ目視で確認する。- パターン図と比較しながら目視で部品の位置をチェックする。
- パターン図と比較しながら目視で部品の向きをチェックする。
導通試験
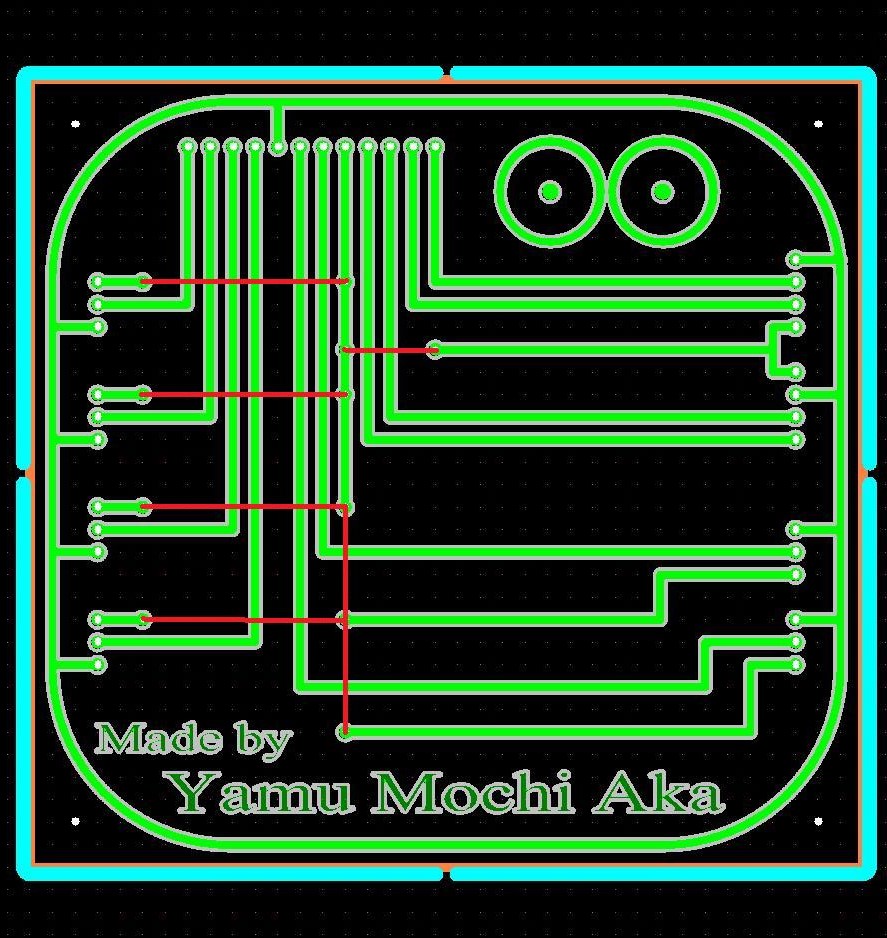
MIRSMG3D ドーターボード回路図、
ドータボードパターン図(Fig2)を参照して作成したドータボードと回路図を照らし合わせ、テスターを使用し端子と端子が導通しているか確認する試験方法
動作試験の方法はMIRSMG3D On/Off I/Oデータ取得試験プログラム、を参照する。
- ドーターボードにCPUボード、FPGAボード、白線センサ、タッチセンサ、ディスプレイ、電源ボード、安定化電源またはバッテリーを接続。
- MIRSを起動し/home/mirs/src/mg3_std_program/testにあるOn/Off I/Oデータ取得試験プログラムirs_ts_ws_testを実行する。
- センサが接続されているポートの出力が全て0であり、接続されていないポートの出力が全て1であることをディスプレイで確認する。
- タッチセンサを押して、タッチセンサがついているポートの出力が1であることを確認する、 もしも失敗したら、接続に不備がないか確認、それでも失敗したら、何かしらの不具合があると予測できるので、状況をまとめて次の試験に移る、後日タッチセンサ等の導通を確認し不具合のあるところを探し、修理する。
- 白線センサに白紙を接近させて接続されているポートの出力が1であるか確認する、もしも失敗したら白線センサの可変抵抗の値を調整し再試験する、
- 白線センサとタッチセンサの接続ポートを別のポートに差し替え再試験をする、白線センサはDB_IO1から8タッチセンサはDB_TS1から4まで全て試験する。
参考ページ
チェックシートは、仕様書の部品表を印刷したものを用い確認した部品に印をつける。
チェックの手順
もしも仕様と異なる場合は、はんだごて、はんだ、はんだ吸い取り線を使用し部品を規定の位置に付け直す。また、修正不可能なら作り直す。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
(例:J3ms104_FPGA_C3のA4とMOTOR_Lの2が導通しているかテスターを用いて確認する)、各部品が正しくつながっているかを確認、またVccとGNDが短絡していないか確認。
チェックリストとしては印刷したパターン図を用い、導通が確認できたら印をつける。
もしも上の基準を満たさなければビニール線などで直接つなぐ。短絡していたらはんだを付け直すか、
接触部分をカッターで削る。修正不可能ならもう一度基板の削りだしを行う。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
 |
単体では動作確認を行うことができないので、ドーターボードにCPUボード、FPGAボード、白線センサ、タッチセンサ、電源ボード、安定化電源またはバッテリーを接続し試験を行う.
白線センサはMIRS標準機では使用しないが、ポートの動作試験を行うため使用する。
また試験には/home/mirs/src/mg3_std_program/testにあるirs_ts_ws_testを実行して行う、このプログラムは各On/Off I/Oセンサ1~12からの値を1秒ごと取得し、その値をディスプレ イに表示するプログラムであるので、 今回は出力が0 or 1の白線センサとタッチセンサが試験としてはやりやすいのでこれらとプログラムを用いて試験する。 具体的な試験方法としては
これらの手順を全てこなせば試験合格とする、また何かしら不具合があった場合報告書にまとめる。
MIRSMG3D 超音波センサボード試験仕様書
部品配置確認、導通試験の参考
モーター制御ボード
目的
モーター制御ボードが正常に動作するか確認し仕様どおり作成されているかを確かめる。
部品配置確認
MIRSMG3D 新モータコントロールボード製造仕様書を参照して作成したモータ制御ボードと実装図を照らしあわせ目視で確認する。- パターン図と比較しながら目視で部品の位置をチェックする。
- パターン図と比較しながら目視で部品の向きをチェックする。
導通試験
MIRSMG3D 新モーターコントロールボード回路図、
パターン図を参照して作成したモータ制御ボードと照らし合わせ、テスターを使用し各素子が繋がっているかとVccとGNDが短絡してないかを確認する。試験方法
試験方法に関してはMIRSMG3S 新モータボード動作確認手順書を参照する。参考ページ
チェックシートは、モーター制御ボード仕様書の部品表を印刷したものを用い確認した部品に印をつける。
チェックの手順
もしも仕様と異なる場合は、はんだごて、はんだ、はんだ吸い取り線を使用し部品を規定の位置に付け直す。また、修正不可能なら作り直す。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
チェックシートとしては印刷したパターン図を用い、導通が確認できたら印をつける。
もしも導通していなかったらビニール線などで直接つなぐ。短絡していたらはんだを付け直すか、接触部分をカッターで削る。修正不可能ならもう一度基板の削りだしを行う。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で短絡がないかつ導通していればが合格とする。
MIRSMG3D 超音波センサボード試験仕様書
部品配置確認、導通試験の参考
超音波センサボード
目的
超音波センサボードが正常に動作するか確認し、仕様どおり作成されているかを確かめる。
部品配置確認
MIRSMG3D 超音波センサボード製造仕様書を参照して作成した超音波制御ボードと 実装図を照らしあわせ目視で確認する。- パターン図と比較しながら目視で部品の位置をチェックする。
- パターン図と比較しながら目視で部品の向きをチェックする。向きがある部品はIC・電解コンデンサ・ダイオード・コネクタの4種類である。
導通試験
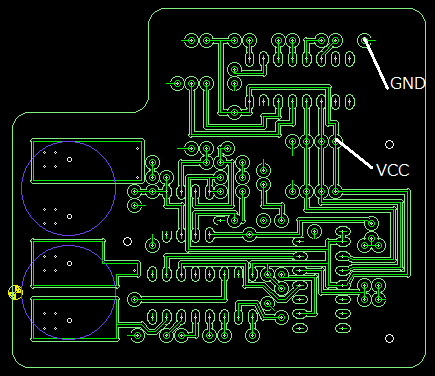
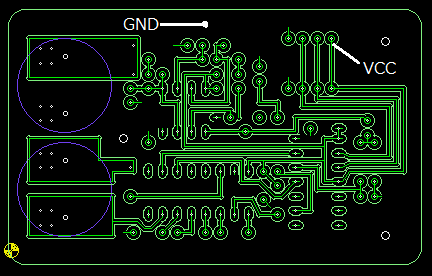
MIRSMG3D 超音波センサボード回路図、
パターン線図を参照して作成した超音波センサボードと回路図を照らし合わせ、テスターを使用しVccとGNDが短絡してないか、各部品が正しくつながっているかを確認する。試験方法
超音波距離計測試験プログラム の手順に従い親機、子機の順に計測する。- 超音波センサボード(親機)にCPUボード、FPGAボード、電源ボード、バッテリー or 安定化電源がすべて接続されていたら電源をいれる。子機の計測を行う際には親機と接続する。接続方法は MIRSMG3D 超音波センサボード取扱説明書を参照する。
- 超音波センサボードと板を、机から垂直に立て、平行におく、またボードからの距離は18cmとする。
- /home/mirs/src/mg3_std_programに移動する、またこのディレクトリ以下に標準プログラムのディレクトリ群がある。
- 標準プログラムがコンパイルされていなければ
- 実行ファイルuss_testを実行し、計測している超音波センサの識別番号が正しく設定されていることを確かめる。その後、ディスプレイに表示された距離を記録し実際の距離と比較する。
- 超音波センサチェックシートに沿250cmまで計測する。
- 遠ざけていくと超音波センサの測定距離の限界がくるはずである、超音波センサの測定可能距離の限界を超えると、
距離が測れなくなるするとディスプレイに9999が出力される、そのときの距離を記録する。 - 再び板の距離を18cmに戻す、また板とセンサとの角度を15°にし試験手順6を-45°、-30°、-15°、15°、30°、45°まで行う。
参考ページ
チェックシートは、仕様書の部品表を印刷したものを用い確認した部品に印をつける。
チェックの手順
もしも仕様と異なる場合は、はんだごて、はんだ、はんだ吸い取り線を使用し部品を規定の位置に付け直す。また、修正不可能なら作り直す。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
チェックシートとしては印刷したパターン図を用い、導通が確認できたら印をつける。
もしも導通していなかったらビニール線などで直接つなぐ。短絡していたらはんだを付け直すか、接触部分をカッターで削る。修正不可能ならもう一度基板の削りだしを行う。
確認に漏れが生じないよう製作担当と動作試験担当者のダブルチェックで行い全ての測定箇所で異常がない場合を合格とする。
パターン線図をFig3,Fig4に示す
 |
 |
試験には超音波センサ親機、超音波センサ子機、CPUボード、バッテリー or 安定化電源、メジャー使用する。
具体的試験手順としては
$ make
でコンパイルする詳しくは MIRSMG3D標準プログラムパッケージを参照
また測定したデータは、プログラムで誤差を補正するときなどに役に立つので保存しておく。
MIRSMG3D 超音波センサボード試験仕様書
部品配置確認、導通試験の参考
MIRSMG3D 超音波距離計測試験プログラム
MIRS1303 標準ボード試験計画書
動作試験方法の参考にした。