3.帋尡寢壥
3.1 揹尮儃乕僪
-
MIRS1205 昗弨儃乕僪帋尡寁夋彂 偺揹尮儃乕僪偺幚尡曽朄偵婎偯偒僥僗僩傪峴偭偨丅
傑偨丄巊梡婡婍偵偮偄偰傕昗弨儃乕僪帋尡寁夋彂偵廬偭偨丅
-
MIRSSTND 僨儏傾儖儗僊儏儗乕僞揹尮儃乕僪惢憿巇條彂 偺幚憰恾偲丄崱夞偺帋尡偱巊偆揹尮儃乕僪傪尒斾傋偰晹昳偺庢傝晅偗偺妋擣傪偟偨丅
偙偺偲偒丄R2丆R3偺掞峈偑偦傟偧傟1.5k兌丆4.7k兌偵曄峏偝傟偰偄偨偺偱丄偙偺忬懺偺弌椡揹埑偺抣傪應掕偟偨屻丄昗弨婡偺巇條(R2=2.0k兌丆R3=5.6k兌)偵曄峏偡傞偙偲偵偟偨丅
傑偨丄偦偺懠偺晹昳偵偮偄偰偼摿偵栤戣偼側偐偭偨丅
-
僥僗僞乕偵傛傞帋尡寢壥傪 昗弨儃乕僪帋尡寢壥[揹尮儃乕僪](摫捠帋尡) 偺昞偵傑偲傔偨丅
栚帇丆僥僗僞乕偵傛傞帋尡偼偳偪傜傕摿偵栤戣偼側偐偭偨丅
-
偙偺帋尡寢壥傪 昗弨儃乕僪帋尡寢壥[揹尮儃乕僪](摦嶌帋尡) 偺昞偵傑偲傔偨丅
昗弨婡巇條偺掞峈偺惂屼宯丆嬱摦宯偺揹尮弌椡偼偳偪傜傕栚昗偱偁傞抣(惂屼宯偼弌椡5.1[V],嬱摦宯偼弌椡6.1[V])傛傝0.3乣0.5[V]掱搙戝偒偐偭偨偑丄
夁搙偺戝偒偝偲偄偆傢偗偱偼側偄偨傔丄摿偵栤戣偼側偄偲敾抐偟偨丅
傑偨丄掞峈R2丆R3偺抣偑曄峏偝傟偰偄偨嶐擭偺揹尮儃乕僪偺惂屼宯偺弌椡揹埑偺棟榑抣傪寁嶼偟偰傒偨偲偙傠5.4[V]偲側偭偰偄偨丅
偙偺偲偒偺寁嶼幃偼MIRS媄弍挷嵏曬崘彂傪嶲徠偟偨丅
幚應抣偱妋擣偟偨傜5.8[V]偲側偭偰偄偨偺偱丄昗弨婡巇條偺惂屼宯偺弌椡揹埑傛傝0.4[V]掱搙憹偊偰偄傞偙偲偑傢偐偭偨丅
嶐擭偺婡懱偼挻壒攇僙儞僒傪捛壛偟偰搵嵹偟偰偄偨偨傔丄揹尮弌椡傪憹暆偝偣傛偆偲偟偨偺偱偼側偄偐偲峫偊傜傟傞丅
側偍丄弌椡揹埑偺栚昗抣偲幚應抣偵嵎偑弌偨偺偼丄CPU儃乕僪側偳傪愙懕偣偢偵應掕偟偨偨傔偱偁傞丅
3.1.1 晹昳僠僃僢僋
3.1.2 摫捠帋尡
3.1.3 摦嶌帋尡
3.2 僪乕僞儃乕僪
-
摦嶌帋尡偵偍偗傞昁梫婍嬶傪埲壓偵帵偡丅
- MIRSMG3D僪乕僞儃乕僪2枃丄CPU儃乕僪丄FPGA儃乕僪丄敀慄僙儞僒丄僞僢僠僙儞僒丄僨傿僗僾儗僀媦傃働乕僽儖丄僉乕儃乕僪丄埨掕壔揹尮傑偨偼僶僢僥儕乕2屄丄揹尮働乕僽儖
僪乕僞儃乕僪偺摦嶌帋尡偵偮偄偰偺娐嫬愝掕傗摦嶌庤弴偼丄MIRS1205 昗弨儃乕僪帋尡寁夋彂偺3.2.2 摦嶌帋尡偺崁傪嶲徠丅 偙傟偵婎偯偒丄摦嶌帋尡傪峴偭偨寢壥傪埲壓偵帵偡丅
-
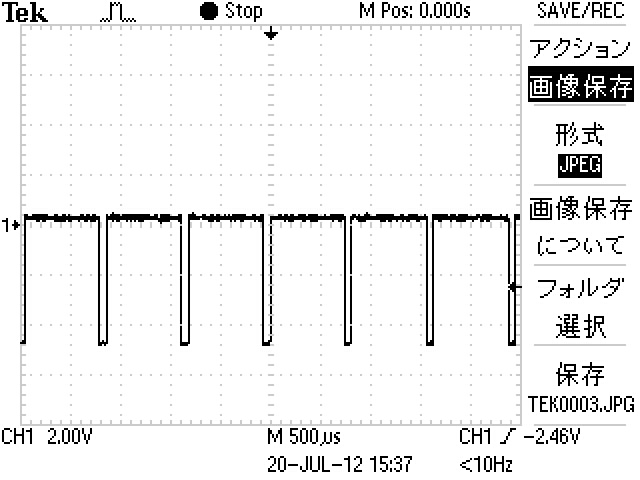
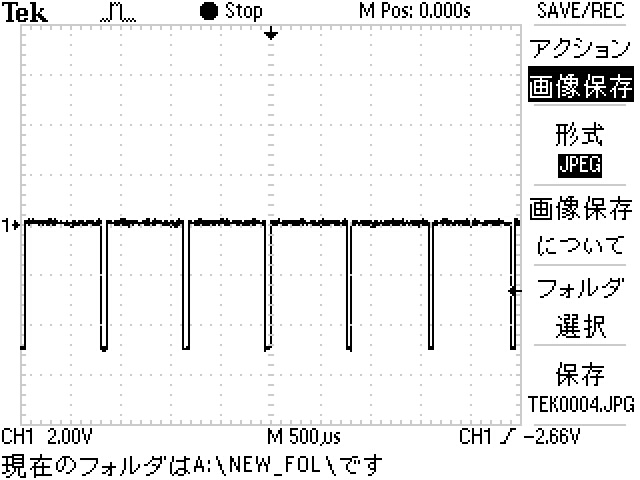
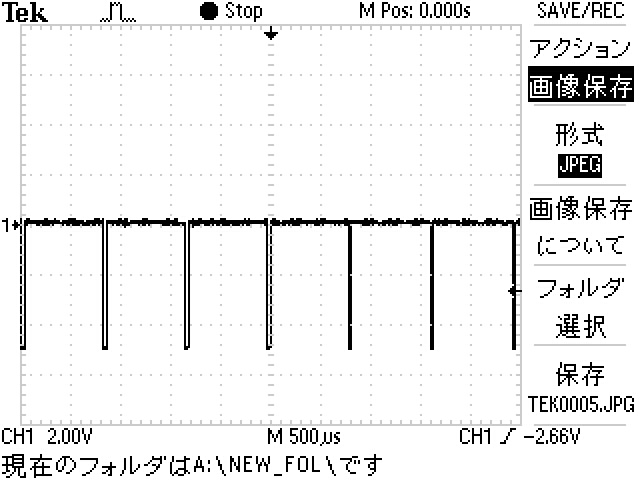
丒慡偰偺億乕僩偵僙儞僒傪庢傝晅偗側偄忬懺偱僾儘僌儔儉傪幚峴偟丄I/O[1乣8]丄TS[1乣4]偺偡傋偰偑侾偱偁傞偙偲傪妋擣丅
丒億乕僩堦偮偯偮偵僙儞僒傪愙懕偟偰丄愙懕偟偨億乕僩偑壗傕偟側偄忬懺偺偲偒怣崋侽偑弌椡偝傟傞偙偲傪妋擣丅
丒敀慄僙儞僒偵敀偄巻傪俆們倣掱搙壗夞偐嬤偯偗丄嬤偯偄偨偲偒偵怣崋偑侾偲弌椡偝傟丄棧偟偨偲偒偵侽偲弌椡偝傟傞偙偲傪5夞楢懕偱妋擣丅
丒億乕僩TS[2]埲奜偺僞僢僠僙儞僒偵娭偟偰丄僙儞僒偵怗偭偨偲偒偵侾偺怣崋偑弌椡偝傟傞偙偲傪5夞楢懕偱妋擣丅
FPGA偺塭嬁偱億乕僩偑侾偮摦嶌偟側偄傛偆側偺偱丄偦偺億乕僩偑偳偙偐傪挷傋偨寢壥丄僪乕僞儃乕僪忋抜偺TS[2]億乕僩偑惓忢偵摦嶌偟側偄偙偲偑敾柧偟偨丅
偙傟偼傝FPGA偺僶僌尨場偩偲偄偆偙偲側偺偱丄偦偺懠俁偮偺億乕僩傪僞僢僠僙儞僒偵巊梡偟丄TS[2]億乕僩偼巊梡偟側偄傕偺偲偟偰拲堄偡傞丅埲壓偵TS[2]億乕僩偺埵抲偺夋憸傪宖嵹偡傞丅
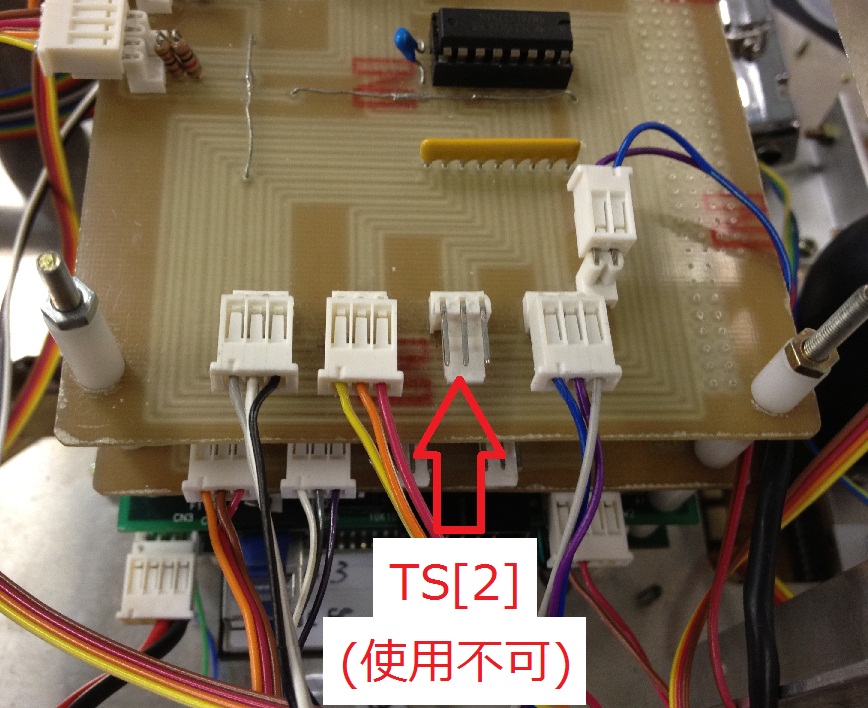 TS[2]億乕僩偺埵抲
TS[2]億乕僩偺埵抲
傑偨丄婛懚偺僾儘僌儔儉偱偼丄僙儞僒偺抣傪偲傞open("/dev/irs_ts_ws", O_RDONLY)偲偄偆晹暘偑while(1)偺慜偺峴偱巊梡偝傟偰偄偨偨傔偵丄僾儘僌儔儉傪幚峴偟偨偦偺弖娫偺僙儞僒偺抣傪孞傝曉偟偰昞帵偡傞傛偆偵側偭偰偟傑偭偰偄傞丅
偦偺偨傔丄僾儘僌儔儉傪while偺拞偱open偡傞傛偆偵彂偒姺偊丄僾儘僌儔儉幚峴拞偼拃師僙儞僒偺抣傪撉傒庢傟傞傛偆側僾儘僌儔儉偵偟偨丅埲壓偵曄峏屻偺僾儘僌儔儉傪宖嵹偡傞丅
曄峏屻偺僾儘僌儔儉
- 僪乕僞儃乕僪偼嫀擭偺傕偺傪棳梡偡傞偺偱摫捠帋尡偼徣棯偡傞丅
3.2.1 摦嶌帋尡
3.3 儌乕僞惂屼儃乕僪
3.3.1 摫捠帋尡
-
MIRS1205丂昗弨儃乕僪帋尡寁夋彂偺3.3.1 摫捠帋尡偺撪梕捠傝偵摫捠帋尡傪峴偭偨丅
帋尡傪峴偭偨儌乕僞惂屼儃乕僪偼怴婯偵嶌惉偟偨侾枃偵偮偄偰偱偁傝丄嶐擭MIRS1102偱巊梡偝傟偨儌乕僞惂屼儃乕僪偼帋尡偟偰偄側偄丅
巊梡婍嬶丗MIRSMG3D儌乕僞惂屼儃乕僪丄偼傫偩偛偰丄偼傫偩丄偼傫偩媧偄庢傝慄丄僥僗僞
摫捠帋尡偼栚帇偲僥僗僞偺2夞偺僠僃僢僋傪峴偭偨丅傑偨偙偺偲偒丄IC傪幚憰偣偢偵峴偭偨丅
寢壥偼栚帇丄僥僗僞乕偵傛傞帋尡偼偳偪傜傕摿偵偼栤戣側偐偭偨丅
3.3.2 摦嶌帋尡1
-
MIRS1205丂昗弨儃乕僪帋尡寁夋彂偺3.3.3 摦嶌帋尡1偺撪梕捠傝偵帋尡傪峴偭偨丅
USART.hex傪PIC偵彂偒崬傒僔儕傾儖捠怣偺僥僗僩傪峴偆偨傔偵
MIRSMG3D MTCB帋尡巇條彂偐傜帋尡梡僾儘僌儔儉傪夝搥偟丄偦偺拞偵偁傞
siotest.c偲偄偆Linux梡傾僪儗僗巜掕傾僋僙僗僾儘僌儔儉乮僔儕傾儖捠怣夞楬梡偵挷惍嵪傒乯
傪梡偄僔儕傾儖捠怣偑惓偟偔摦嶌偟偰偄傞偺偐傪僥僗僩偟偨丅偙偺僥僗僩偼偆傑偔摦嶌偟側偐偭偨偑
MIRSMG3D 憱峴惂屼帋尡僾儘僌儔儉偺憱峴惂屼帋尡僾儘僌儔儉偱偁傞motor_test傪幚峴偟偨偲偙傠僾儘僌儔儉捠傝偵摦嶌偟偨偨傔
僔儕傾儖捠怣偑惓偟偔摦嶌偟偰偄傞偲妋擣偱偒偨丅
3.3.3 摦嶌帋尡2
-
MIRS1205丂昗弨儃乕僪帋尡寁夋彂偺3.3.3 摦嶌帋尡2偺撪梕捠傝偵帋尡傪峴偭偨丅
MIRSMG3D MTCB帋尡巇條彂偵偁傞帋尡梡僾儘僌儔儉偺RE.hex傪PIC偵彂偒崬傒丄儘乕僞儕僄儞僐乕僟撉傒庢傝晹偺僥僗僩傪峴偭偨丅
巊梡婍嬶丗MIRSMG3D儌乕僞惂屼儃乕僪乮俀枃乯丄揹尮儃乕僪丄僪乕僞儃乕僪丄揹埑埨掕壔揹尮憰抲丄NiCd僶僢僥儕乕
寢壥丄庤摦偵傛偭偰儌乕僞傪夞揮偝偣傞偲儌乕僞惂屼儃乕僪偺LED1偑惓揮側傜揰摂丄媡揮側傜徚摂偡傞偙偲傪妋擣偟偨丅
偙傟偵傛傝儘乕僞儕僄儞僐乕僟撉傒庢傝晹偵偮偄偰傕晄嬶崌偑側偄偙偲傪妋擣偟偨丅
3.3.4 摦嶌帋尡3
-
MIRS1205丂昗弨儃乕僪帋尡寁夋彂偺3.3.3 摦嶌帋尡3偺撪梕捠傝偵帋尡傪峴偭偨丅
MIRSMG3D MTCB帋尡巇條彂偵偁傞帋尡梡僾儘僌儔儉偺PWM.hex傪PIC偵彂偒崬傒丄儌乕僞惂屼晹偺僥僗僩傪峴偭偨丅
巊梡婍嬶丗僆僔儘僗僐乕僾丄MIRSMG3D儌乕僞惂屼儃乕僪乮俀枃乯丄揹尮儃乕僪丄僪乕僞儃乕僪丄揹埑埨掕壔揹尮憰抲丄NiCd僶僢僥儕乕丄揹尮働乕僽儖丄怣崋慄
嵟弶偵丄忋婰偺巊梡婍嬶傪MIRS1102 夝懱曬崘彂偺乽壓抜僔儍乕僔偺夝懱3.1丂MTCB(儌乕僞乕僐儞僩儘乕儖儃乕僪)偺庢傝奜偟乿偵宖嵹偟偨
MIRSMG3D儌乕僞惂屼儃乕僪偺幨恀媦傃丄MIRSMG3D MTCB惢憿巇條彂傪嶲峫偵攝慄偟偨丅壓偵攝慄偵偮偄偰弎傋傞丅
{kind=link}