| 名称 |
MIRS1201 システム提案書 |
| 番号 |
MIRS1201-DSGN-0001 |
最終更新・2011.10.19
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2012.10.19 |
齋藤 亮 |
齋藤 亮 |
初版 |
目次
1.はじめに
-
本ドキュメントは、MIRS1201のシステムを提案するドキュメントである。
2.システム概略
-
我々MIRS1201班は、ハードウェアに関してはできる限りシンプルな設計を行うことをコンセプトに、小型化、軽量化を図る。一方で、ソフトウェアに関しては、より確実なプログラムの設計を行うことをコンセプトに、確実に障害物をクリアするようなプログラム設計をする。
少し具体的な提案を次に示す。
- 2.1 メカトロニクス
- ・軽量化
軽量化する理由は、重さによるモーターの初動の不確実さをなくすためと、モーターへの負荷を減らし、少しでも速度アップを図るためである。
軽量化案としては、二つあり、一つ目は、上下段シャーシの素材の変更、標準機のシャーシは、アルミ(厚み3mm)なので、重いものとなっている。これは、強度が必要ならそのままでもよい。しかし、MIRSは壊れない程度の強度があればよいので、もっと軽い素材にすればよい。候補としてあげる素材は、塩化ビニル板、アクリル板などがある。アルミの比重は2.4で、塩ビの比重は1.4、アクリルの比重は1.2なので、シャーシ材質の変更だけでも40%近くの軽量化ができる。二つ目は、シャーシの小型化による軽量化がある。必要なものが乗り、正常に動作できる最低限の大きさを残し、そのサイズで作ることにより、ある程度の軽量化が見込める。
- ・小型化
先に述べた軽量化の理由の一つとして挙げられる。また、小型化することにより、通路走行や、ロータリー走行、曲がるなどの時に壁や角に引っかかるなどのタイムロスを無くすことができる。
- ・低重心化
軽量化、小型化を行うにあたって、機体の不安定化が予想できる。酷ければ、シーソーなどの障害で、横転なんてことも考えられるため、低重心化を図る。案としては、多くの基盤を下段シャーシに置く、下段シャーシの素材を変えないなどが挙げられます。
- ・サスペンション
シーソーや段差などで、機体が浮いてしまいタイヤが空回りしてしまうことを避けるためや、機体への衝撃の緩和をするために導入する。(下のシステム外観図では、まだ導入されていない。)
- 2.2 エレクトロニクス
- USS,DB,MCBを新規に作成する。
USSは前方に用いる超音波センサのみより近距離を測定できるものを1つ購入する。
DBは現在FPGAボードとの接触が不安定なためCPU-FPGA間のようにはめ込める形に設計を行う。
MCBは小型化のため2つのボードを1枚のボードにまとめる。回路の内部の変更は行わない。
- 2.3 ソフトウェア
- MIRS競技会で成功するには、いかに確実なプログラムを製作できるかにあると考えたため、プログラムにより時間をかけることを考えている。中でも「正確な直進」は重要であると考えた。
正確な直進を行えるアルゴリズムを開発できれば、回転、旋回の精度もあがり、できる限り壁にぶつかることなく競技場を進むことができると考えた。標準プログラムでもある程度正確な直進ができるが、その引数が汎用性という点で適切ではないと考え、あらたに直進のプログラムを開発することにした。これに伴い、回転、旋回のプログラムも同様に独自開発することにした。
数字認識プログラムは書き換えが困難であるため、標準プログラムをベースとして、複数の数字を認識できるように作り替えることにした。
各障害物(小部屋やロータリーなど)の攻略についても我々独自の攻略法を用いたオリジナルのプログラムを作成することにした。
メリットとして、壁にぶつからないことによりスピーディーな走行を実現する。
またメインループのまわし方を工夫しセンサ値の変化に敏感に反応する。
3.システム外観図
-
基本的な形状は標準機から変更せず、小型化を図る。
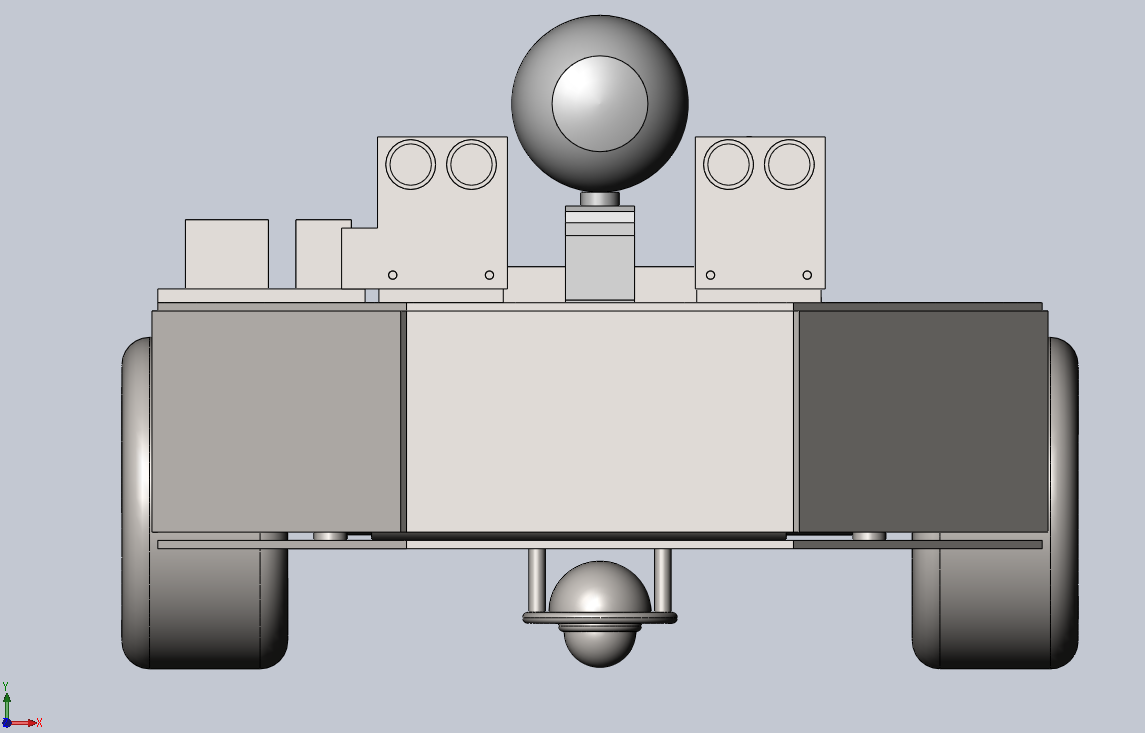 正面図
正面図
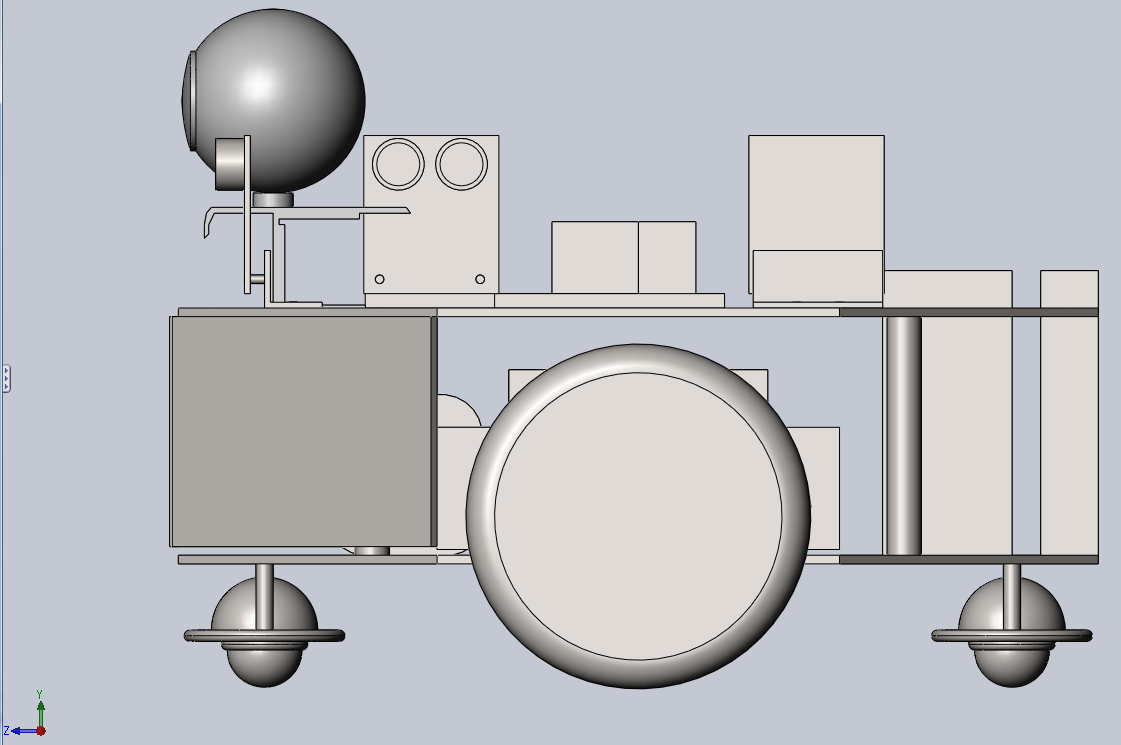 右側面図
右側面図
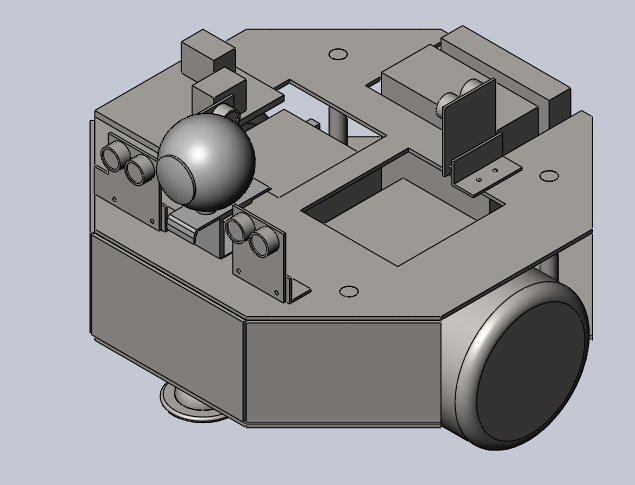 等角図
等角図
沼津工業高等専門学校 電子制御工学科