偼偠傔偵
杮僪僉儏儊儞僩偼丄MIRS1402偺昗弨晹昳帋尡曽朄偵偮偄偰婰偟偨僪僉儏儊儞僩偱偁傞丅
帋尡崁栚
帋尡傪峴偆懳徾丄帋尡崁栚丄嶌嬈偡傞恖悢偲偐偐傞帪娫偺梊憐, 扴摉幰丄帋尡梊掕擔,惢嶌姰椆梊掕擔 傪帵偡丅
| 帋尡懳徾 | 帋尡崁栚 | 嶌嬈恖悢, 帪娫偺梊憐 | 扴摉幰 | 帋尡梊掕擔 | 惢嶌姰椆梊掕擔 | 旛峫 |
|---|---|---|---|---|---|---|
| 揹尮儃乕僪 |
| 丂丂丂丂丂1恖丂0.5帪娫 丂丂丂丂丂1恖丂1帪娫 丂丂丂丂丂2恖丂1帪娫 | 懢揷丄杚揷 | 6/13 | 5/30 | 夁嫀偺婎斅傪巊梡 |
| 儌乕僞乕惂屼儃乕僪(2枃) |
| 丂丂丂丂丂2恖丂0.5帪娫 丂丂丂丂丂2恖丂1帪娫 丂丂丂丂丂2恖丂1帪娫 | 壛摗丄摗尨 | 6/20 | 5/30 | 怴偟偔嶌惉偡傞 |
| 挻壒攇僙儞僒儃乕僪(恊婡1偮,巕婡3偮) |
| 丂丂丂丂丂2恖丂0.5帪娫 丂丂丂丂丂2恖丂1帪娫 丂丂丂丂丂2恖丂1帪娫 | 烴堜, 摗尨 | 6/27 | 5/30 | 夁嫀偺婎斅傪巊梡 |
| 働乕僽儖 |
|
帋尡曽朄
帋尡撪梕
晹昳攝抲妋擣偲摫捠帋尡偲摦嶌帋尡傪峴偆丅
帋尡慡斒
帋尡懳徾偺屘忈傪偼傫偩偛偰摍偱廋惓偟偨応崌偼丄寢壥偑曄傢傞壜擻惈偺偁傞帋尡傪慡偰傗傝捈偡丅
僠僃僢僋僔乕僩偼奺帋尡偱梡堄偡傞丅
徻嵶側悢抣(挷傋傞揹埑側偳)偼丄巇條彂攝晍屻偵捛壛偱婰偡丅
晹昳攝抲妋擣慡斒
懳徾偺儃乕僪偲巇條彂偺幚憰恾傪徠傜偟偁傢偣丄晹昳偑惓偟偔幚憰偝傟偰偄傞偙偲傪妋擣偡傞丅
娫堘偄傪妋擣偟偨応崌偼丄廋惓偡傞丅
偼傫偩偵傛傞廋惓偑晄壜擻側応崌偼婎斅傪嵞壛岺偡傞丅
岦偒偺偁傞慺巕(IC傗儔僟乕(廤崌)掞峈)偼摿偵拲堄偟偰妋擣偡傞丅
曄峏傗娫堘偄偺廋惓偑偁偭偨応崌丄僠僃僢僋僔乕僩偵昁偢婰擖偟偰偍偔丅
摫捠帋尡慡斒
偼傫偩晅偗偝傟偨慺巕偺懌偲摫慄偺娫偺摫捠丄Vcc-GND娫偺愨墢傪僥僗僞乕偱妋擣偡傞丅
傑偨丄揹尮嫙媼梡偺僐僱僋僞偺GND抂巕偲懠偺慡偰偺GND抂巕偺娫偺摫捠傕妋擣偡傞丅
掞峈抣偑20兌 埲壓偱偁傟偽摫捠丄10k兌 埲忋偱偁傟偽愨墢偲敾掕偡傞丅
乮側偍偙偺婎弨偼 MIRS1204 昗弨儃乕僪帋尡曬崘彂偱摫捠丄愨墢偲敾抐偝傟偨掞峈抣傪傕偲偵偟偰偄傞丅 乯
抐慄傗僔儑乕僩傪妋擣偟偨応崌偼丄廋惓偡傞丅
忋婰偺曽朄偱廋惓晄壜擻側応崌偼婎斅傪嶌惉偟側偍偡丅
摫捠帋尡偵崌奿偟偰偄側偄婎斅偼愨懳偵揹尮偵愙懕偟側偄丅
摦嶌帋尡慡斒
忋婰偺帋尡廔椆屻丄摦嶌傪妋擣偡傞丅
僠僃僢僋僔乕僩堦棗
晹昳攝抲妋擣僠僃僢僋僔乕僩
摦嶌帋尡僠僃僢僋僔乕僩
摫捠妋擣僠僃僢僋僔乕僩
揹尮儃乕僪
嶲峫帒椏
MIRSSTND 僨儏傾儖儗僊儏儗乕僞揹尮儃乕僪惢憿巇條彂, 庢埖愢柧彂
MIRS1204 昗弨儃乕僪帋尡曬崘彂
MIRS1301 昗弨儃乕僪帋尡曬崘彂
晹昳攝抲妋擣
揹夝僐儞僨儞僒偺岦偒偵拲堄偡傞丅
揹尮儃乕僪惢憿巇條彂偲僠僃僢僋僔乕僩傪嶲徠偟偰攝抲傪妋擣偡傞丅
摫捠帋尡
揹尮儃乕僪偺僷僞乕儞恾傪埲壓偵帵偡丅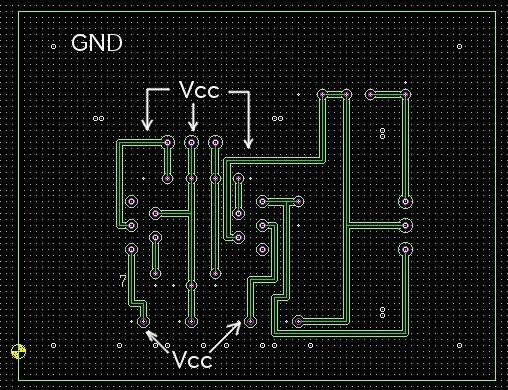
摦嶌帋尡
僶僢僥儕乕揹埑傪惂屼宯揹埑丄嬱摦宯揹埑偵曄姺壜擻偐妋擣偟丄巇條傪枮偨偟偰偄傞偐帋尡偡傞丅
擖椡揹埑偑掅壓偟偨偲偒(僶僢僥儕乕巆検偑彮側偔側偭偨偲偒傗丄楎壔偟偨偲偒)偺摦嶌傕妋擣偡傞偨傔丄擖椡揹埑偼曄壔偝偣偰挷傋傞丅偙偺憖嶌偺偨傔偵丄揹尮偼僶僢僥儕乕偱側偔埨掕壔揹尮傪巊梡偡傞丅
MIRS1204 昗弨儃乕僪帋尡曬崘彂 偱曬崘偝傟偰偄傞弌椡攇宍偺棎傟傪峫椂偟丄揹埑偺應掕偵偼僆僔儘僗僐乕僾傪巊梡偡傞丅
偙偺帋尡偼傎偐偺儃乕僪傪攋夡偟側偄偐妋偐傔傞偙偲傪庡栚揑偲偟偰偄傞丅
偦偺忋丄偙偺儃乕僪偼棳梡側偺偱丄CPU儃乕僪丄儌乕僞乕嬱摦帪偺揹埑應掕偼嵟掅尷偵梷偊丄婎杮揑偵柍晧壸帪偺揹埑傪應掕偡傞丅
偁偔傑偱嵟掅尷偱偁傝丄應掕偼偡傞丅偳偺掱搙應掕偡傞偐偼丄僠僃僢僋僔乕僩傪嶲徠丅
巊梡婍嬶
揹尮儃乕僪丄埨掕壔揹尮丄僆僔儘僗僐乕僾丄CPU儃乕僪丄儌乕僞乕惂屼宯揹尮偺帋尡庤弴
- 惂屼宯揹尮偺僗僀僢僠偑OFF偵側偭偰偄傞偙偲傪妋擣偡傞丅(DC僕儍僢僋傪帺暘偺曽偵岦偗偰塃懁偺僗僀僢僠)
- CN1偲CN2(2僺儞僐僱僋僞)偵僆僔儘僗僐乕僾偺僾儘乕僽傪愙懕偡傞丅僔儑乕僩偝偣側偄傛偆偵拲堄偡傞丅
- CN1偵埨掕壔揹尮傪愙懕偟丄弌椡揹埑傪6.0V偵愝掕偡傞丅
- 惂屼宯揹尮偺僗僀僢僠傪ON偵偡傞丅
- CN1偺揹埑傪6.0乣8.5V傑偱0.1V崗傒偱曄壔偝偣側偑傜丄CN2偵弌椡偝傟傞揹埑傪應掕偟婰榐偡傞丅
- 擖椡揹埑7.4V乣8.5V偵懳偟偰弌椡揹埑偺嵟戝抣偑5.1~5.6V偺斖埻撪偱偁傟偽師偵恑傓丅晄崌奿偩偭偨応崌偺懳張朄偼庤弴8偺壓偵婰偡丅
- CPU儃乕僪傪摦嶌偝偣偰偄傞忬懺偺弌椡揹埑傪應掕偡傞丅
堦扷僗僀僢僠傪OFF偵偟丄CPU儃乕僪傪CN2偵愙懕偟偰嵞搙揹尮傪搳擖丅
擖椡揹埑7.4V,8.5V偵懳偡傞弌椡揹埑傪婰榐偡傞丅 - CPU儃乕僪摦嶌帪偺弌椡揹埑偺暯嬒偑5.1V傪挻偊偰偄傟偽崌奿偲偡傞丅
偨偩偟丄暯嬒偑5.1V傪挻偊偰偄偰傕攇宍偺棎傟偑戝偒偔嵟彫抣偑4.5V傪壓夞傞応崌偼晄崌奿偲偡傞丅
晄崌奿偩偭偨応崌偺懳張朄偲偟偰偼丄婎斅偺峚傪僇僢僞乕側偳偱嶍傝側偍偡偙偲偲丄揹夝僐儞僨儞僒丄嶰抂巕儗僊儏儗乕僞丄僗僀僢僠側偳偺晹昳傪岎姺偡傞偙偲偑偁傞丅
嬱摦宯揹尮偺帋尡庤弴
- 嬱摦宯揹尮偺僗僀僢僠偑OFF偵側偭偰偄傞偙偲傪妋擣偡傞丅(DC僕儍僢僋傪帺暘偺曽偵岦偗偰嵍懁偺僗僀僢僠)
- CN3偲CN4偵僆僔儘僗僐乕僾偺僾儘乕僽傪愙懕偡傞丅偙偺偲偒僔儑乕僩偝偣側偄傛偆偵拲堄偡傞丅
- CN3偵擟堄揹埑敪惗憰抲傪愙懕偟丄弌椡揹埑傪6.0V偵愝掕偡傞丅
- 嬱摦宯揹尮偺僗僀僢僠傪ON偵偡傞丅
- CN3偺揹埑傪6.0乣8.5V傑偱0.1V崗傒偱曄壔偝偣側偑傜丄CN4偵弌椡偝傟傞揹埑傪應掕偡傞丅
- 擖椡揹埑7.4V乣8.5V偵懳偟偰弌椡揹埑偺嵟戝抣偑6.1~6.7V偺斖埻撪偱偁傟偽師偵恑傓丅晄崌奿偩偭偨応崌偺懳張朄偼庤弴8偺壓偵婰偡丅
- 儌乕僞乕傪嬱摦偝偣偰偄傞忬懺偺弌椡揹埑傪應掕偡傞丅
堦扷僗僀僢僠傪OFF偵偟丄儌乕僞乕傪CN4偵愙懕偟偰嵞搙揹尮傪搳擖丅
擖椡揹埑7.4V,8.5V偵懳偡傞弌椡揹埑傪婰榐偡傞丅 - 儌乕僞乕嬱摦帪偺弌椡揹埑偺暯嬒偑5.5V傪挻偊偰偄傟偽崌奿偲偡傞丅
偨偩偟丄暯嬒偑5.5V傪挻偊偰偄偰傕攇宍偺棎傟偑戝偒偔嵟彫抣偑5.1V傪壓夞傞応崌偼晄崌奿偲偡傞丅
晄崌奿偩偭偨応崌偺懳張朄偲偟偰偼丄婎斅偺峚傪僇僢僞乕側偳偱嶍傝側偍偡偙偲偲丄
揹夝僐儞僨儞僒丄嶰抂巕儗僊儏儗乕僞丄僗僀僢僠側偳偺晹昳傪岎姺偡傞偙偲偑偁傞丅
MIRSSTND 僨儏傾儖儗僊儏儗乕僞揹尮儃乕僪惢憿巇條彂, 庢埖愢柧彂
MIRS1204 昗弨儃乕僪帋尡曬崘彂
MIRS1301 昗弨儃乕僪帋尡曬崘彂
僪乕僞儃乕僪
晹昳攝抲妋擣
僐僱僋僞丄IC僜働僢僩丄儔僟乕掞峈偺岦偒偵拲堄偡傞丅
摫捠帋尡
埲壓偺儕儞僋愭傪嶲徠偟偰偍偙側偆丅 MIRSMG3D 僪乕僞乕儃乕僪帋尡巇條彂,
摦嶌帋尡
僪乕僞儃乕僪偼丄FPGA儃乕僪偺奼挘儃乕僪偱偁傞丅
ISA僶僗偲奺僙儞僒傪偮側偘傞偙偲偑偱偒傞丅 僪乕僞儃乕僪扨懱偱帋尡傪峴偆偙偲偼偱偒側偄偺偱丄摦嶌帋尡偼峴傢側偄丅