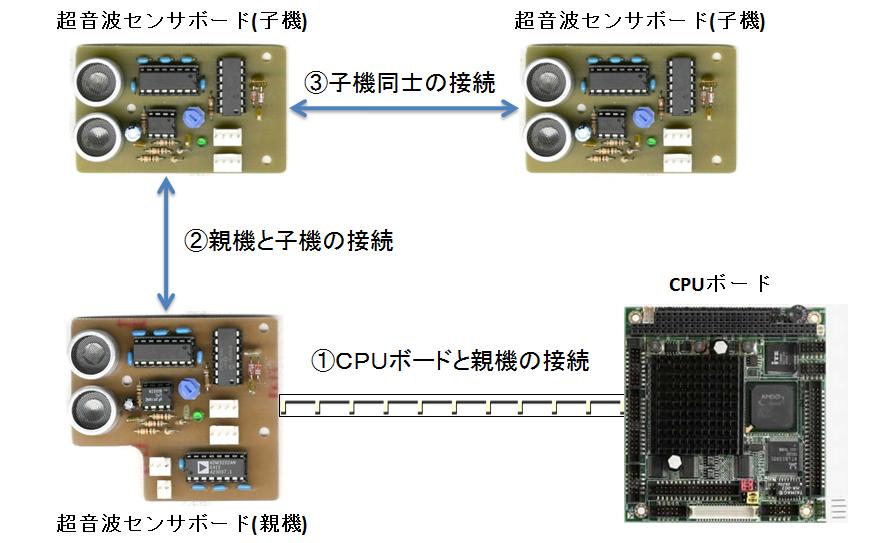
2.機能説明
- 超音波送信回路 (図1-ⅰ)
超音波の送信を行う部分。送信信号をシリアル通信ドライバーを使って増幅している。 - 超音波受信回路 (図1-ⅱ)
跳ね返ってきた超音波を受信する部分。受信した超音波はOPアンプで増幅され、ダイオードとlow pass filterによって包絡線検波が行われる。包絡線検波により整形された信号は、PICに送られ超音波を受信したことを知らせる。 - シリアル通信部 (図1-ⅲ)
シリアル通信を行う部分。シリアル通信の信号フォーマットは図2のようになっている。送信時にはデータビットに距離データをセットし送信を行う。また、受信時にはデータビットに識別コードがセットされており、自分の識別コードと等しい時にだけ距離計測を行う。
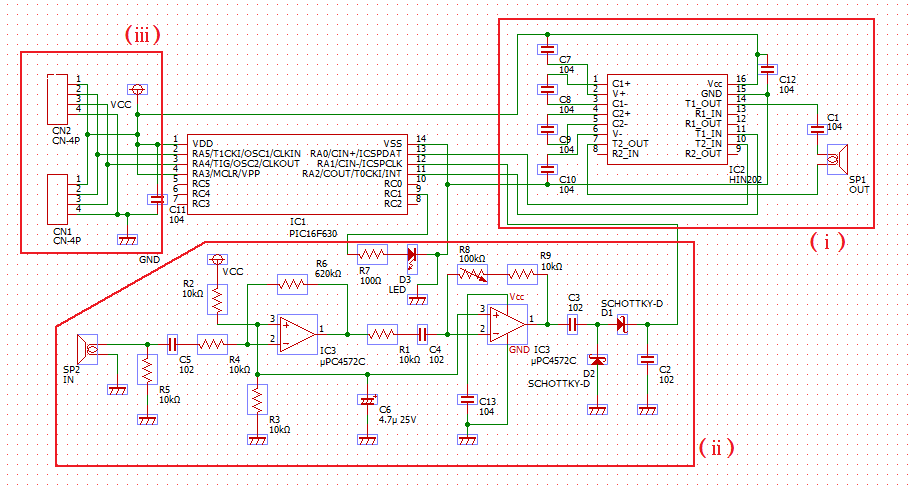
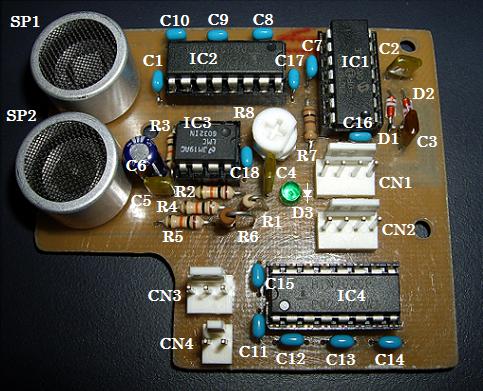
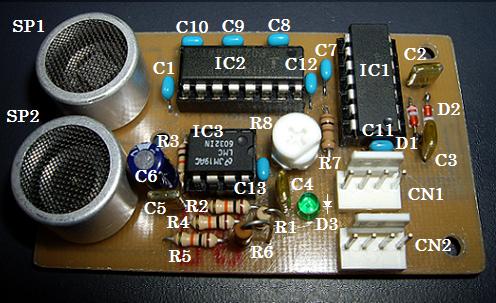
図1:超音波センサボード回路図
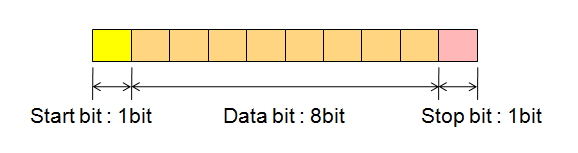
図2:シリアル通信信号フォーマット