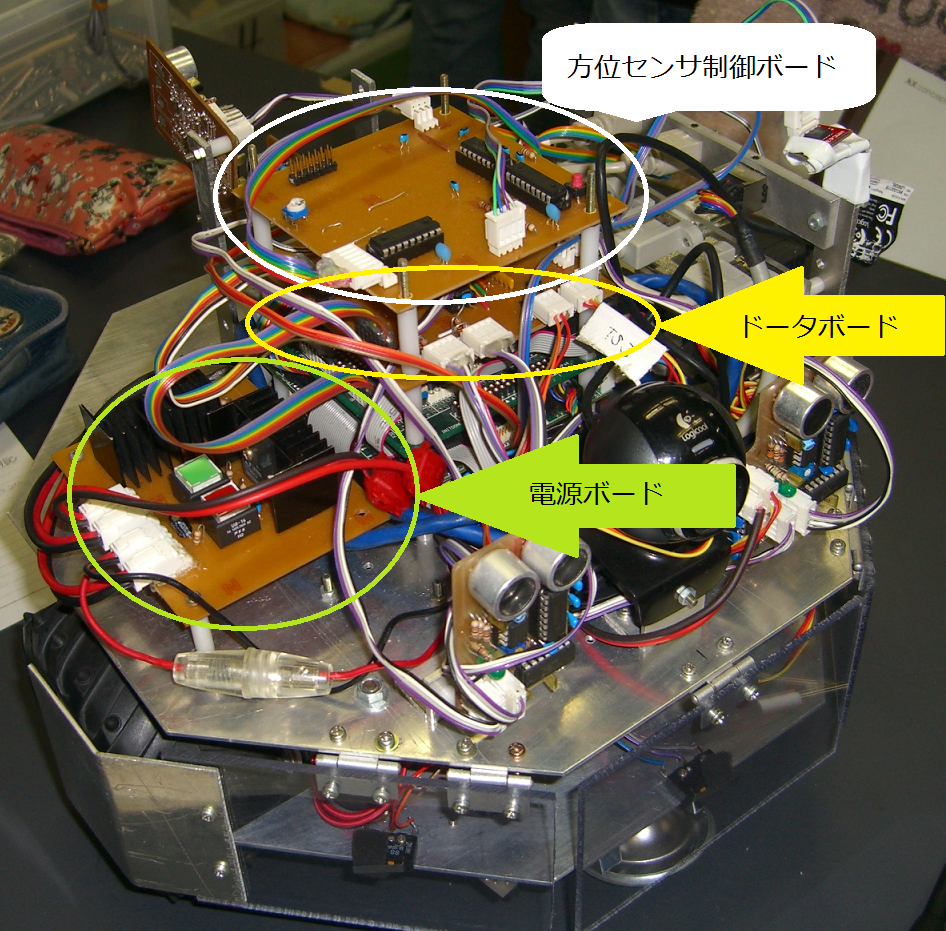
写真1 全体図
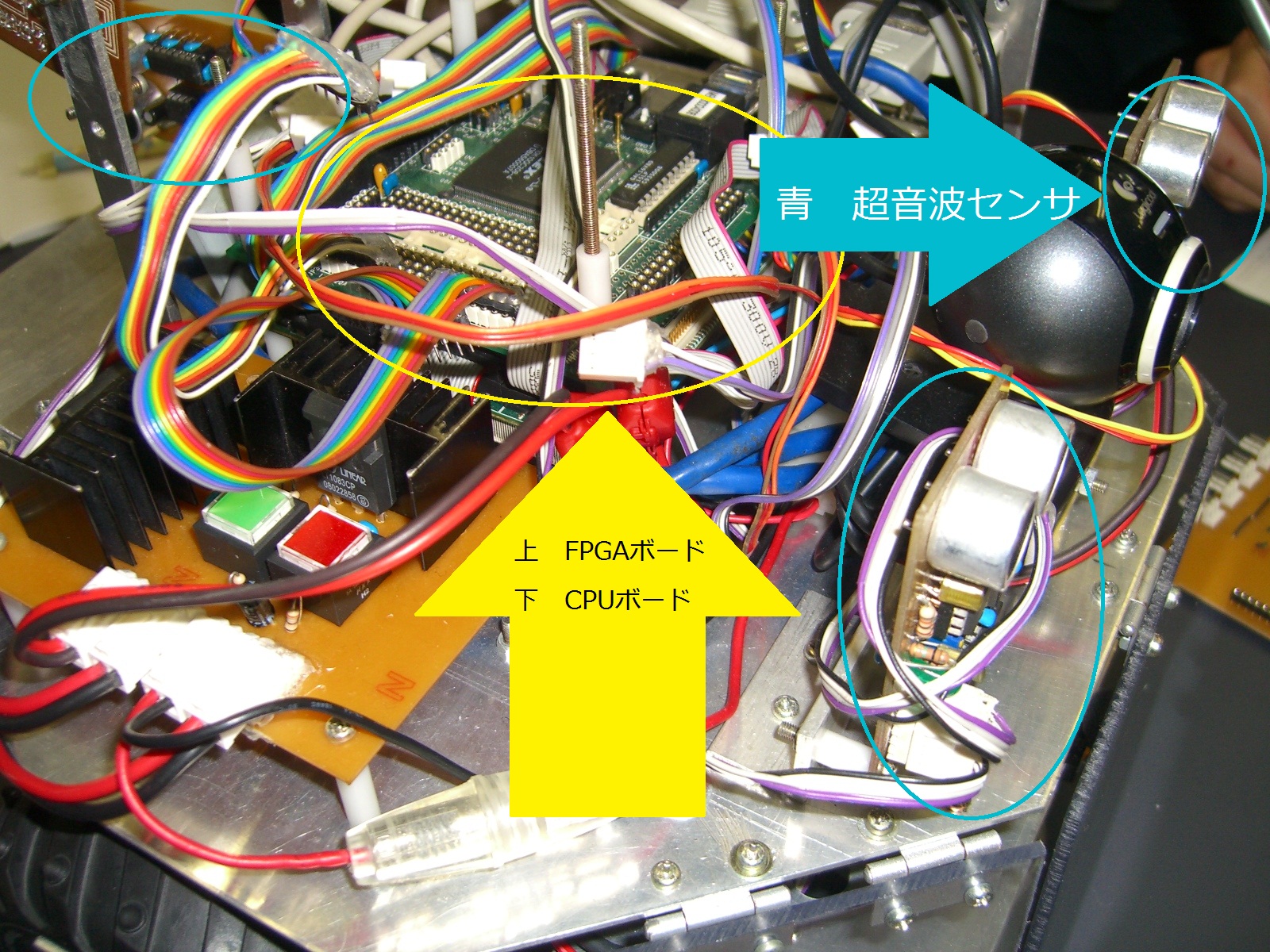
写真2 全体図
・FPGAに取り付けられていたFPGAダウンロードケーブル、超音波センサボードと接続されていた4ピンケーブル、CPUボードに接続されている電源ケーブルを取り外し、FPGA・CPUを支柱から取り外した。
・ここでは、機体の小型化が図られたこともあり基板が非常にコンパクトに積み上げられていた。また、配線の取り回しを少しでも楽にするため、ドータボードを1つにまとめたのだと考えられる。
- 上段シャーシ解体手順
- 装着されていた順番は上から 方位センサボード→ドータボード→FPGA→CPUとなっていた。ボードとボードの間はスペーサーが使用されており(FPGA、CPU間はスペーサー無し)、ボード自体を固定するのにはボルトにナットを2つずつ使用することによって固定されていた。
- 一番上の方位センサとドータボードに接続されている6ピンコネクタを外し、ボードを取り外した。
- 2段目のドータボード(これは、標準機の2枚分が1枚にまとめられていた)から、FPGAに接続されている8ピンコネクタ×2、タッチセンサに接続されている3ピンコネクタ×4、モーターボードに接続されている4ピンコネクタ×2、電源に接続されている2ピンコネクタ、白線センサと接続されている3ピンコネクタ×2を取り外し、ドータボードを支柱から取り外した。
- 上段シャーシの端まわりからナット、ねじを外し蝶番を機体から取り外す。
- ナット、ねじを外し蝶番からバンパーを取り外す。
- 標準機との変更点は標準機のバンパーの横にアルミの板を追加して、標準機では反応しにくい壁の当たり方に対応できるように変更されていた。
- カメラの下部についているねじを外し、分解した。標準機カメラ取り付け金具製造仕様書との違いはなかった。
- 標準機では2つのねじを使ってカメラを取り付けていたが、この機体では1か所で固定されていた。小型化によりスペースが減ったためだと考えられる。
- 上段シャーシの前方と後方の2ヶ所に4つの超音波センサが取り付けられていた。
- 後方の超音波センサは上段シャーシの取り付けられていた、L字の金属パーツに 2つのねじを使用して取り付けられていた
- 超音波センサを外すため、ねじ2本とナット2個を外し、スペーサーも取り外した。
- 超音波センサをシャーシに固定していたL字の金属パーツを取り外すため、 ねじ2本、ナット2個を取り外した。
- 超音波センサは、標準の2つから4に拡張されていた。2つは前方に向けられており、画像処理をするとき、機体がしっかり前を向くために使ったと考えられる。もう2つは左右の距離を計測するために取り付けられていた。左右の距離を計測する2つの超音波センサは、互いに段違いに配置されていた。これは超音波センサは、距離が近すぎると計測できず、精度も悪いという特徴がある。そのため、壁と超音波センサとの距離を少しでも稼ぐため、このように配置したのだと考えられる。なお、この2つの超音波センサを使うことによって、直進の安定化を図っていたと考えられる。
- MIRS1104 通路走行プログラム仕様書より、後方に左右の壁を検知するための2つの超音波センサは、ロータリーや小部屋の攻略で仕掛けに入ったかどうかを検知したり、出口を検知するためにも活用されていることが分かった。
- L字のアングルを2つ使ってUSB取り付けパネル、PS/2LAN取り付けパネル、VGA取り付けパネルを固定してあった。 M3なべ小ねじ、M3ナット6mm-10mmを左右2本ずつ、使用し上段シャーシと固定してあった。
- 標準機各種ポート取付板製造仕様書と比べて違いはなかった。
- 上段シャーシの下から上に向かって、130mmのねじを通してあり、基板を固定していた。上段シャーシと下段シャーシを分離させた後、レンチで外した。標準部品であるラックから変更されていた。
- 機体を小型化してあったため、標準の支柱では、多くのスペースをとってしまう。そのためスペースの節約のため支柱を使用せずねじによって対応したのだと考えられる
- 下段シャーシと上段シャーシの分解
- 上段シャーシのコードを通す穴が標準機では4つだったものが2つに変更されていた。この変更は、小型化を目指して穴を減らしたのだと推測できる。
- 下段シャーシの支柱取り付け穴から、M8のボルトが通してあり上段のシャーシと固定してあった。レンチを用いて取り外した。なおこの部品は、標準部品であるアルミの支柱(丸)からボルトに変更されていた。
- 標準では支柱の長さは95mmであった。しかし、それでは、機体の高さが高くなってしまうという問題があったため、M8のボルトとナットを採用することにより、機体の高さを低くしたのだと考えられる。
- 下段シャーシ解体手順
- 25mmスペーサー・M3なべ子ねじ・M3ナットによって2ヶ所から上部シャーシに固定されていた。
- (1)のケーブルは2つに分岐した後左右のモータボードへつながれていた。
- (2)(3)のケーブルはそれぞれ別のバッテリーへつながれていた。
- (4)のケーブルはヒューズを通った後コネクタにつながり、その後CPUボード・超音波ボード(親機)につながれていた。
- 標準機デュアルレギュレータ電源ボード製造仕様書と比べて違いはなかった。
- 下段シャーシの中心部前後の部分に、取り付けられているMTCBを取り外す。
- 10mmのスペーサーを下段シャーシとの間に挟み、16mmのM3なべ小ねじを4本使い左右どちらも取り付けられていた。
- 標準機MTCB製造仕様書の実装図により、標準部品からの変更はないことが確認された。
- ねじを用いて下段シャーシに取り付けてあったので、ドライバーを用いて外した。
- 六角ボックスレンチを用いてモータからタイヤを外した。
- 円柱ハブシャフトとプーリー取り付け部に繋いでいた輪ゴムを外した。
- ドライバーを用いて、ロータリーエンコーダ取付用金具に取り付けられていたロータリーエンコーダを取り外した。
- 標準機との違いは見られなかった。
- 下段シャーシの白線センサ取り付け穴の白線センサを取り外す。
- 使用されていた8mmのM3なべ小ねじを取り外した。白線センサと下段シャーシの間には、スペーサーやワッシャーがはさまれていた。
- 標準機との違いは見られなかった。
- ボールキャスターと機体を繋いでいたサスペンションアームとパーツを機体から、ねじを外すことで取り外す。
- ダンパをサスペンションアームから外した。
- サスペンションアームとボールキャスター本体をねじを外して取り外した。
- サスペンションは、標準機にはついておらず、新たに追加された部品であった。このサスペンションは、前後のばねの強さを変えてあり常に水平になるようにしてあった。これは、カメラで画像を取り込むときに、機体が傾いたりして、画像認識の精度が下がるのを防ぐ目的があったと考えられる。
- コードが断線していた。(一か所)
- 下段シャーシのタッチセンサ取り付け穴に、タッチセンサが取り付けられていた。
- M2小ねじ10mmが2本使用され、下段シャーシの上から取り外した。
- タッチセンサは写真17のように、スポンジをかませて復元力を強くしていた。
- 標準機バンパー製造仕様書と比べて違いは見られなかった。
- 全部品
- 分解したMIRSは、小型化が図られており、ドータボードやシャーシが小型化されていた。
-
1.1.主要ボードの取り外し
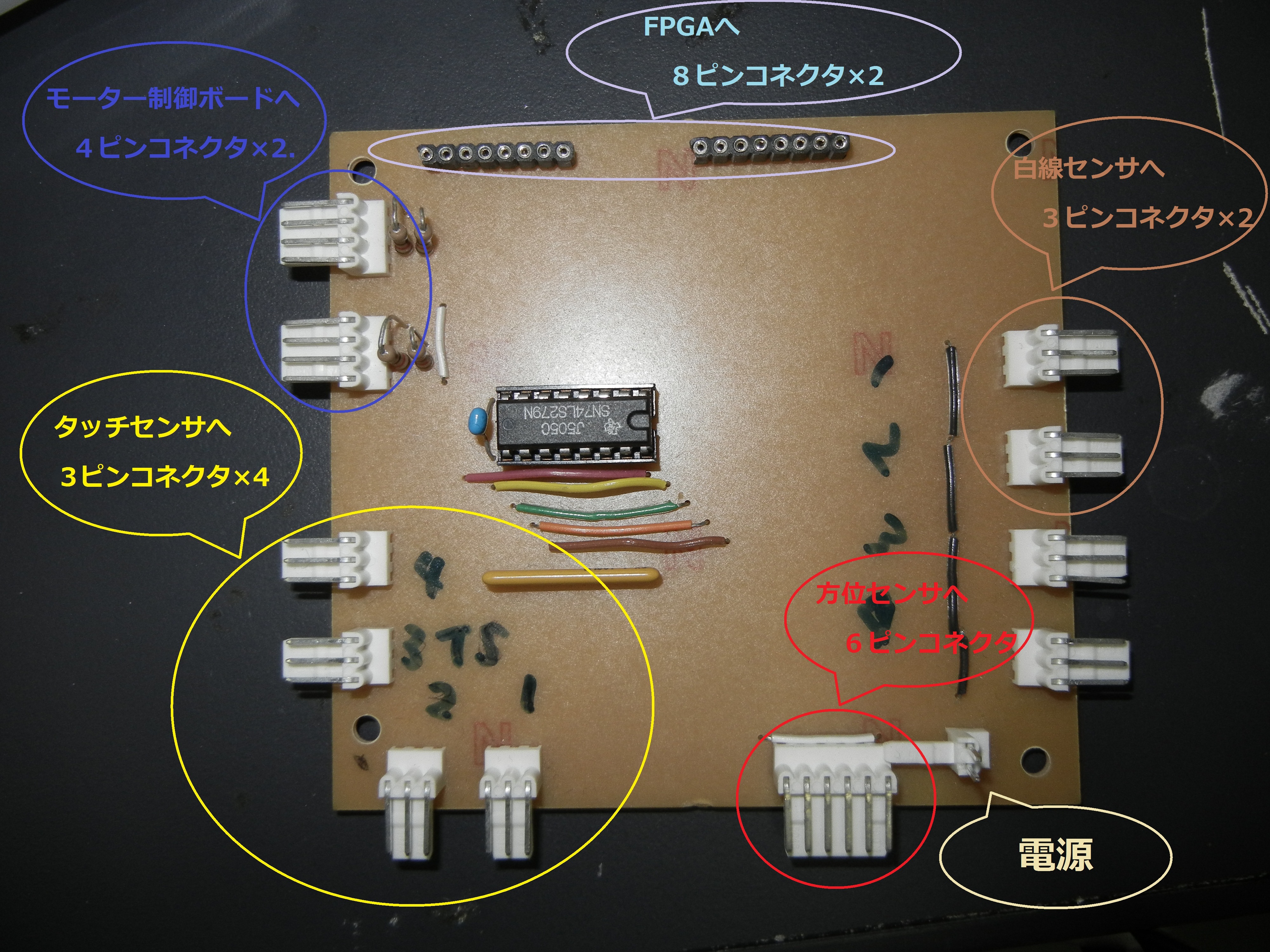
写真3 ドータボード
1.2.バンパーの取り外し
写真4 バンパー
標準機バンパー製造仕様書
1.3.カメラの取り外し
1.4.超音波センサの取り外し
.jpg)
写真5 超音波センサ 前
.jpg)
写真6 超音波センサ 後ろ
標準機超音波センサボード製造仕様書
1.5.接続端子類の取り外し
1.6.基板の支柱の取り外し
標準機ラック製造仕様書
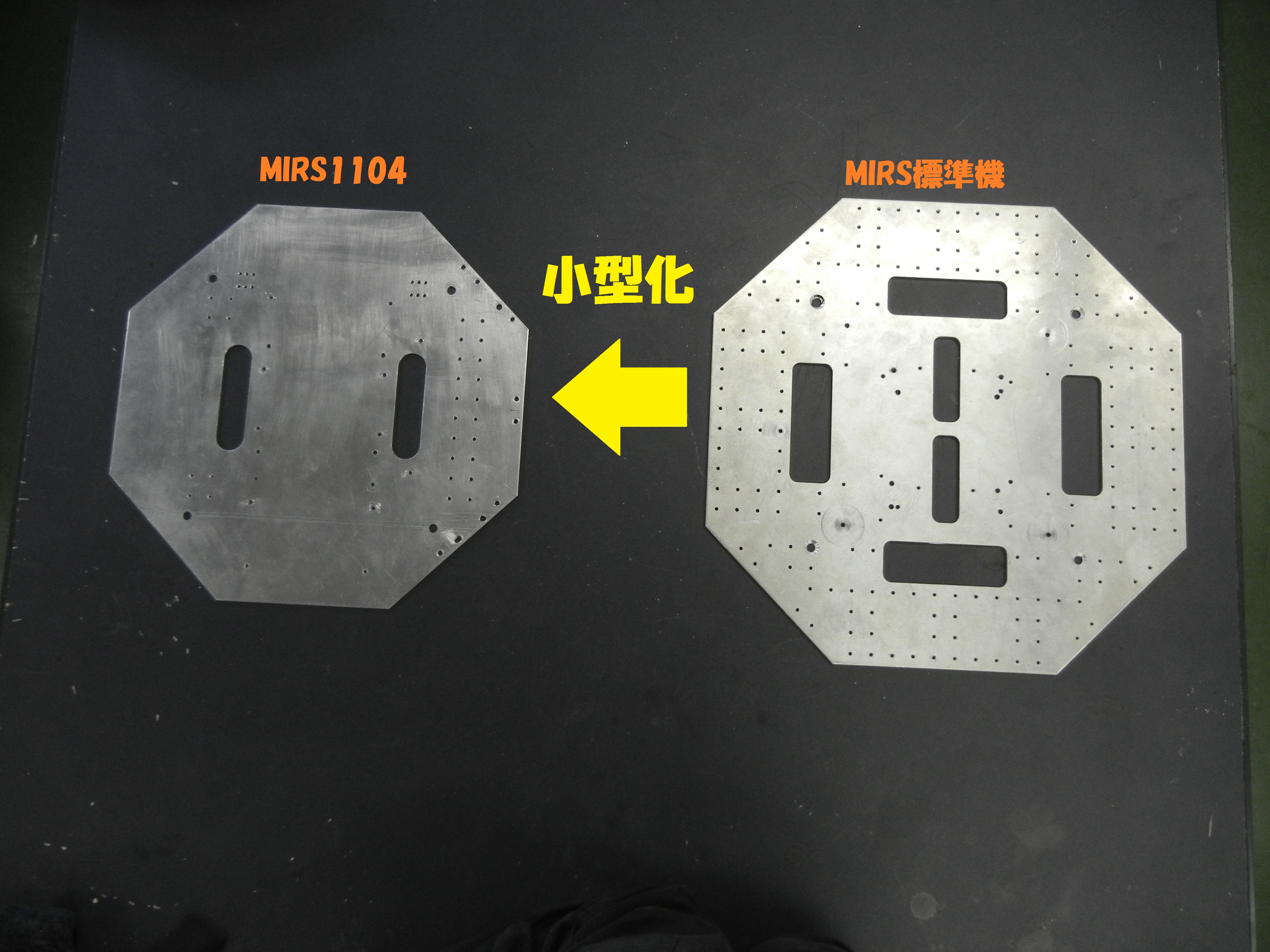
写真7 上段シャーシ
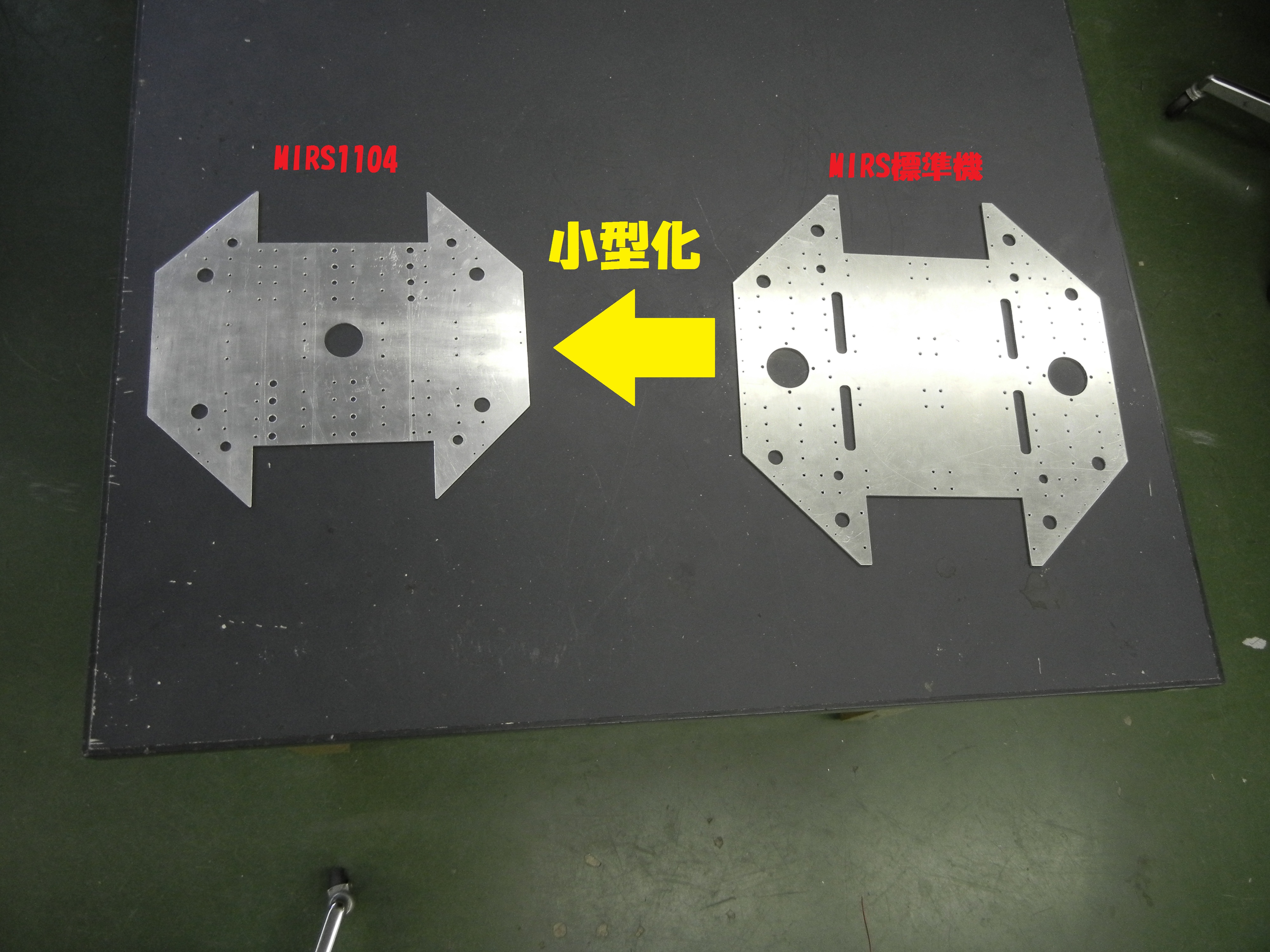
写真8 下段シャーシ
標準機支柱製造仕様書
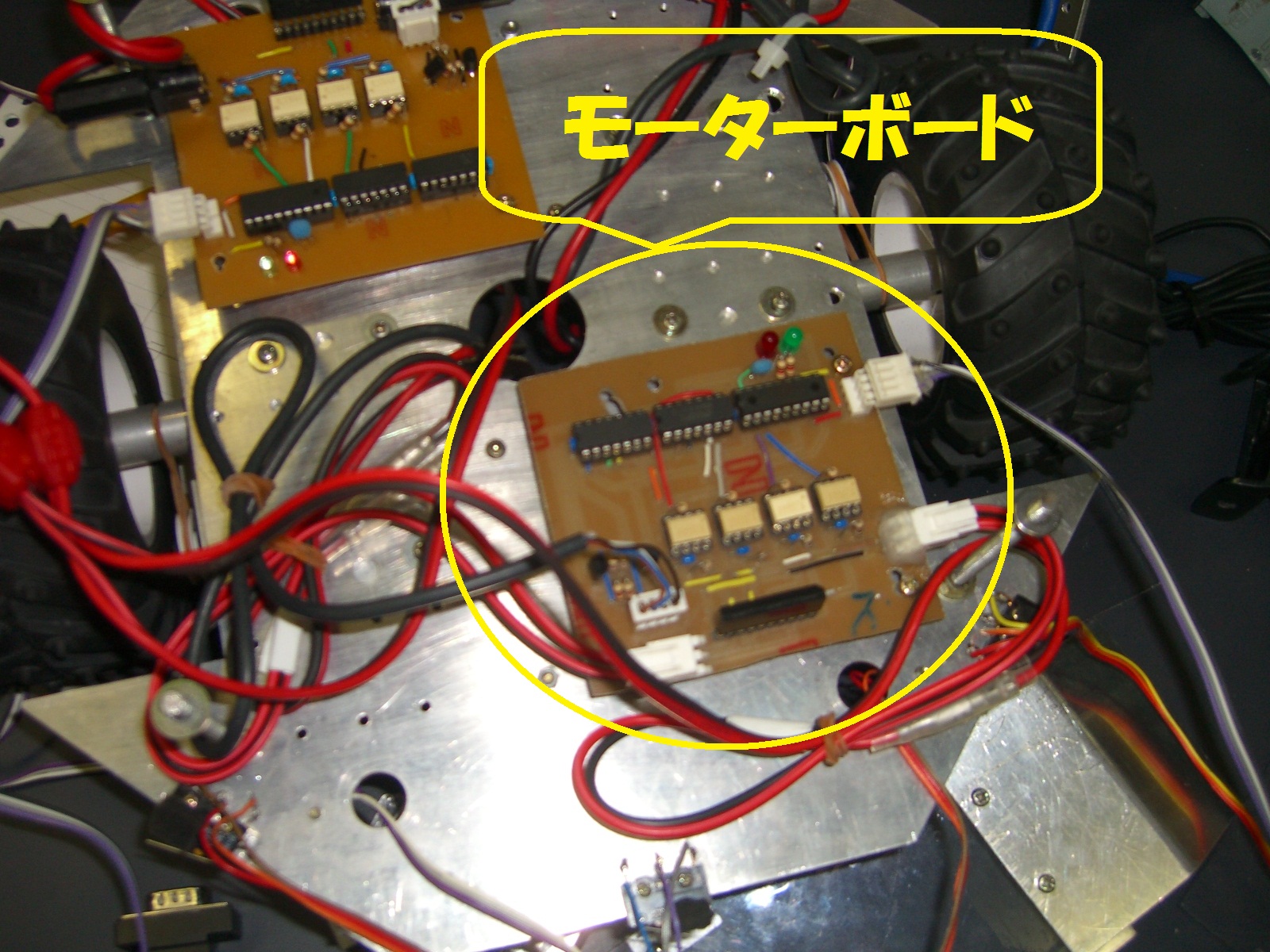
写真9 全体図
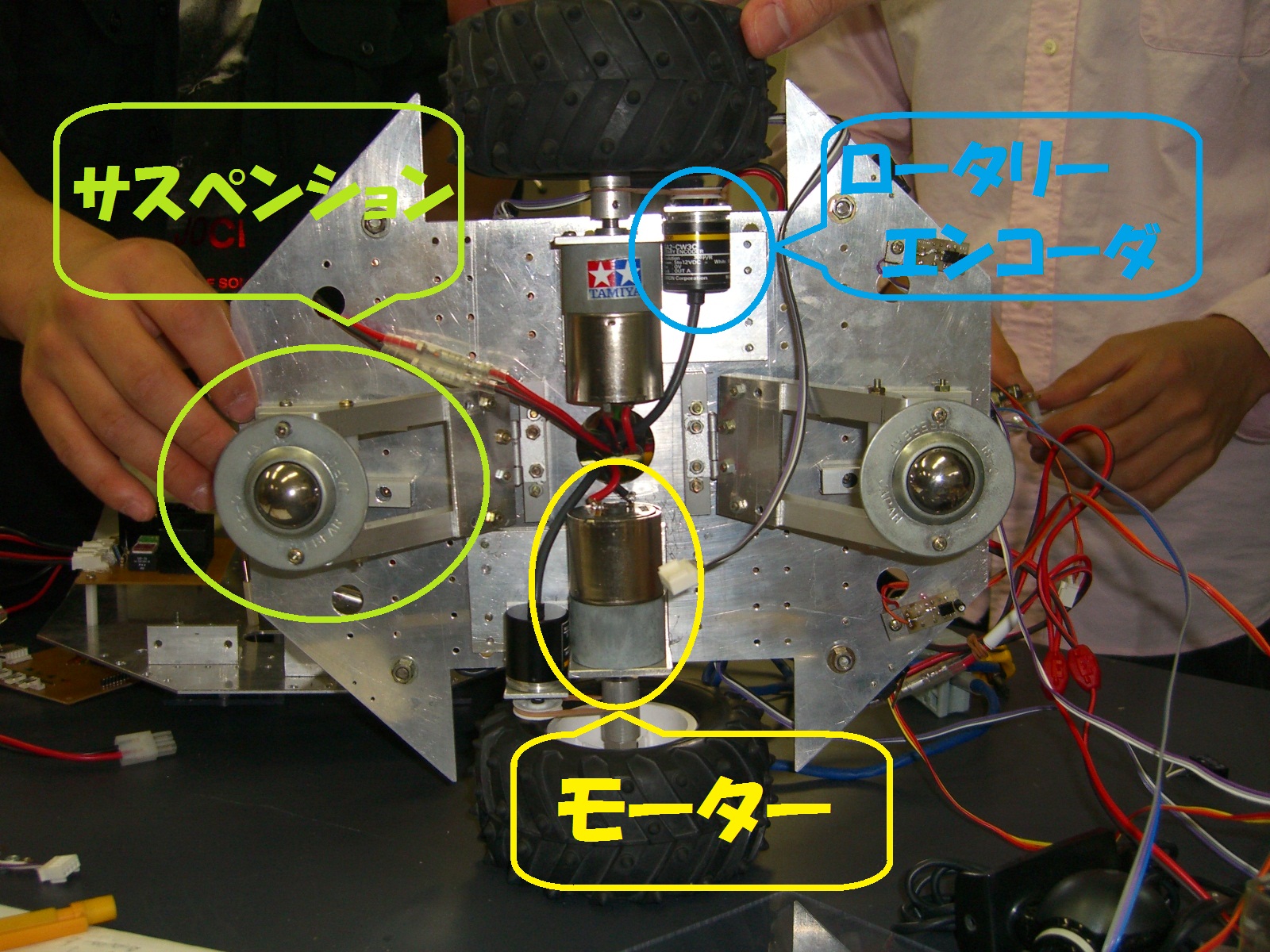
写真10 全体図2
3.1.電源ボードの取り外し
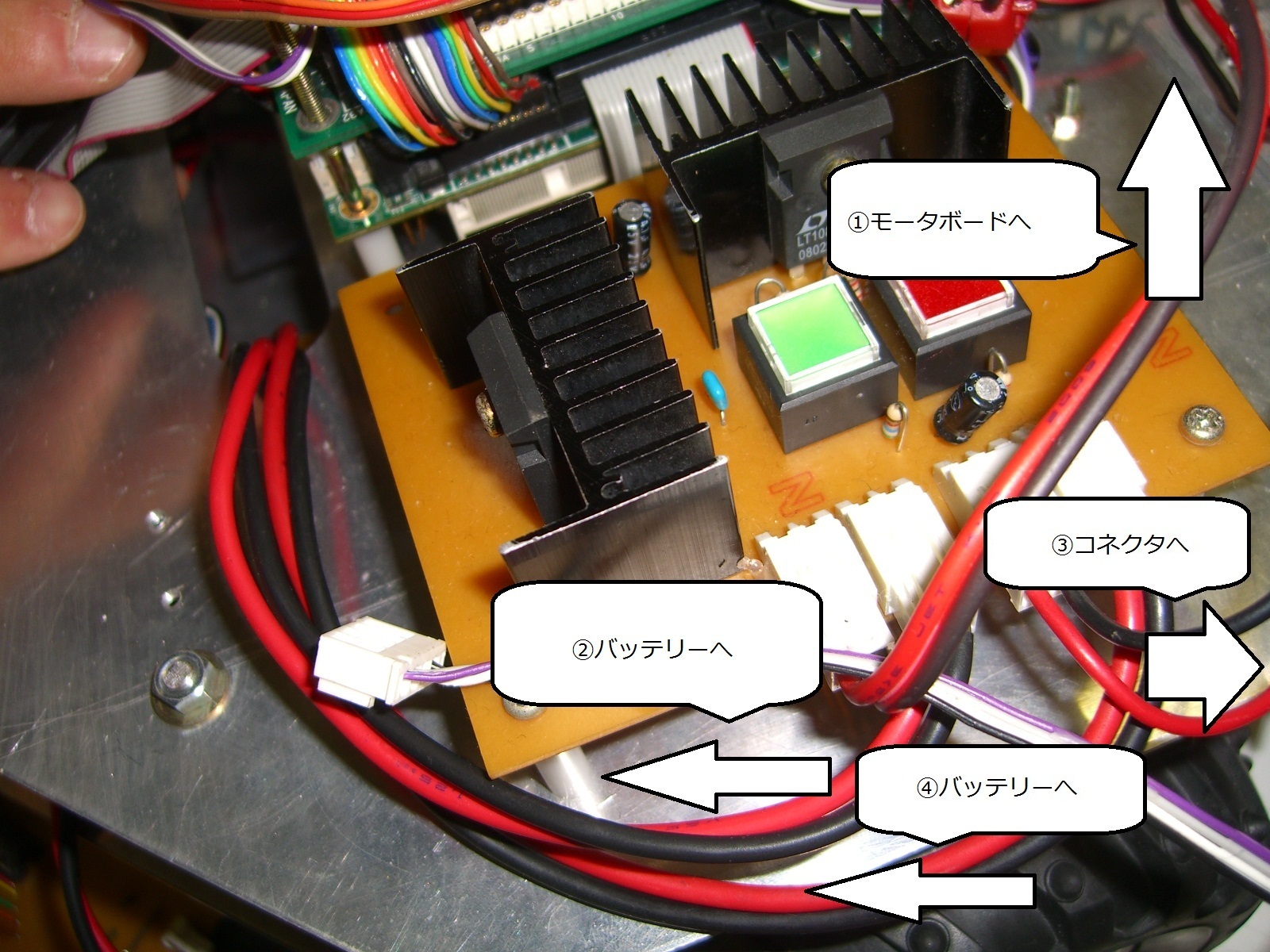
写真11 電源ボード
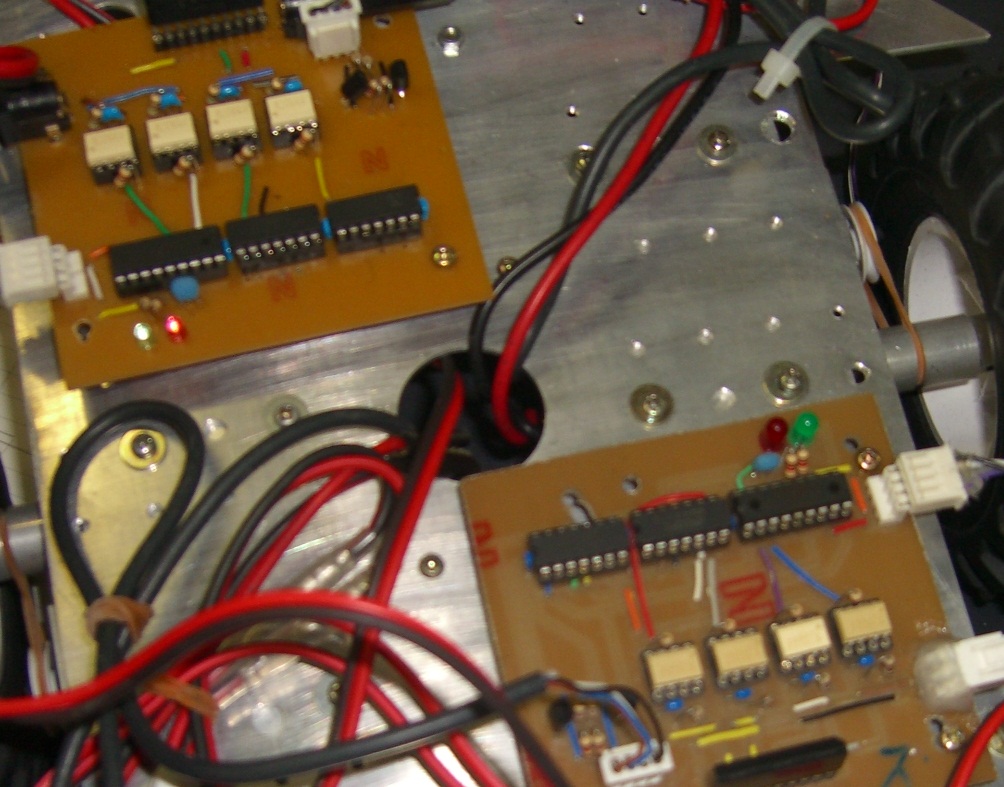
写真12 MCボード
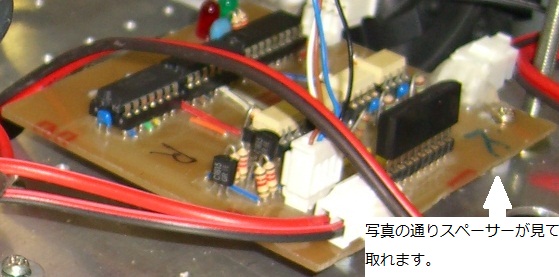
写真13 MCボード 固定方法
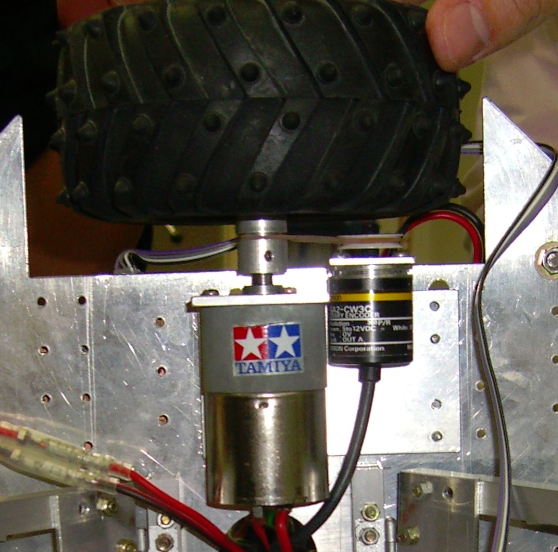
写真14 モータ&ロータリーエンコーダ
標準機モータ取付金具製造仕様書
標準機ロータリエンコーダ取付金具製造仕様書
3.4.白線センサの取り外し
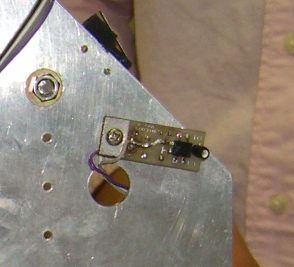
写真15 白線センサ
3.5.サスペンション&ボールキャスターの取り外し
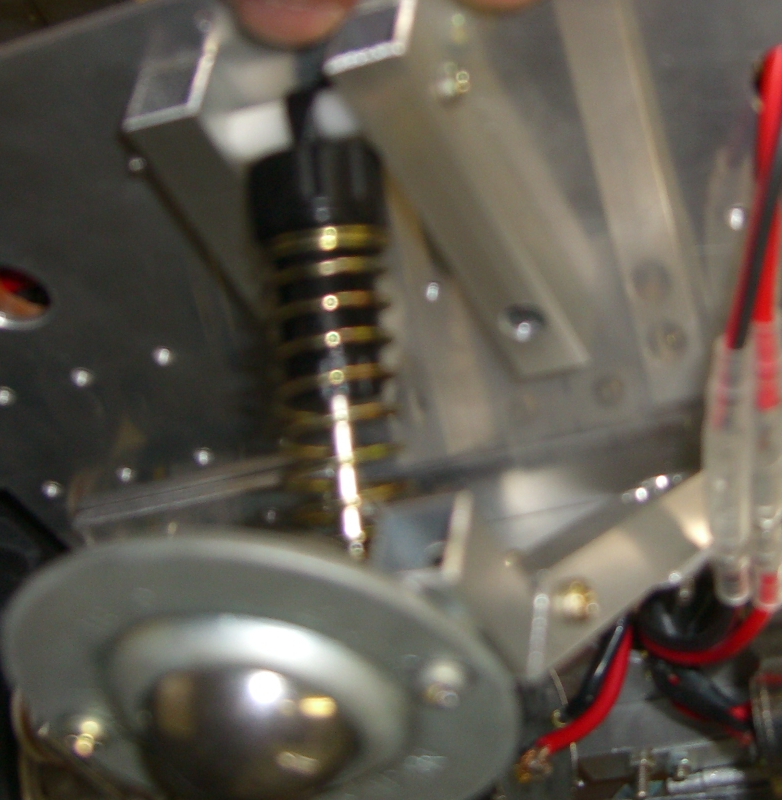
写真16 サスペンション&ボールキャスター
MIRS1104メカ詳細設計書
3.6.タッチセンサの取り外し
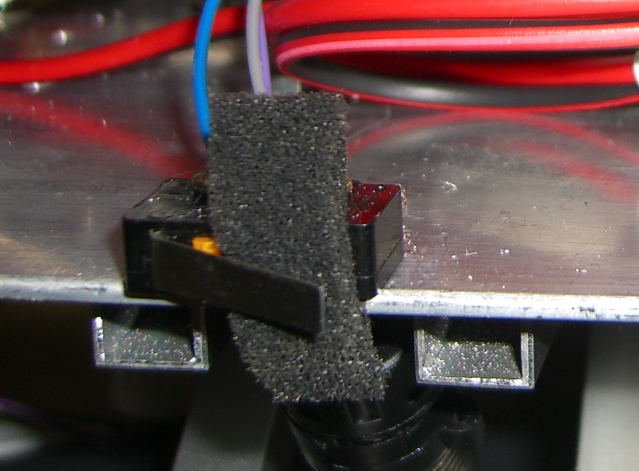
写真17 タッチセンサ
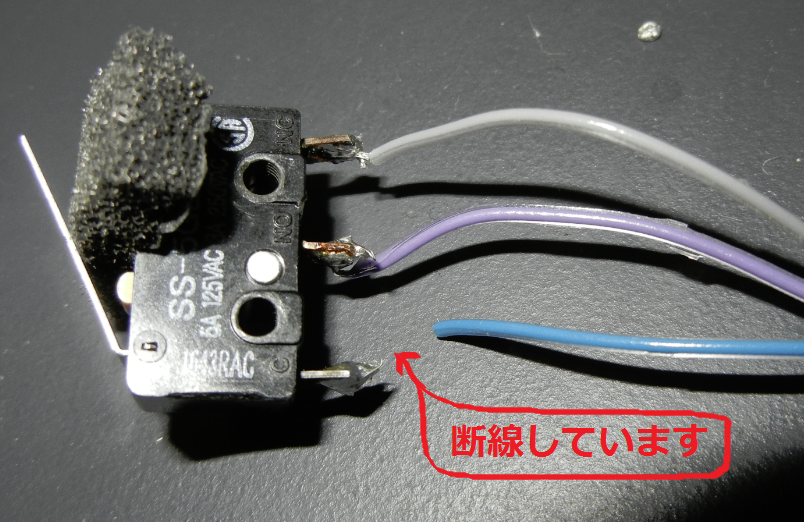
写真18 タッチセンサ 断線
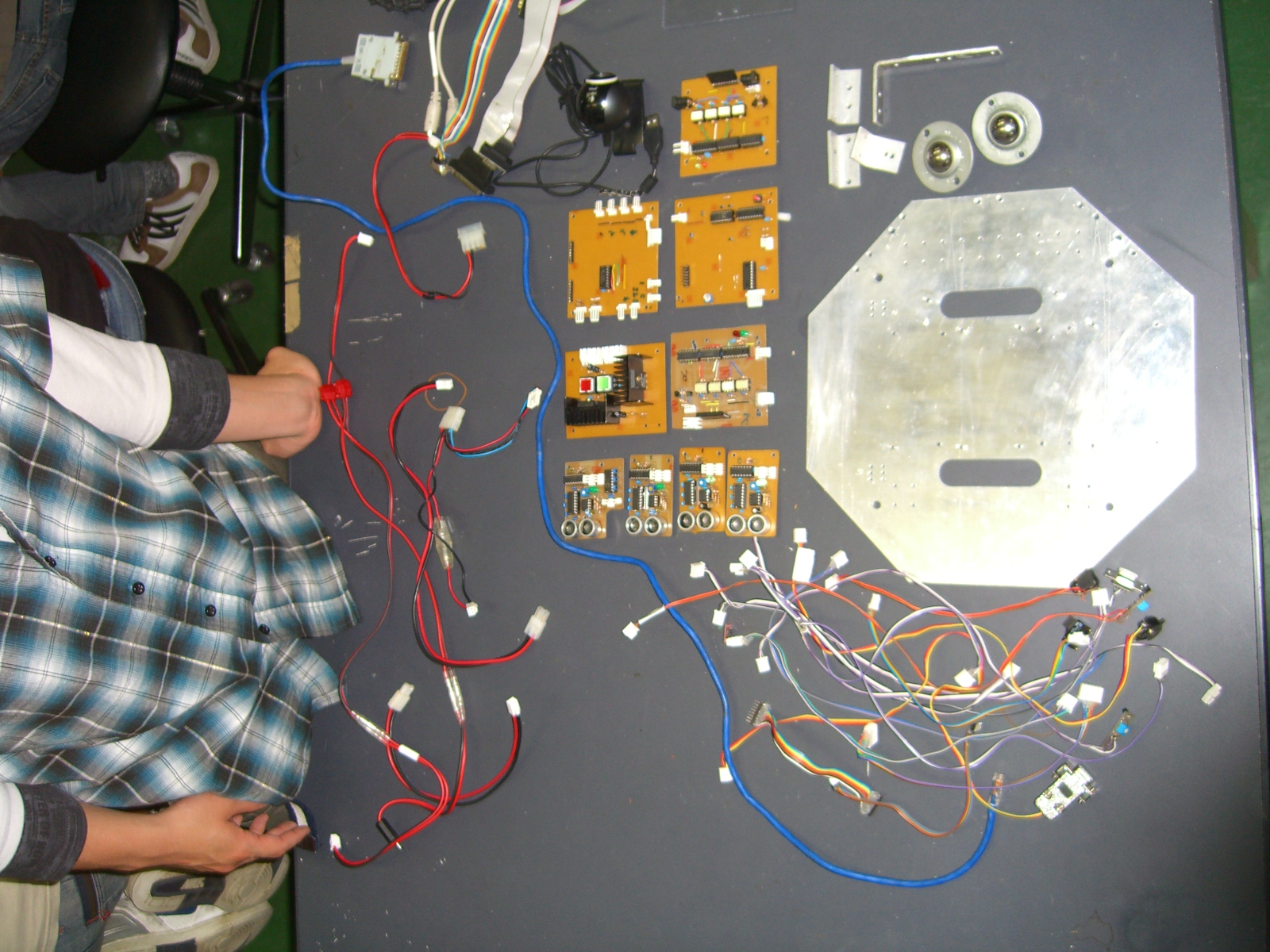
写真19 全体 写真1
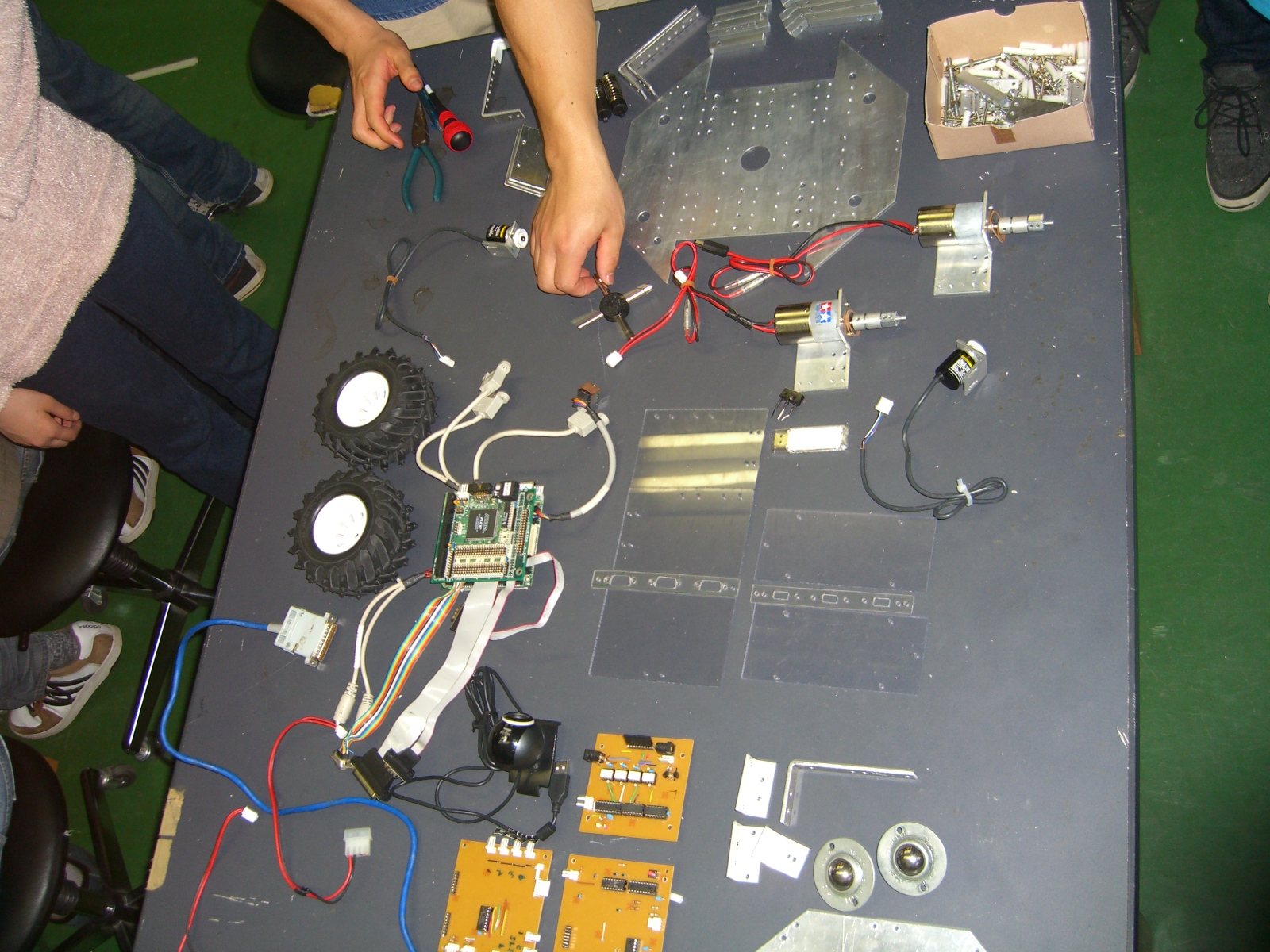
写真20 全体 写真2
| 改良場所 | MIRS1104の詳細 | 目的 |
|---|---|---|
| バンパー | バンパーの部分が大型化されていた。 | 壁に当たった時、確実にタッチセンサが反応するようにするため。 |
| カメラの取り付け | 標準機では2つのねじを使ってカメラを取り付けていたが、この機体では1か所で固定されていた。 | 小型化によりスペースが減ったためだと考えられる。 |
| 超音波センサ | 標準の2つから4つに拡張されていた。
2つは前方に向けられていた。 左右の距離を計測する2つの超音波センサは、互いに段違いに配置されていた。 |
直進安定性の向上
画像認識時の補正 ロータリー、小部屋の攻略。 |
| 基板の支柱 | L字アングルからM3のねじに変更 | 小型化を実現するため |
| シャーシの支柱 | 標準機のアルミ製からM8のねじに変更 | 上段シャーシと下段シャーシの間隔を狭めるため |
| サスペンション&ボールキャスター | シーソーをクリアするため標準機から追加した。 | シーソーをクリアするため
画像認識の安定性の向上 |
MIRS1203ドキュメント管理台帳