※関連文書
MIRS1204 電源ボード試験仕様書
ただし、この試験結果はのちに述べる出力に負荷がかかった際の不具合について考慮していない試験結果である。
したがって基盤修復後の試験結果はできておらず3.1.1~3.1.3の試験結果と違いがある場合が考えられる。
また、電源ボードに関しては基盤の劣化のため今後同様の不具合が起こると考えられるため、現在のボード予備とし、実際の競技会までに新規に電源ボードを作成することを検討している。
3.1.1 部品配置チェック-
作業手順
実装図(MIRSSTND-ELEC-0022) と基板を比較し、表2.1.1に示す既定の部品がすべて実装されていることを目視で確認する。
ただし、2pinコネクタに関しては標準部品からジャックへと変更されていることを確認している。
部品チェック表
記号 品名 規格 数量 確認 -- PCB片面基板 11cm x 8cm 以上 1 ○ IC1,IC2 低損失レギュレータ LT1083CP 各1 ○ C1 積層セラミックコンデンサ 334 2 ○ C2 電解コンデンサ 4.7μF/25V 2 ○ R1 抵抗 390Ω 2 ○ R2 抵抗 2kΩ 1 ○ R3 抵抗 5.6kΩ 1 ○ R4 抵抗 510Ω 1 ○ R5 抵抗 2kΩ 1 ○ SW1 スイッチ UB-16SKP1R(NKK) 1 ○ SW2 スイッチ UB-16SKP1M(NKK) 1 ○ SW1L スイッチレンズ AT-4075R(NKK) 1 ○ SW2L スイッチレンズ AT-4075M(NKK) 1 ○ H1,H2 レギュレータ用放熱版 T220R41-25(水谷) 各1 ○ CN1,CN2,CN3,CN4 2ピンコネクタ 53258-0220(MOLEX) 各1 ○
表2.1.1 電源ボードの部品表
目視での確認の結果すべての部品が実装されていることを確認した。
- 3.1.2 導通チェック
-
作業手順
パターン図、回路図 に次のように番号を振る。
導通チェックシートを元に、回路図の①~⑪において、導通、絶縁している箇所が適切か、テスタを用いたチェックを行う。
VccとGNDが短絡していると、そこに大電流が流れてしまい非常に危険なので、特に注意してチェックする。
もし断線している箇所、漏電が起こっている箇所が確認できたら、修復可能な場合は修復し、不可能な場合は基板を作り直す。
番号を振った箇所同士で導通チェックを行った。
チェック結果
導通チェックシートを参照。
チェックシートより
- 青の部分は同一回路上の配線であり、導通していることが確認できた。
- 赤の部分については、以下のように絶縁の原因が明らかであるので問題なし。
- 黄枠:三端子レギュレータのADJの影響により抵抗が大きくなってしまっている。
- 緑枠:回路がそれぞれ独立していることが原因であると考えられる。
- 黄緑枠:コンデンサや回路上の絶縁が原因であると考えられる。
- 黄枠:三端子レギュレータのADJの影響により抵抗が大きくなってしまっている。
以上の結果から、回路の導通に関して問題はないものとする。
- 青の部分は同一回路上の配線であり、導通していることが確認できた。
3.1.3 動作試験-
- 制御系電源の試験
試験はcn1への定格電圧7.8Vバッテリーによる入力電圧の誤差を考慮し(※)、 入力電圧6~8.5[V]の範囲での出力電圧を測定した。 - 駆動系電源の試験
試験はcn3への定格電圧7.8Vバッテリーによる入力電圧の誤差を考慮し(※)、 入力電圧6~8.5[V]の範囲での出力電圧を測定した。
チェック結果
今回の動作試験では、負荷をかけない無負荷試験のみを行った。
それぞれの結果は電圧変化チェックシートを参照。
試験結果に従い、出力先の許容範囲を考慮して検査の合否を判定する。
- 制御系電源に関しては、試験で確認した入力電圧の範囲全体で合格基準を満たしていることを確認した。
- 駆動系電源では、6.77[V]未満の入力電圧に対して合格基準となる6.1[V]以上の電圧を確認できなかったため、入力電圧6.8[V]~8.5[V]の範囲を許容誤差とする。
また、今回の試験で安定化電源から入力端子までの線路で電圧の損失が確認できた。これについての考察も電圧変化チェックシートに記載する。
大まかに電源損失は(電源損失)=0.028exp(0.2902(電源電圧))で電源電圧に比例して大きくなることが確認できた。
安定化電源からの電圧供給の際には8.1[V]以上の出力がない場合,電源ボードへの入力は定格電圧を満たさない場合がある。
追記:
標準機OSを実際に起動した際に頻繁に電源が落ち、FPGAボードのダウンロードが失敗する不具合が起こり追加で試験を行った。
オシロスコープによる波形測定の結果、負荷のかかった制御系電源の回路中で周期的な漏電が起こり出力電圧が安定しないことが原因であることが分かった。
不具合が見つからなかった原因として回路中の短絡についてはテスターで検査していたが、テスターと電源装置とでは出力電圧に大きな差があるため回路中に高電圧がかかる際の漏電の有無はテスターでは確認できなかった。
しかし、漏電の原因として基盤自体の劣化、個々の部品の故障が考えられるため、対策として基盤の溝の削り直し、各部品の交換を行った。
この作業の中で、レギュレータとスイッチに主な原因があることが確認でき、これらの部品の交換で問題点は改善された。
状態1:不具合状態
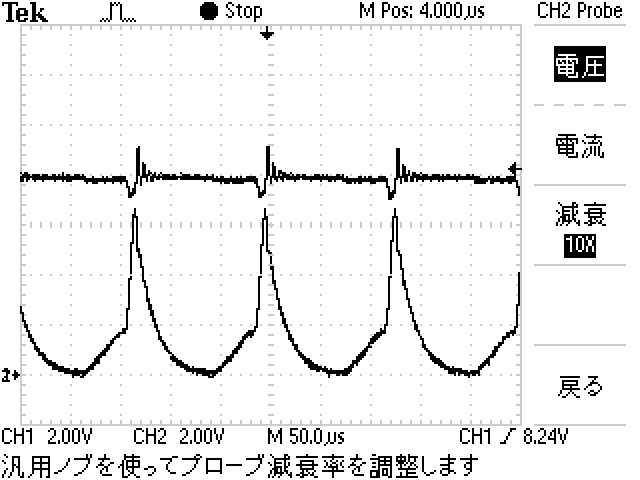
上:安定化電源からの供給電圧。下:電源ボードからの出力電圧
電源ボードの出力電圧が極端に低下するため、OSへの供給が不十分となり、電源が頻繁に落ちる原因となっていた。
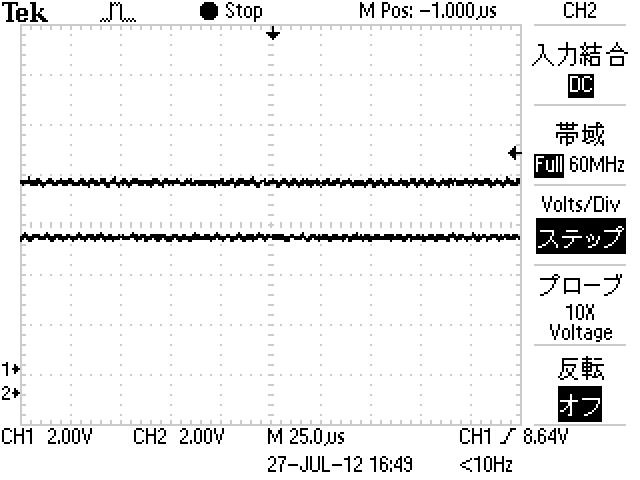
状態2:3端子レギュレータ交換後
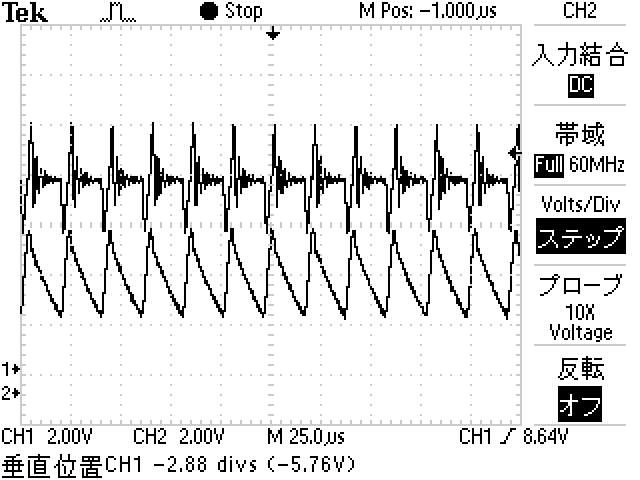
上:安定化電源からの供給電圧。下:電源ボードからの出力電圧
もっとも原因である可能性が大きいと考えていた3端子レギュレータの交換後波形は改善されたが標準機の波形と比べるとまだ電圧が低い。
状態3:スイッチ交換後
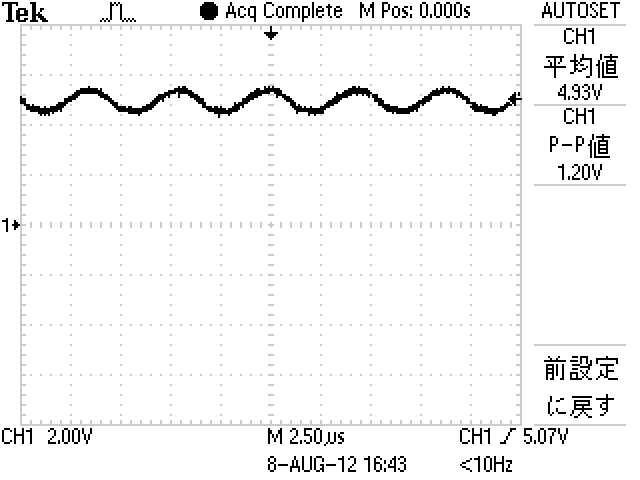
波形を確認することが目的であるため電源ボードからの出力波形のみを表示する。
今回の不具合の主な原因となっていたと考えられるスイッチの交換後、標準機と同様の波形が得られ、電圧供給も安定した。
補足:出力波形について
上:安定化電源からの供給電圧。下:電源ボードからの出力電圧
電源ボードからの出力波形について補足する。電圧波形についてはpp値に差があり電圧が低い場合には規格を満たさない場合があるのではないかと考えられるが、実際には上図のように極めて周期の短い波であるため、電源ボードから供給される電圧は一定であると考えらえる。
詳細は不具合報告書を参照。
- 制御系電源の試験
- 3.2.1 部品配置チェック
-
チェック結果
実装図と基盤を比較し、以下を確認した。
- ICの向きと位置 良好
- ラダー抵抗の向きと位置 良好
- ソケットの向きと位置 良好
- ジャンパ線 良好
- 目視によりすべての部品が正しく配置されていること ※良好
※ 部品表へチェック印をつける。
※ 誤実装ではない変更点については同等の機能を有することを確認した。
- ICの向きと位置 良好
- 3.2.2 導通試験
-
チェック結果
ドータボード導通試験チェックシート
- 2回とも○ならパス
- 2回とも×なら部品を付け直す
- 1回×なら再チェックし、上の判断基準で再判断
チェックシートにより、すべての素子が導通していることを確認した。
- 2回とも○ならパス
- 3.2.3 動作試験
-
On/Off I/Oデータ取得試験プログラムを用いて行った。
これを用い、タッチセンサ、白線センサの値を正しく読み取ってCPUに伝えられるかを試験することで、ドータボードの動作を確認した。
チェック結果
ドータボード動作試験チェックシートを参照。
チェックシートより、TS2はタッチセンサの入出力を正しくCPUに伝えられないことを確認した。
過去のドキュメントを調査した結果、I/Oデータ取得試験プログラムでは、TS2を認識しないバグがあることが分かった。よって、TS2に問題があるかどうかのチェックは見送る。
そのため、実装ではTS2の使用はできるだけ避け、接続する場合に改めて動作を確かめる。
また、それ以外のすべてのポートは、白線センサおよびタッチセンサの入出力を正しくCPUに伝えられている。
※ 試験手順は以下の通り
- ドータボードに何のセンサーも接続せずに、実行ファイルirs_ts_ws_testを実行し、I/O[1~8]、TS[1~4]のすべてが1であることを確かめる。
- ドータボード回路図 の下段のDB_IO1に白線センサ、上段のDB_TS1にタッチセンサを接続する。
- 白い紙などを白線センサに近づけたり遠ざけたりして、I/O[1]が1と0を繰り返すことを確認する。
また、タッチセンサをつけたり離したりして、TS[1]が1と0を繰り返すことを確認する。 - 白線センサはDB_IO1~8、タッチセンサはDB_TS1~4のすべてについて、3.と同様の操作をし、その動作を確認する。
- 3.3.1 試験の中断とデバックへの移行
-
導通チェックが完了した段階でモーターを動かそうと試みたが、モーターは動かなかった。
試験はモーターとロータリーエンコーダが正常に動作するか試すためのものなので、正常に動作しなかった時点で試験を中断し、 デバック(動かない原因の調査)に移行することとした。
以下にデバックの詳細を示す。
MTCBデバック詳細.docx
以下に今回作成したerror-reportを示す。
7月20日error-report.docx
8月9日error-report.docx
8月10日error-report.docx
- 3.3.2 デバック後の結果
-
新しい基盤を作ることによって、体験入学でMIRS標準機のモーター、ロータリーエンコーダを正常に動作させることに成功した。
以下にMTCBが正常に動作しなかった原因を示す。
- 電源ボードから供給される電圧が足りなかった
- 接触不良
- 素子を間違えた
- 基盤が劣化していた
- 電源ボードから供給される電圧が足りなかった
- 3.4.1 部品のチェック
-
※チェック手順
- 作成した超音波センサボードと実装図を照らし合わせ、部品の位置をチェックする。
もし、間違っていたら、はんだ吸い取り器などで部品を外し修正を行う。 - 製作した超音波センサボードと実装図を照らし合わせて、部品の向きをチェックする。
向きがある部品はIC・電解コンデンサ・ダイオード・コネクタの4種類である。
もし、間違っていたら、はんだ吸い取り器などで部品を外し修正を行う。
チェック結果
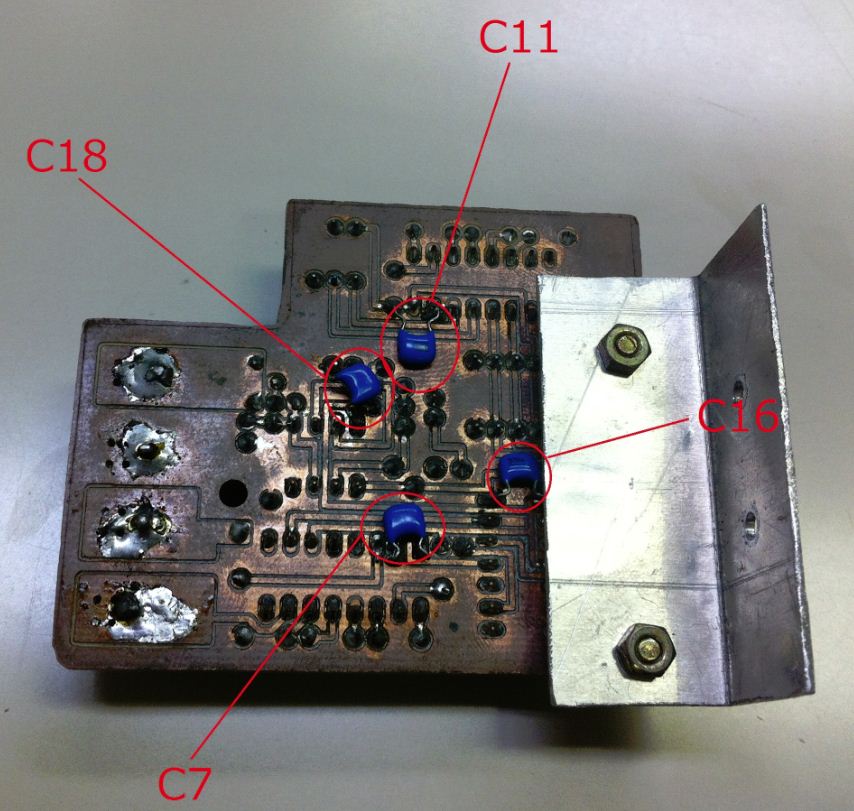
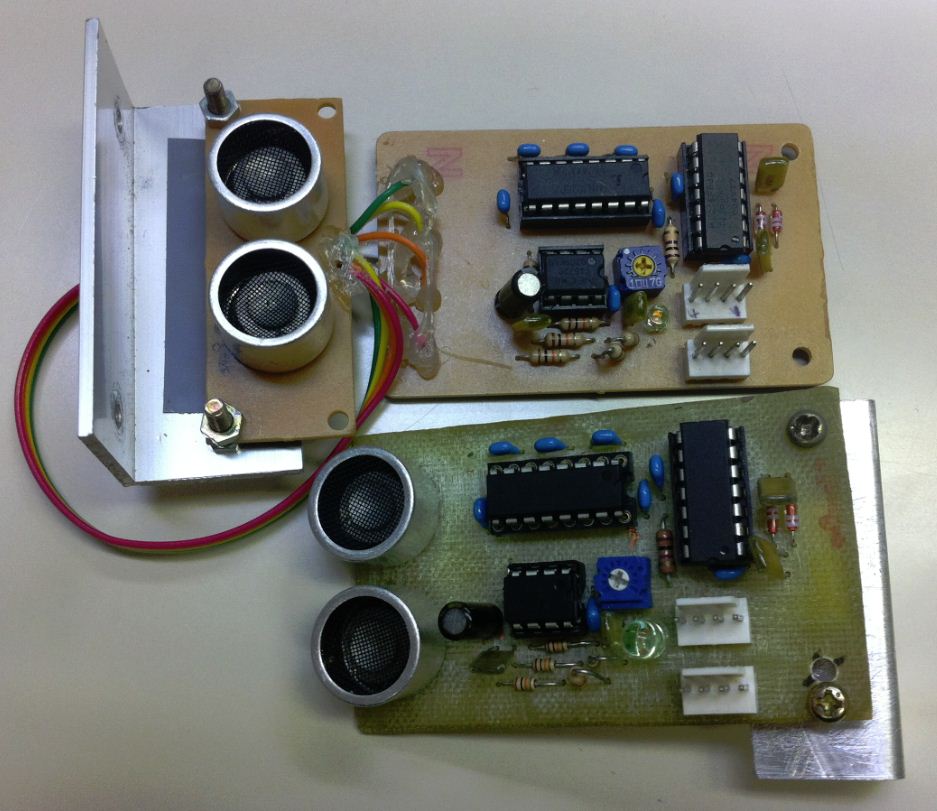
標準超音波センサの部品写真と、MIRS1101のMIRSを見比べた。
子機は2機とも、実装図との違いは見られなかった。
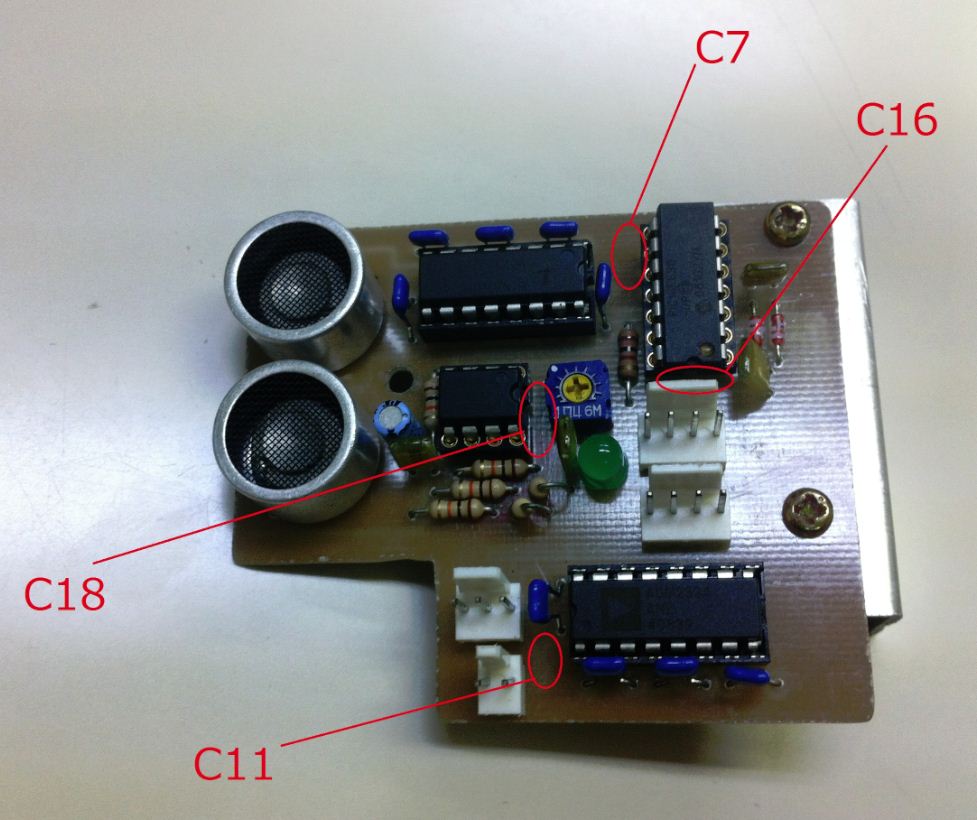
親機は、一部のコンデンサ(C7,C11,C18,C16)、が裏に取り付けられていたこと以外には変化が見られなかった。
以上より、部品の欠損等は認められないため部品のチェックは合格とする
- 作成した超音波センサボードと実装図を照らし合わせ、部品の位置をチェックする。
- 3.4.2 導通チェック
-
※チェック手順
- 作成した超音波センサボードと回路図を照らし合わせ、各部品が正しくつながっているか調べる。
もし、つながっていなければ、ビニール線などで直接つなぐ。あまりにひどい場合は、もう一度基盤の削りだしを行う。 - 製作した超音波センサボードと回路図を照らし合わせ、つながってはいけない所を調べる。
もし、つながっていればはんだを付け直すか、接触部分をカッターで削る。あまりにひどい場合は、もう一度基盤の削りだしを行う。
チェック結果
過去に使用されていたボードのため、信頼に足ると判断し省略した。
もしも、動作試験で適切に動かなかった場合、この試験項目を再試験することにした。
- 作成した超音波センサボードと回路図を照らし合わせ、各部品が正しくつながっているか調べる。
- 3.4.3 動作試験
-
動作試験には超音波距離計測試験プログラムを用いた。
チェック結果
- 準備
CPUボードと超音波センサボードを接続し、電源ボードからCPUボードと超音波センサボードに電力を供給した。 電源は直流安定化電源で8Vに設定した。
直線距離で2mまで確保し、その表面はなめらかであること、壁までに障害物がないことを確認した。 また、壁と超音波センサは平行になるようにした。
CentOSを起動し、USS_testプログラムを起動した。
- 検査
親機と壁を垂直に設置し、板との間隔を5cm、10cm、20cm、50cm、75cm、100cm、200cmへと徐々に変更して検査した。
出力された値を記録した。
- 結果
以下に結果を示す。(excelデータにリンクを貼る)
超音波センサ動作チェックシート
親機は、壁と平行に板を置いた際は正確に距離を測定した。
規格上では測定できるか不明である260cm程まで測定することができた。 また、壁と板との角度を±30°まで正確に測定することができた。
子機は最初、正確な値を返さなかったが可変抵抗を調整することで、正確な値が返ってくるようになった。
また、板の床とがなす角度により、不安定になることがあった。mirs制作の際は超音波を設置する際の角度に注意する必要があると思われる。
結果の表より、誤差が5%以下に収まっているので試験は合格とする。
- 準備