目的
本ドキュメントは、 MIRS1201 の解体手順について記したドキュメントである。
全体図
|
|
|
- 全体の大きさが標準機より小さくなっている。
- 初めから外されている状態のケーブルがあったため、接続先を実際に確認できないポートがいくつか存在する。
解体手順
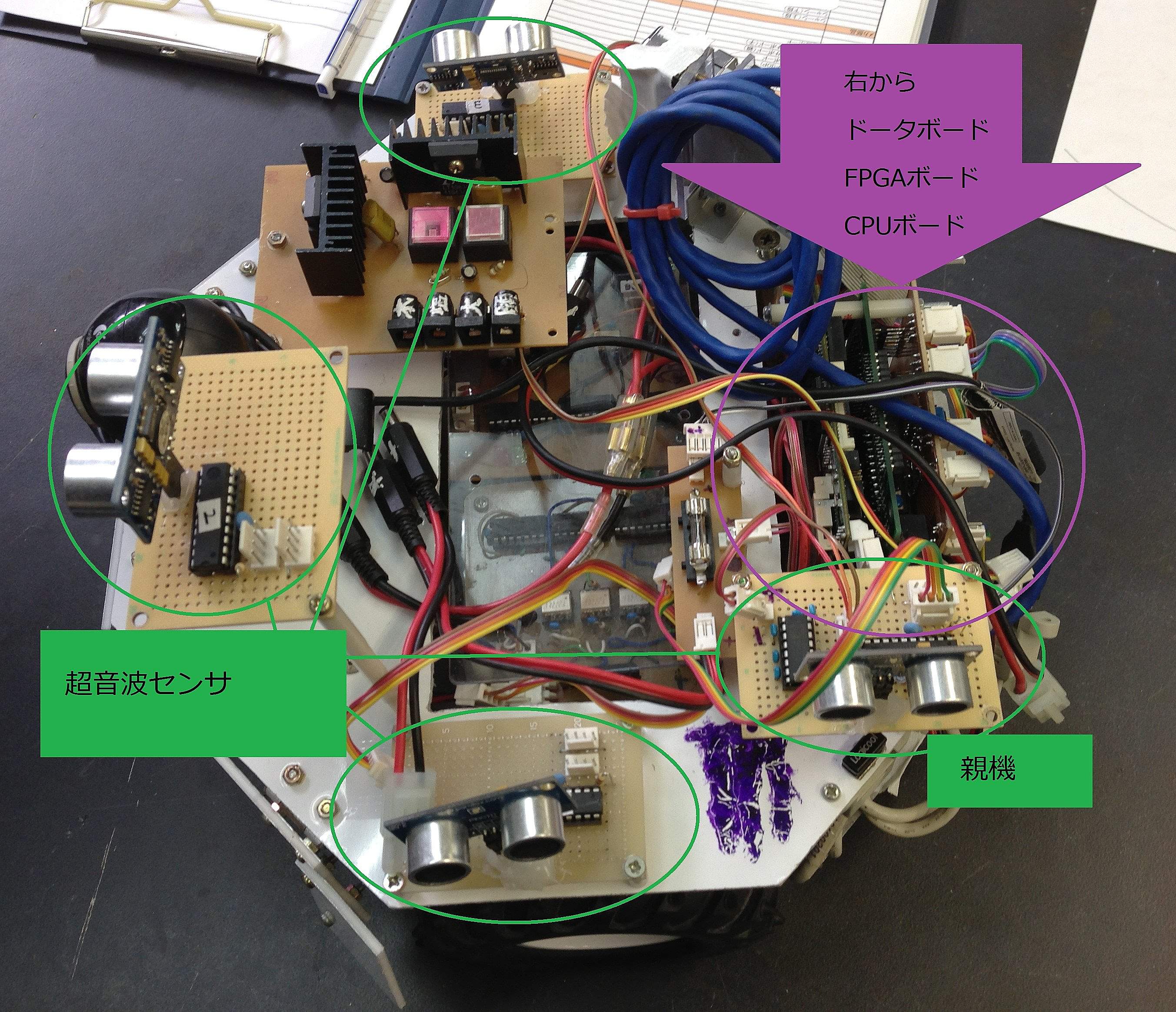
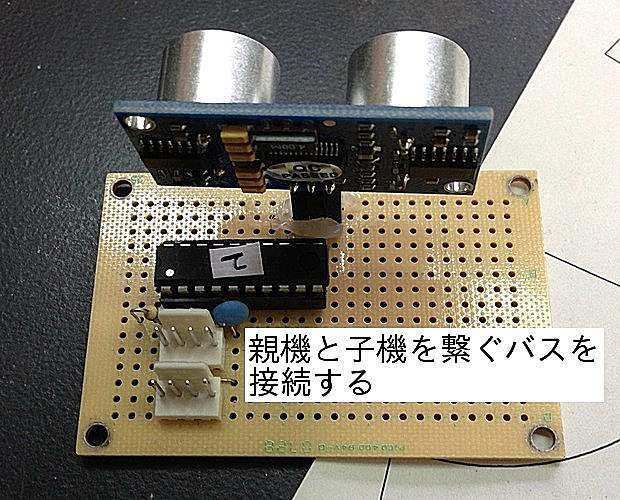
超音波センサーボード子機
MIRS1201 超音波センサ詳細設計書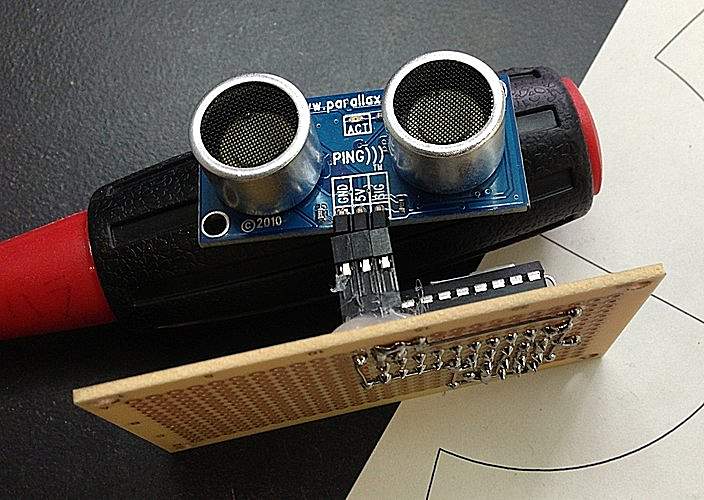
MIRS1201 システム提案書
MIRS1201 システム基本設計書
MIRS1201 SOFT詳細設計書
MIRSMG3D 超音波センサボード製造仕様書
- MIRS1201で新規に設計された基板である。
- 前方のボードは2箇所、左右のボードは4箇所をネジで上段シャーシに固定されていた。
- 親機を含め、すべての超音波センサーでパララックス社の超音波距離センサーモジュールが使用されている。
システム提案書を読むと、近距離まで測定するための変更であることが分かる。
近距離まで測定することの目的は明記されていないが、 センサーの取り付け位置に関する制限が減ることが利点として考えられる。
標準のセンサーの場合、壁までの距離を確保するために 機体側面より20cmほど内側に取り付ける必要があるからである。
- システム提案書を読むと、当初は前方用センサーのみ変更する予定であったことが分かる。
提案されていた取り付け方法では、機体外周部に設置される前方用以外は変更の必要が無かったためだと考えられる。
- 前方1枚と左右1枚ずつの合計3枚が取り付けられていた。ここで親機は左向きであるから左側のみ2枚となっている。
しかしその一方で、システム提案書の外観図より、当初は前方2枚と左右1枚ずつにすることを予定していたことが分かる。
したがって、開発途中で左側の壁との距離が重要視されるようになり冗長性を高めたと予想される。
SOFT詳細設計書によると小部屋攻略時は左側の壁に沿って走行することになっており、これが理由と考えられる。
- 子機に接続されていたケーブルは、初めから全て外されてしまっていた。
2つのコネクタに回路上の差が無い点とシステム基本設計書の「新規USSの概要」から、
親機と子機を繋ぐバスのためのケーブルが接続されていたことが分かる。
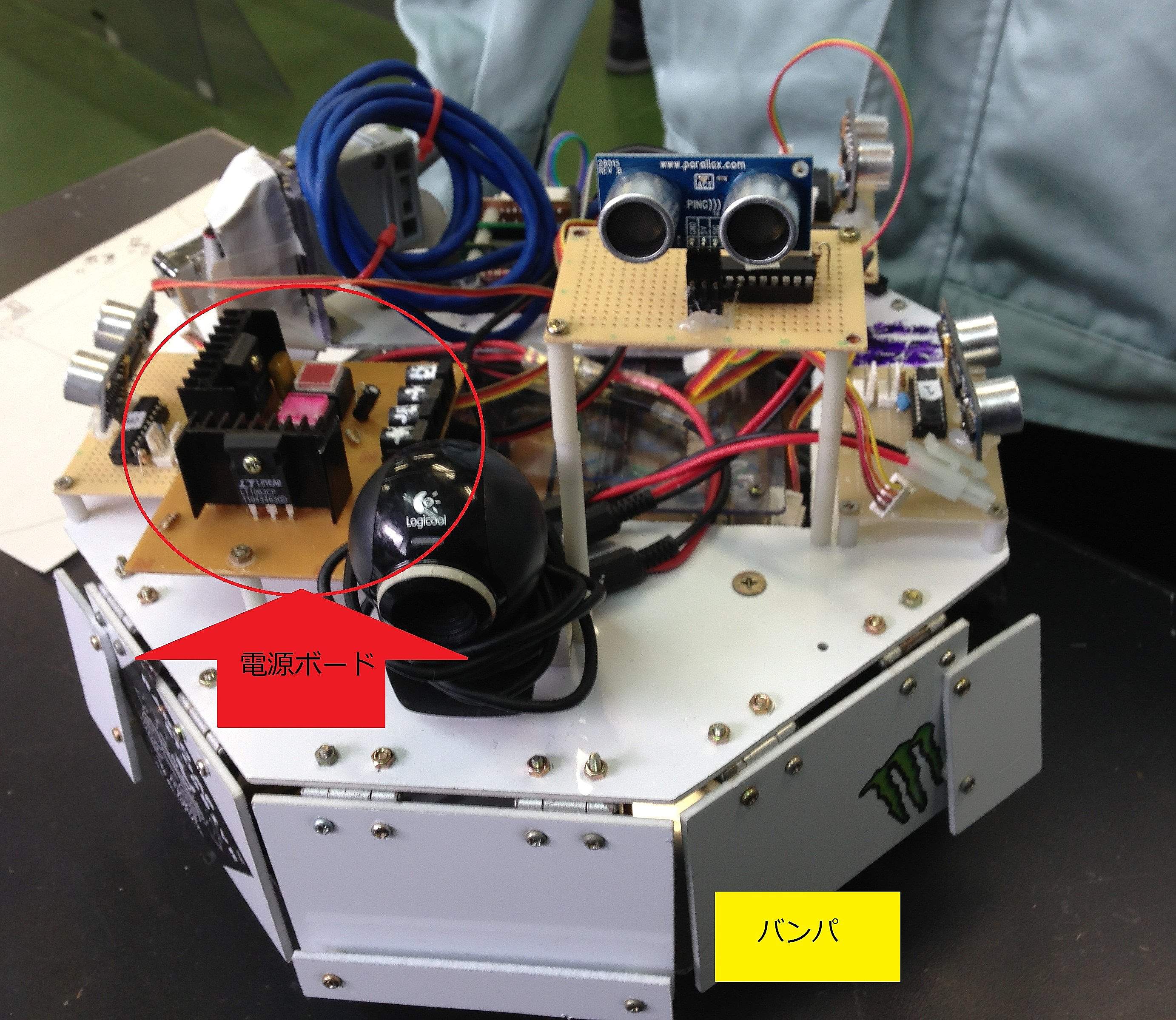
バンパー
MIRSMG3D バンパー製造仕様書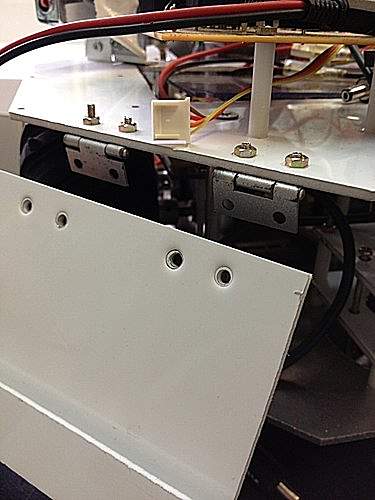
- MIRS1201で新規に設計されたバンパーである。設計書の類は見当たらなかった。
- 正面1枚、左右2枚の合計3枚が取り付けられていた。
- いずれも蝶番2つで上段シャーシに取り付けられていた。
- 全体の小型化に合わせて、バンパーも小型化されている。
- 素材も変更され、標準のアクリルからアルミ複合板に変更されている。
同じくアルミ複合板製に変更されたものに上段シャーシがあり、その目的は機体重量の軽減である。
しかし、元の素材がアルミ合金である上段シャーシと比較して、 バンパーをアルミ複合板製に変更しても重量軽減の効果は薄い。
バンパーに関しては重量軽減が目的では無いと考えられる。
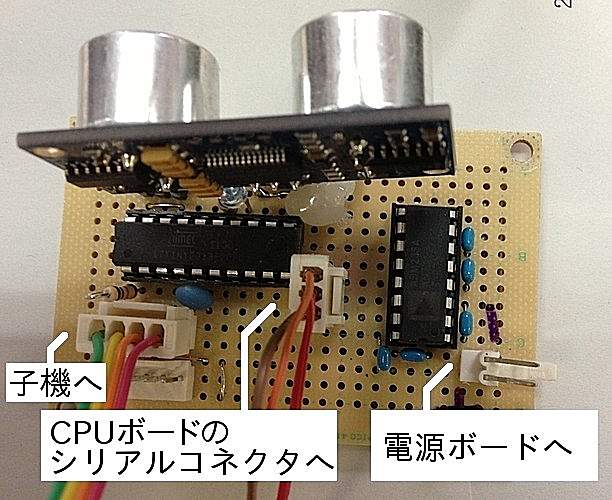
超音波センサーボード親機
MIRS1201 超音波センサ詳細設計書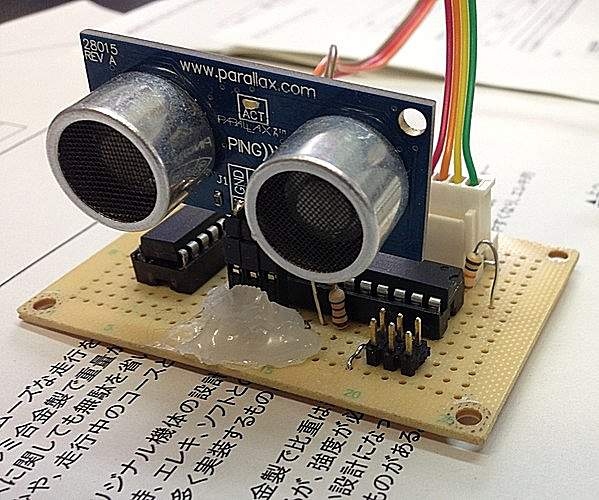
MIRSMG3D 超音波センサボード製造仕様書
- MIRS1201で新規に設計された基板である。
- 対角線上の2箇所をネジで固定されていた。
また、ナットは上下から挟むように2つずつ使用されていた。 - 2ピンのコネクタ : ヒューズの取り付けられた基板を介して電源ボードへ
- 3ピンのコネクタ : CPUボードのシリアルコネクタへ
- 4ピンのコネクタ : どこにも繋がっておらず、接続先を直接確認できていない。
しかし子機に接続するためのケーブルが他に無いため、親機と子機を繋ぐケーブルであると判断できる。
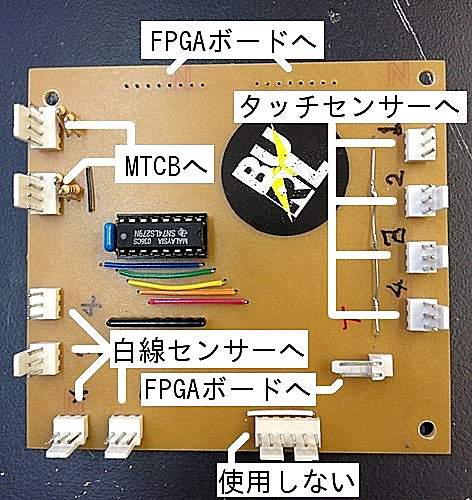
ヒューズの取り付けられた基板
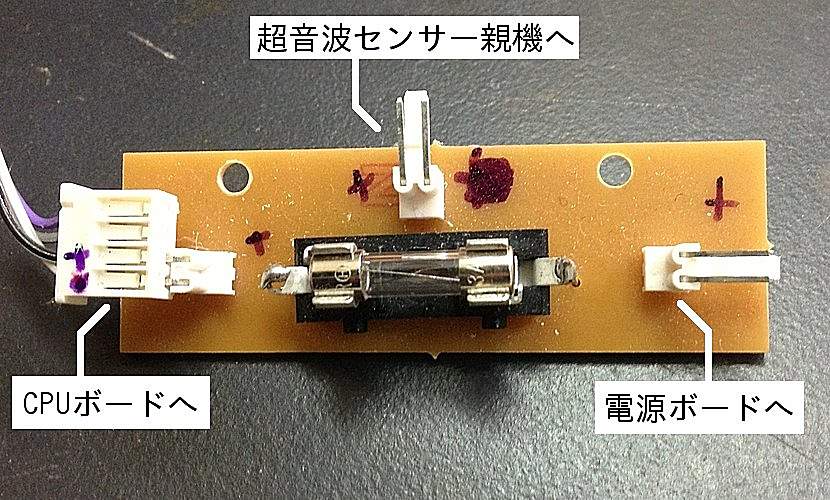
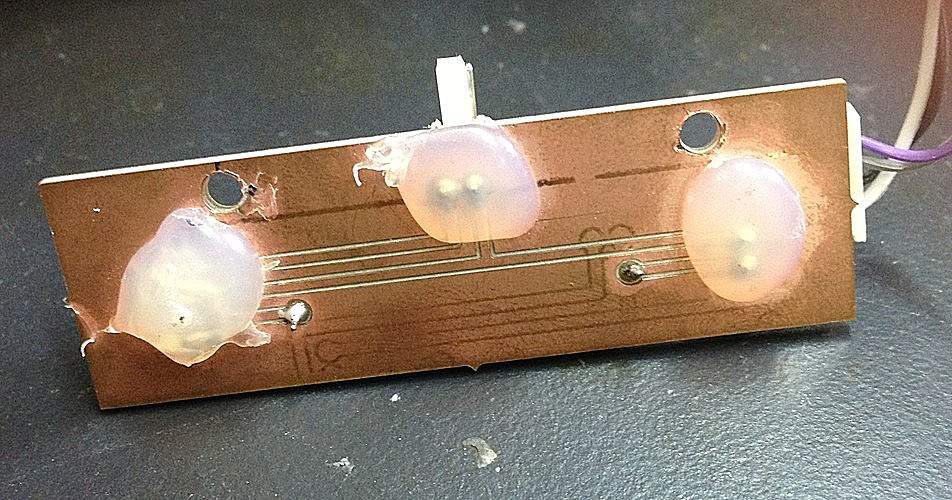
- MIRS1201で新規に設計された基板である。
- 電源ボードから、CPUボードと超音波センサー親機に電源を分配している。
- 2箇所をネジで固定されていた。 また、超音波センサー親機同様、1箇所につきナットが2つ使われていた。
- ヒューズを空中配線する場合に比べて接触不良等が起こりにくいことが設計目的であると考えられる。
電源ボード
MIRSSTND デュアルレギュレータ電源ボード製造仕様書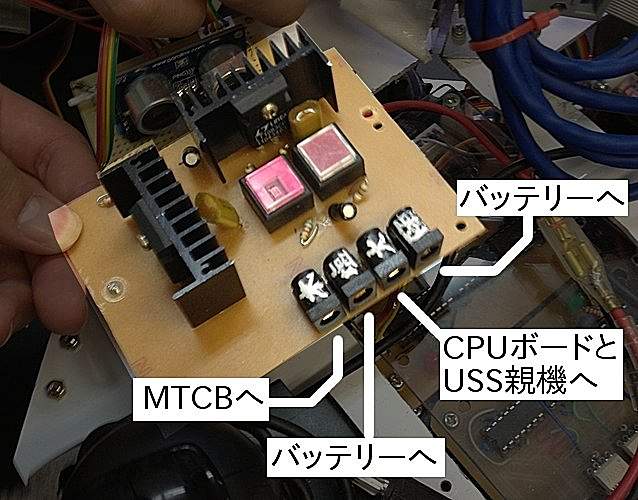
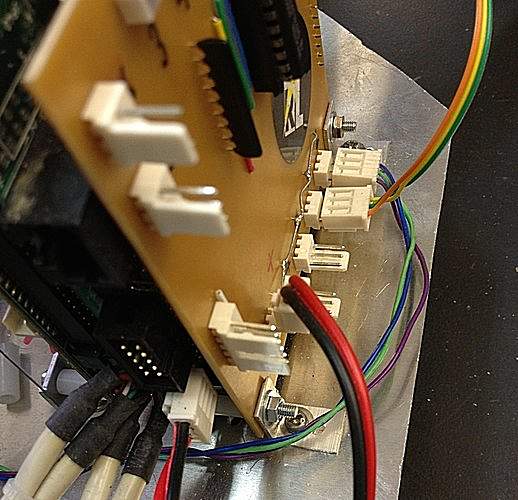
- 4つのコネクタがDCジャックに変更されている点以外は、MIRSMG3D標準の基板である。
- 2箇所をネジで固定されていた。
- DCジャックに書かれている文字は、それぞれ対応するケーブルに書かれた文字と対になっており、配線ミスを防止する目的が伺える。
ちなみにケーブル接続時には「戸本」「大塩」「東大」「単願」の4つの単語が現れる。
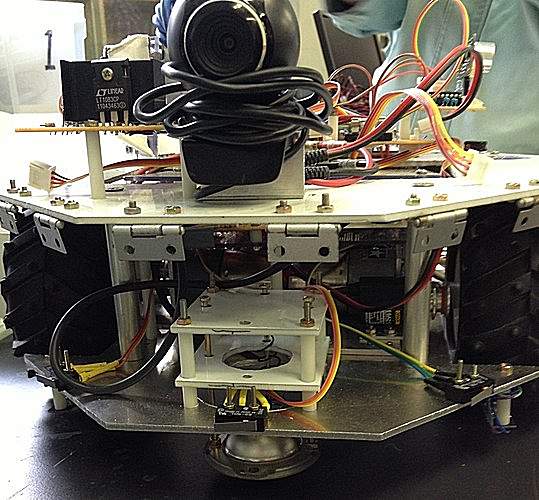
WEBカメラ
MIRSMG3D 部品表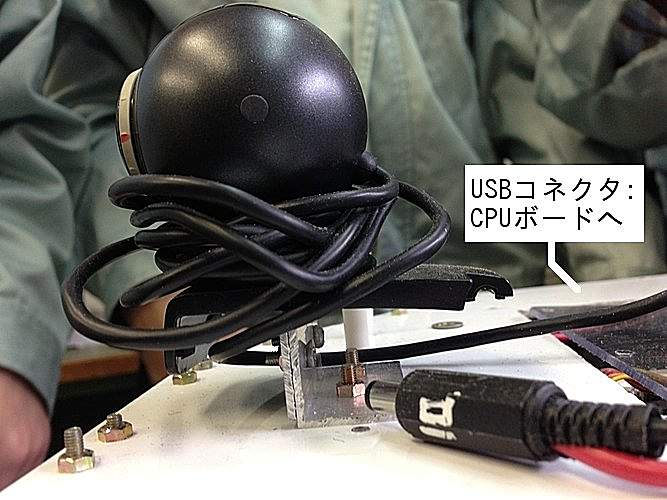
MIRSMG3D カメラ取り付け金具製造仕様書
- MIRSMG3D標準のセンサーである。
- 標準の金具で固定されていた。
- CPUボードにUSB接続されていた。
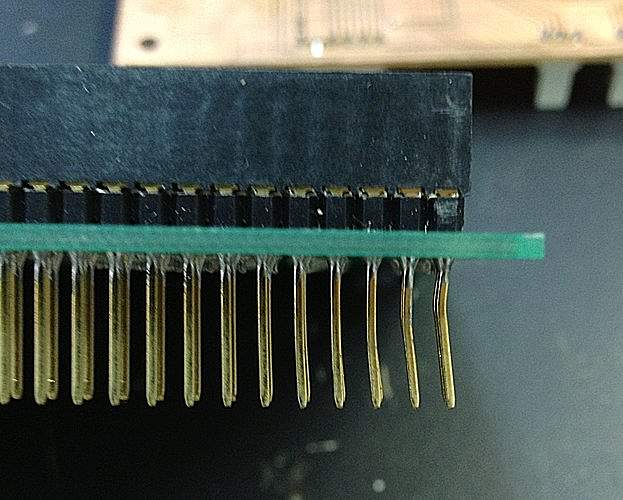
LPTコネクタとシリアルコネクタ
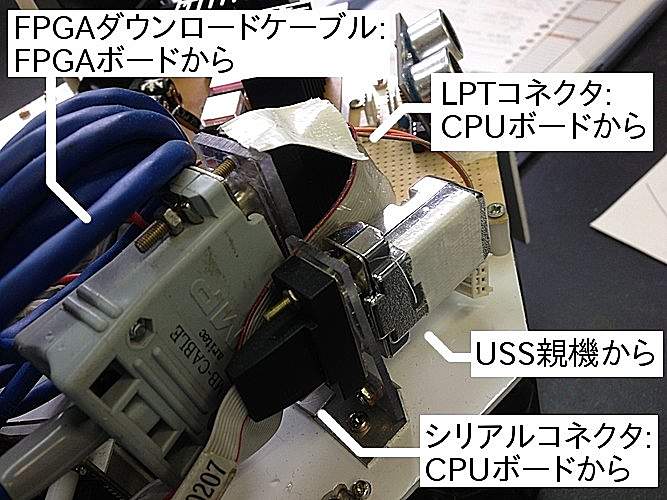
- LPTコネクタ(FPGAボード)とFPGAダウンロードケーブル(CPUボード)、
シリアルコネクタ(CPUボード)とUSS親機からのケーブルを接続している部分である。 - それぞれのコネクタは、L字の金具で固定されたアクリルのパネルに取り付けられていた。
- 使用されているアクリルのパネルは標準のものではない。また、仕様書は見当たらなかった。
- LPTコネクタ(FPGAボード)とFPGAダウンロードケーブル(CPUボード)、
USBコネクタとVGAコネクタ
MIRS1201 シャーシ詳細設計書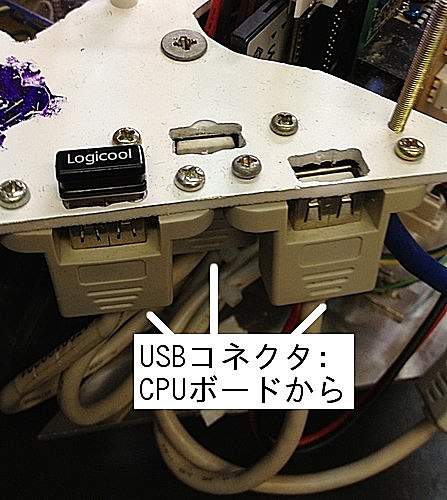

MIRSMG3D 各種ポート取付板製造仕様書
- USB,VGAコネクタは上段シャーシに直接取り付けられていた。そのため標準のパネルは使用されていない。
コネクタ周辺の構造を簡略化することで整備性を向上させるためだと考えられる。 - どちらもネジのみで固定されており、ナットは使用されていなかった。
- VGAコネクタを固定しているネジの山が削れてしまっていたため、取り外しに苦労した。
- USB,VGAコネクタは上段シャーシに直接取り付けられていた。そのため標準のパネルは使用されていない。
上段シャーシ
MIRS1201 シャーシ詳細設計書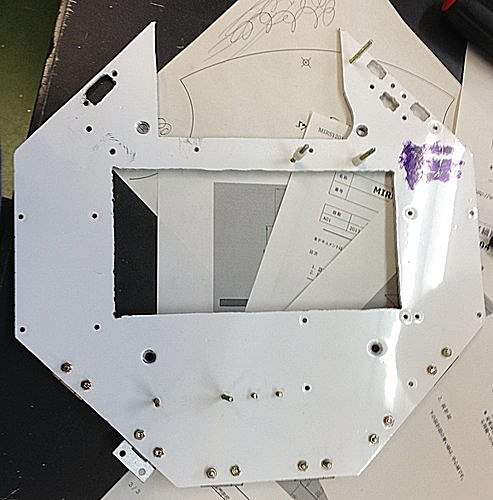
MIRS1201 システム提案書
MIRS1201 システム基本設計書
MIRSMG3D 上段シャーシ製造仕様書
- 上段シャーシはMIRS1201が新規に設計している。
- 4本の支柱(丸)で固定されていた。
- 標準のシャーシよりも小型化されている。
機体の軽量化や、走行時に壁に接触することを避けるための改良であることが、システム提案書から分かる。 - 素材もアルミ合金からアルミ複合板に変更されている。
素材がアルミ複合板であることはシャーシ詳細設計書からわかる。
こちらも機体の軽量化が目的であることがシステム提案書から分かる。
アルミ複合板がアルミ合金と比較して加工が容易であることも、素材の選択に影響していると考えられる。 - その他、中央に大きく穴が開けられている点が特徴的である。
これはモーターコントロールボード周辺の整備性向上を目的としたものであると考えられる。
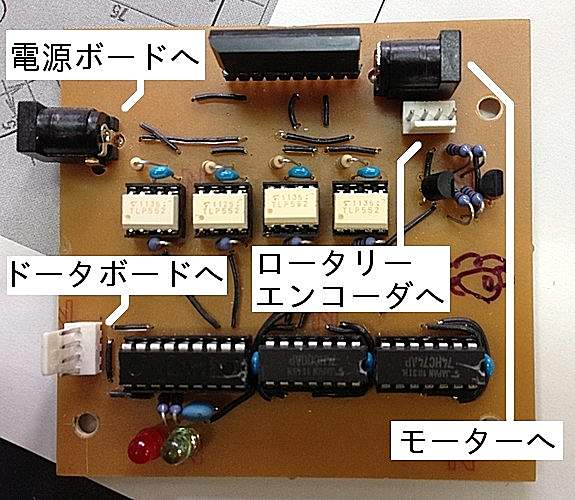
モーターコントロールボード
MIRS1201 ELEC詳細設計書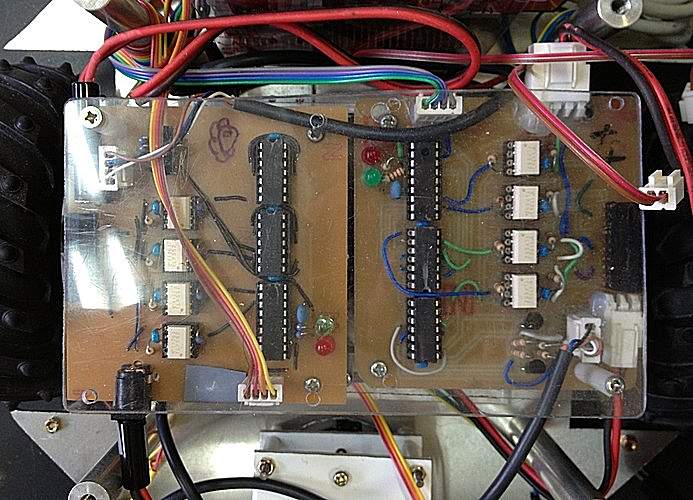
MIRS1201 システム提案書
MIRS1201 システム基本設計書
MIRSMG3D MTCB製造仕様書
- コネクタ2つがDCジャックに変更されている点以外は、MIRSMG3D標準の基板である。
- 上下をアクリル板で挟まれる形で、2枚のMTCBが横に並べられていた。
- システム提案書とシステム基本設計書によると、1枚の基板に統合して小型化する予定だったようである。
ELEC詳細設計書を見ると実際に1枚に統合した基板も制作されている。
ただし、回路上の変更は無く、2枚の基板を単純に連結した基板となっている。
この変更が適用されなかった理由としては、2枚のMTCBを横に並べた場合と比較して
変更目的である小型化の面で差が無かったためだと考えられる。
支柱
MIRSMG3D 支柱製造仕様書
- MIRSMG3D標準の支柱である。
- 長さの余ったケーブルが巻きつけられていた。
タッチセンサー
MIRSMG3D 部品表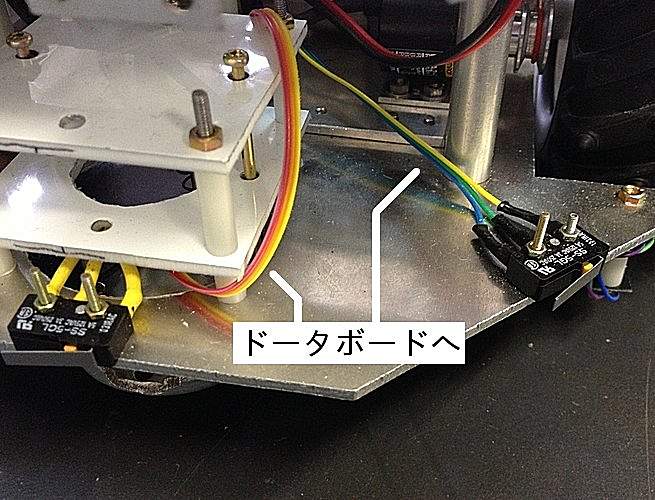
- MIRSMG3D標準のセンサーである。
- 正面に1つ、左右に2つの合計3つが下段シャーシに取り付けられていた。
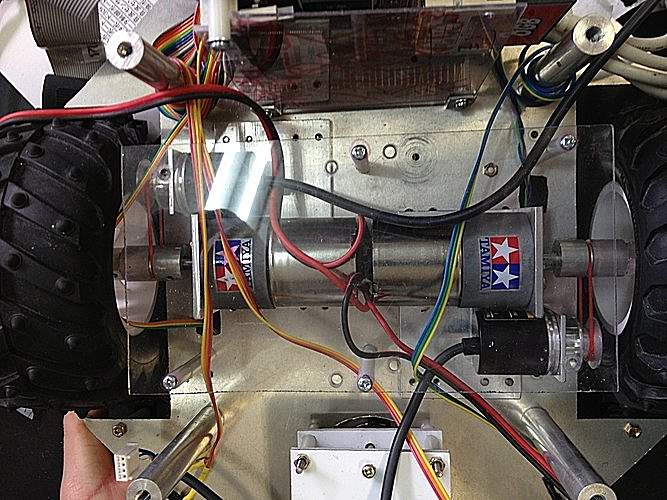
モーターとロータリーエンコーダ
MIRSMG3D モーター取り付け金具製造仕様書
MIRSMG3D ロータリーエンコーダ取り付け金具製造仕様書
- MIRSMG3D標準の設計である。
- MTCBの真下に取り付けられていた。
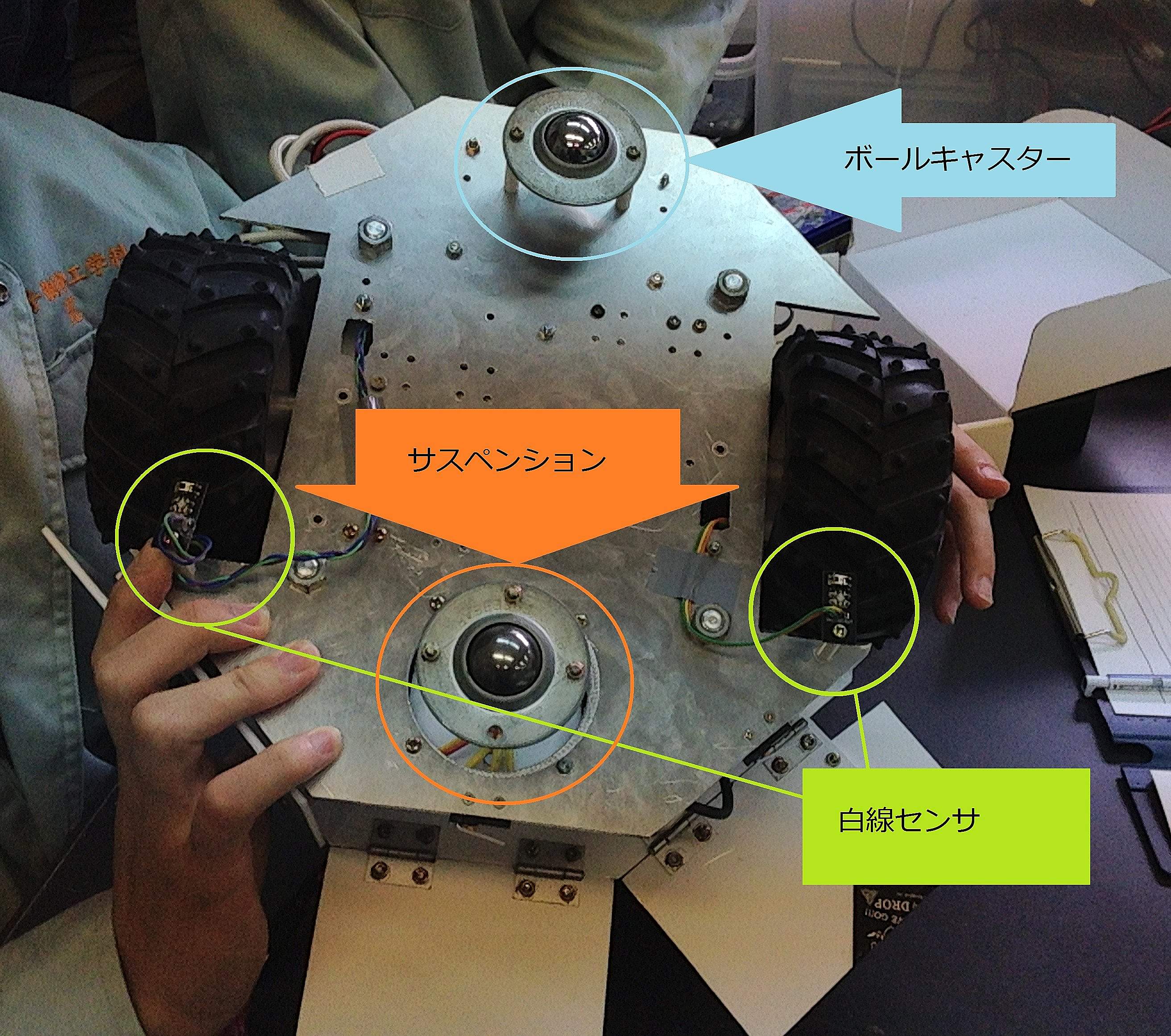
サスペンションとボールキャスター
MIRS1201 システム提案書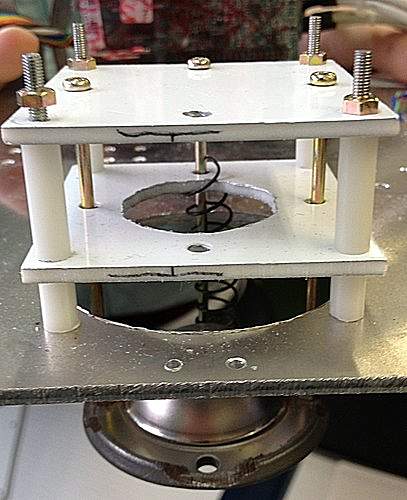
MIRS1201 サスペンション詳細設計書
- 機体前方のボールキャスターにはサスペンション機構が付加されていた。
後方のボールキャスターはMIRSMG3D標準のものである。 - キャスターと下段シャーシの間にバネを挟むだけの簡単な構造で、直線的な動作をする。
- 変更理由はシーソー、段差攻略時の衝撃吸収である。
- 機体前方のボールキャスターにはサスペンション機構が付加されていた。
白線センサー
MIRSMG3D 部品表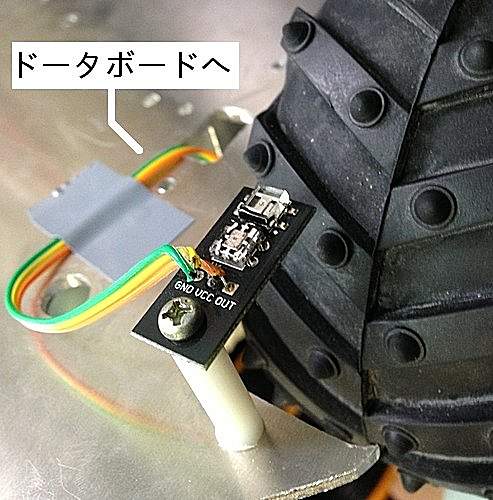
- MIRSMG3D標準のセンサーである。
- 下段シャーシ裏、左右のタイヤのすぐ近くに1つずつ取り付けられていた。
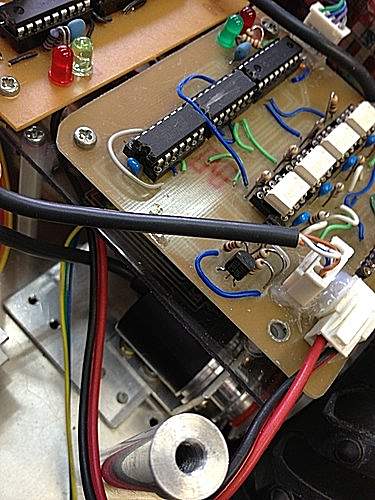
CPUボード・FPGAボード・ドータボード
MIRS1201 ELEC詳細設計書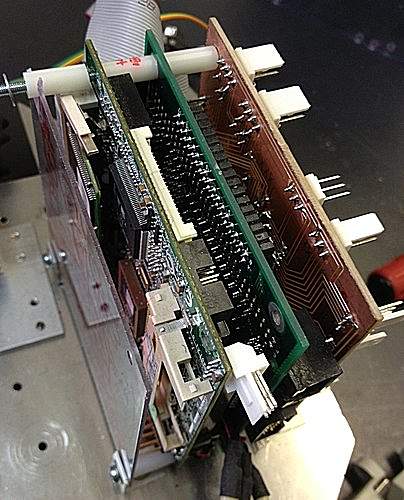
MIRS1201 システム提案書
MIRS1201 システム基本設計書
MIRS1103 ドータボード
MIRS1104 解体報告書
MIRSMG3D ドータボード製造仕様書
- CPUボード、FPGAボードはMIRSMG3D標準のものである。
- ドータボードは機能が1枚にまとめられており、新規に設計されたものである。
MIRS1103,4,5が設計した回路をもとに設計されているため、使用されていない6ピンのコネクタが存在している。
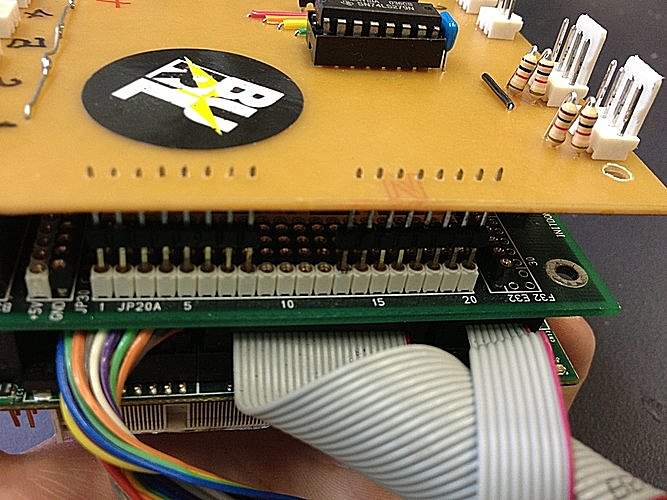
もともとはMIRS1104が搭載していた方位センサー用のコネクタである。 - ドータボードから16本のピンが直接伸びているため、8ピンケーブルを使わずにFPGAボードに接続可能になっている。
システム提案書とシステム基本設計書の内容から、接触不良改善と省スペース化が目的と分かる。 - 3枚のボードが直接接続された状態で、L字金具によって垂直に並べられていた。
こちらもシステム基本設計書から省スペース化が目的と分かる。 - CPUボードとFPGAボードを接続するためのピンは、無理に差し込まれたためか歪んでいて抜きにくかった。
下段シャーシ
MIRS1201 シャーシ詳細設計書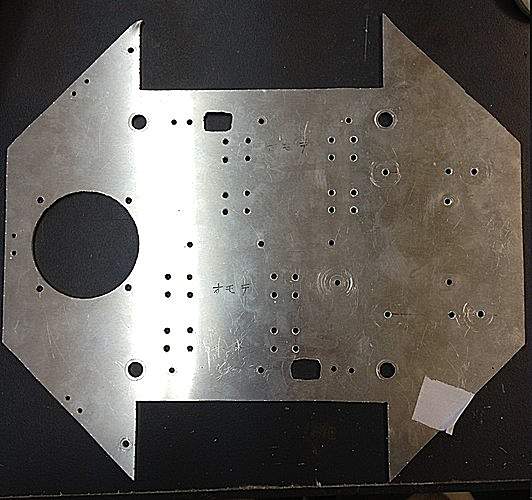
MIRS1201 システム提案書
MIRSMG3D 下段シャーシ製造仕様書
- MIRS1201が新規に設計したシャーシである。
- 上段シャーシ同様、小型化がなされている。
システム提案書から、壁への接触を避けることが目的と分かる。 - 上段シャーシがアルミ複合板製に変更されたのに対しこちらはアルミ合金製のままである。
システム提案書を読むと、上段シャーシに比べて強度が必要な部品であることと重心を低く保つことが理由と分かる。
全部品
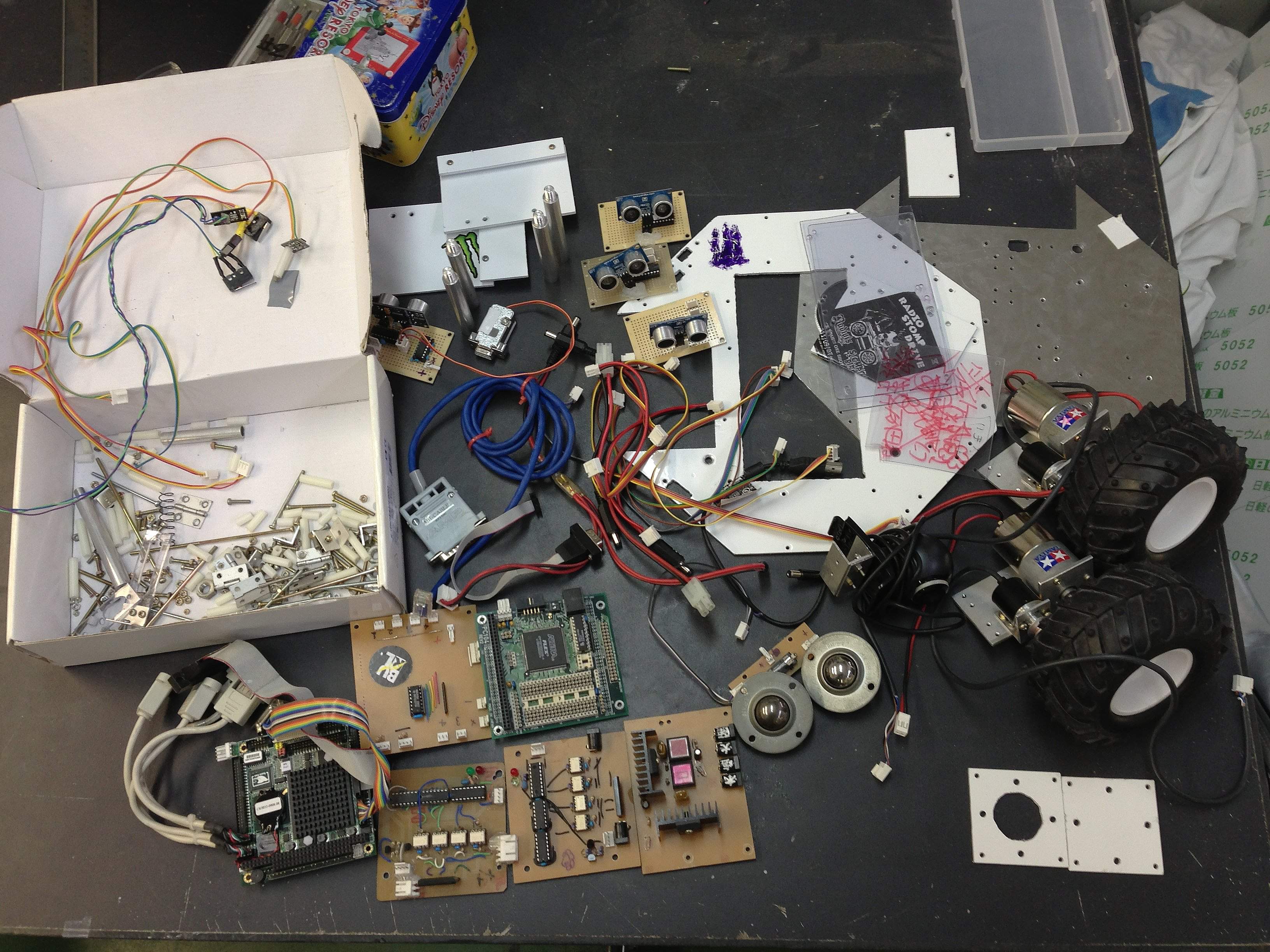
|
総括
MIRS1201が標準機から改良した箇所をまとめた表を以下に示す。
| 改良箇所 | 詳細 | 目的 |
|---|---|---|
| 超音波センサー | パララックス社超音波距離センサーモジュールを使用 | 近距離まで測定することを可能にし、 取り付け位置に関する制限を解消 |
| 超音波センサー | 左側に2機搭載 | 小部屋攻略時に左の壁沿いに進むため、 冗長性を高めて測定精度向上 |
| 電源ボード,MTCB | コネクタをDCジャックに変更 | 接触不良や断線の防止 |
| 電源ボード | コネクタに文字を書く | 接続先を間違えることの防止 |
| USBコネクタ,VGAコネクタ | 上段シャーシに直接取り付けた | コネクタ周辺の構造の簡略化による整備性向上 |
| 上下段シャーシ,バンパー | 小型化 | 軽量化 壁への接触頻度を下げる |
| 上段シャーシ | 素材をアルミ合金からアルミ複合板に変更 | 軽量化 |
| 上段シャーシ | 中央に窓を作成 | MTCB周辺の整備性向上 |
| ボールキャスター | サスペンション機構を搭載 | シーソー、段差攻略時の衝撃吸収 |
| CPUボード,FPGAボード,ドータボード | シャーシに対し垂直に設置 | 省スペース化 |
| ドータボード | FPGAボードとの接続用に16本のピンを直接取り付けた | 接触不良防止と省スペース化 |
所感
MIRS1301の解体を行うにあたっては、できるだけ多くの写真を撮ることを心がけたました。 過去の解体報告書の総括・所感に、「写真が不足した」という文章がいくつか見られたからです。 解体途中では理解しきれない箇所も多かったのですが、 「分からない箇所はあとで写真を見て考えればいい」という方針のもと作業を進めました。 そのためMIRS1301の解体作業自体は比較的短時間で終了しました。 100枚を超える写真と過去のドキュメントとを良く見比べて解体報告書を書くことができたので、 この方針は間違っていなかったと感じています。 今回の解体報告書を書くことでMIRSMG3D標準機への理解が深まりました。 標準機のシステムの概要は事前の説明で聞いていたはずでしたが、 実のところ解体報告書を書き始めた時点でもほとんど理解できていませんでした。 ドータボードに関する文章を考える際などは、 MIRS1205による解体報告書が非常に参考になったので感謝しています。 |