はじめに
本ドキュメントは、 MIRS1302 の解体について記したドキュメントである。
今回解体機にMIRS1302の機体を選択した理由は以下である。
- 標準機に加えて追加した部品が多数ありこれらを流用することは今年度のMIRS設計に有効に作用することと判断した。
- 上記のように追加した部品が多くあるものの、機体自体は標準機をベースとし今年度の開発において自分たちの工夫がしやすいと判断した。
MIRS1302の解体に協力した人は以下である。
- 石井 建至(写真・動画撮影、解体)
- 海老名 恭平(写真・動画撮影)
- 加藤 慶悟(解体)
- 高村 征聖(解体)
- 萩原 実可子(解体)
- 早川 弘晃(解体)
また、MIRS1302を解体した手順は以下の取り外しの順番である。
全体図
全体図をFig.1、Fig.2、Fig.3、Fig.4、Fig.5、Fig.6に示す。
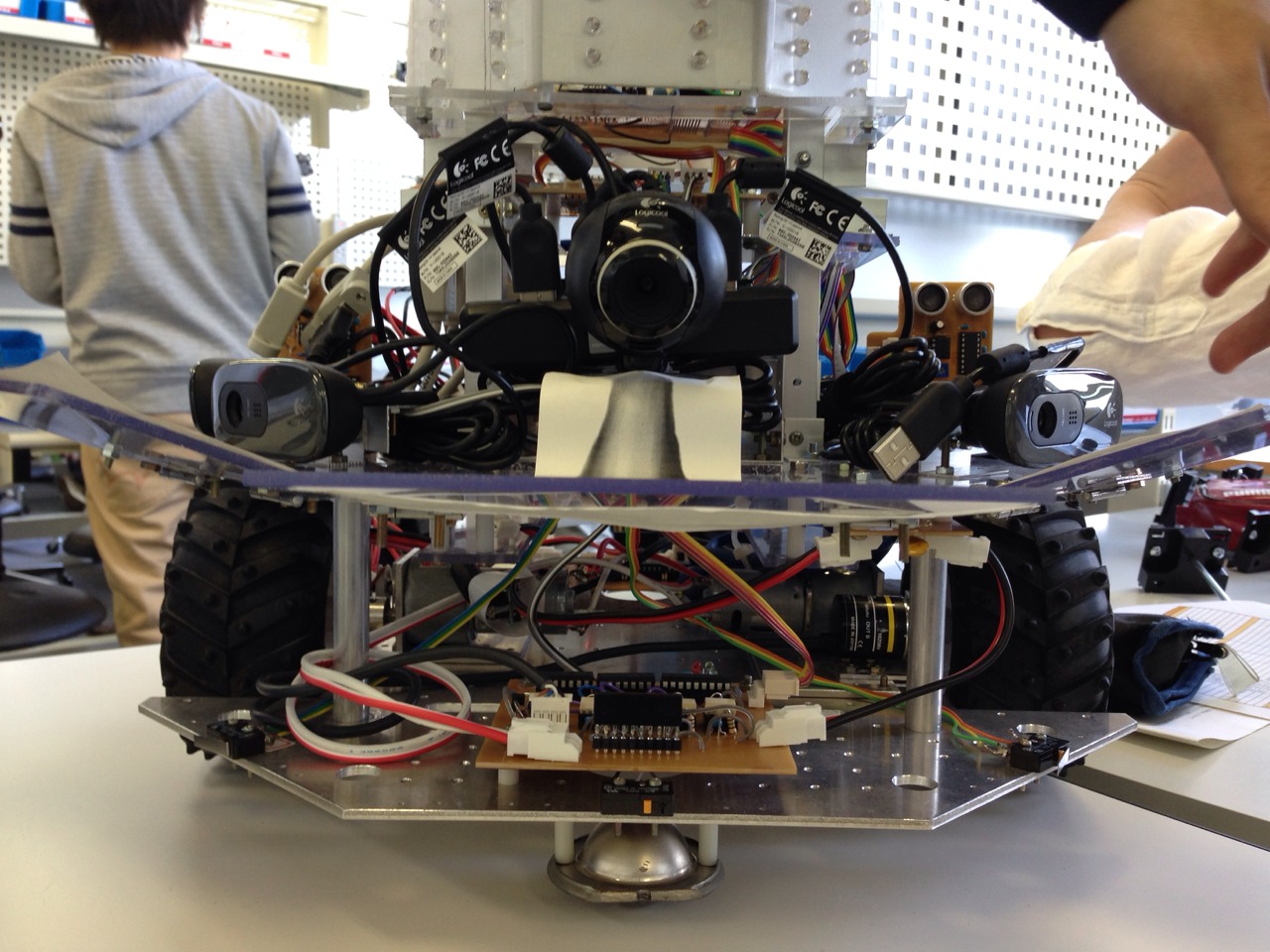
Fig.1 正面
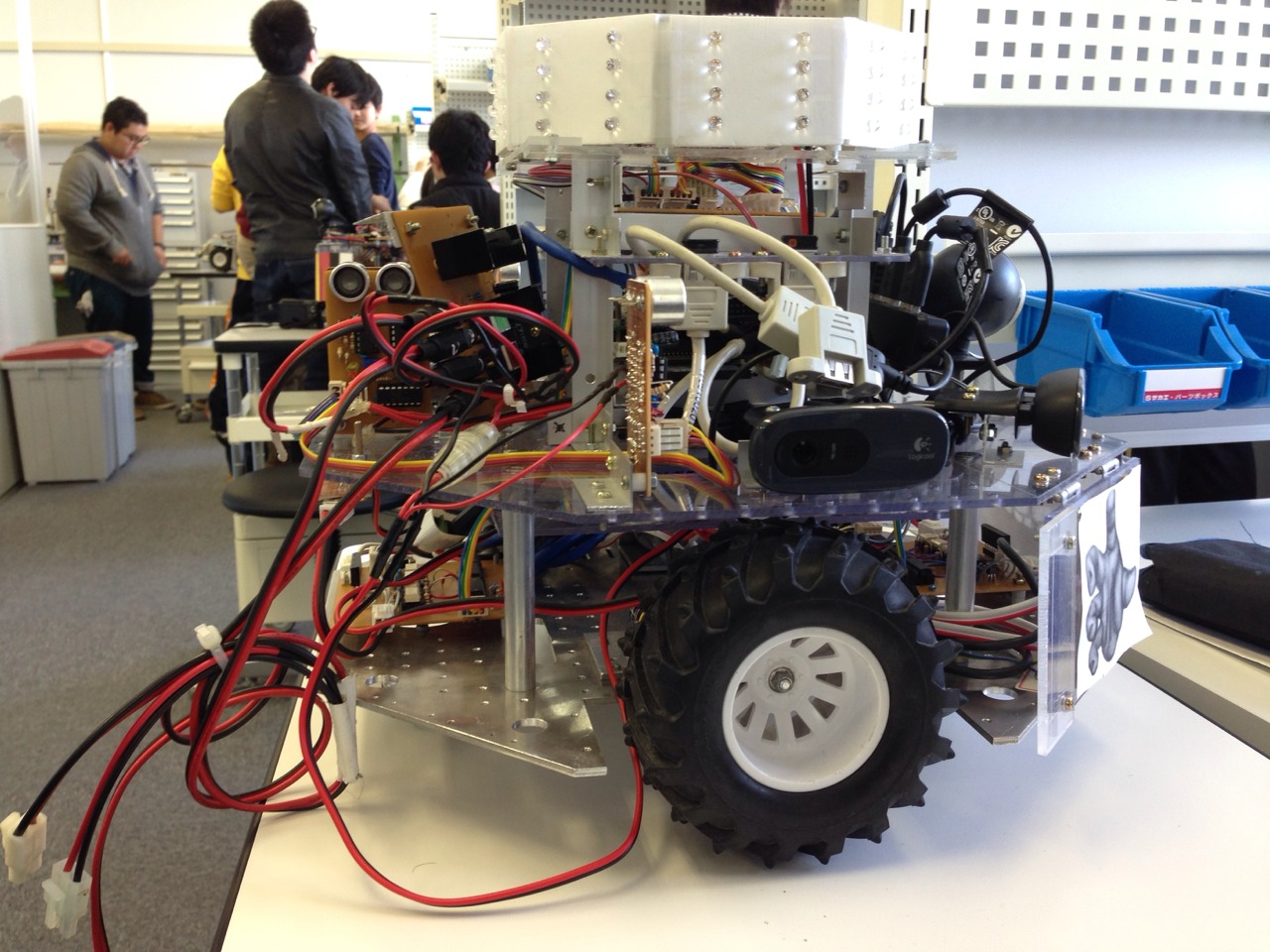
Fig.2 側面(右)
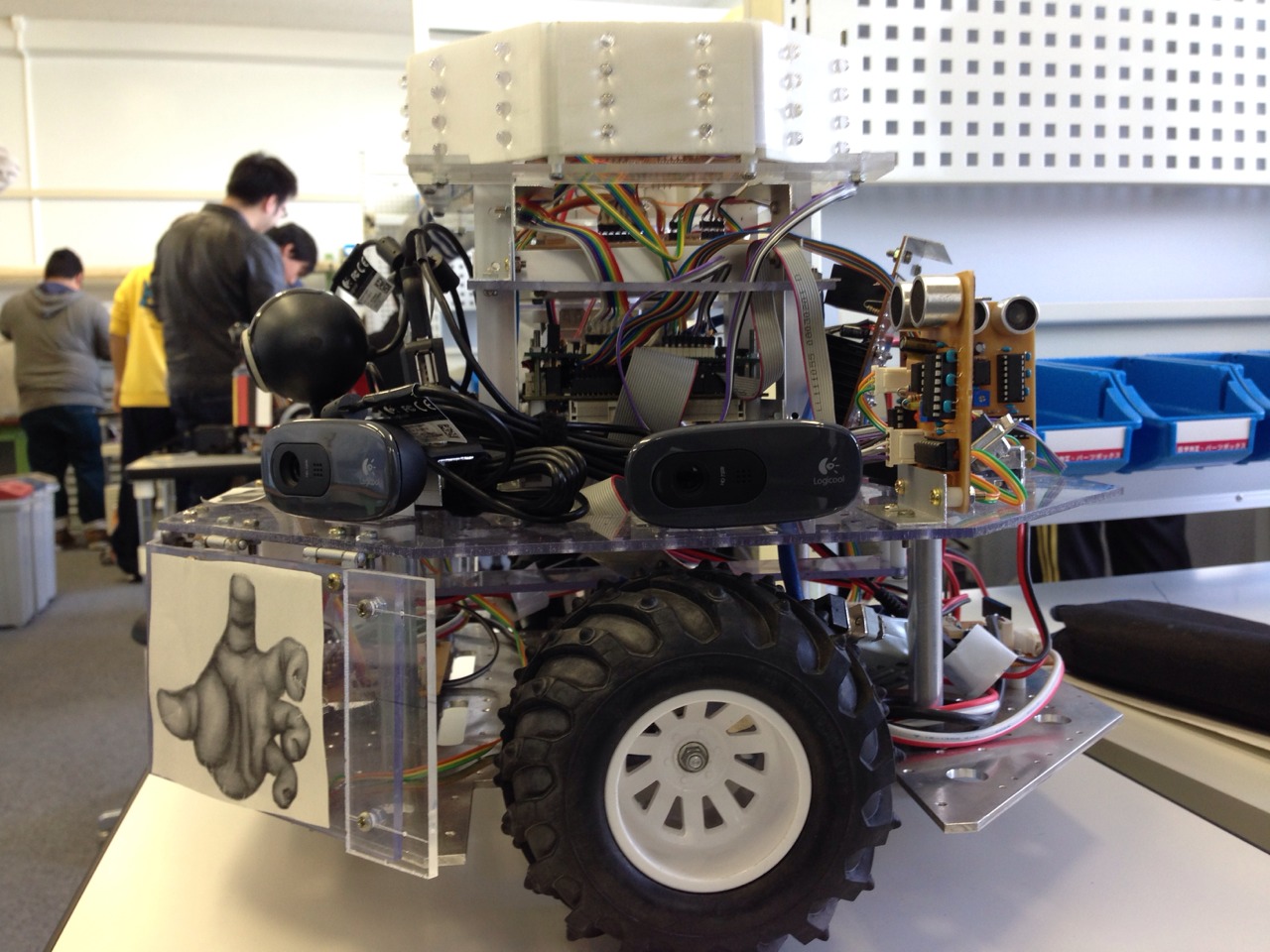
Fig.3 側面(左)
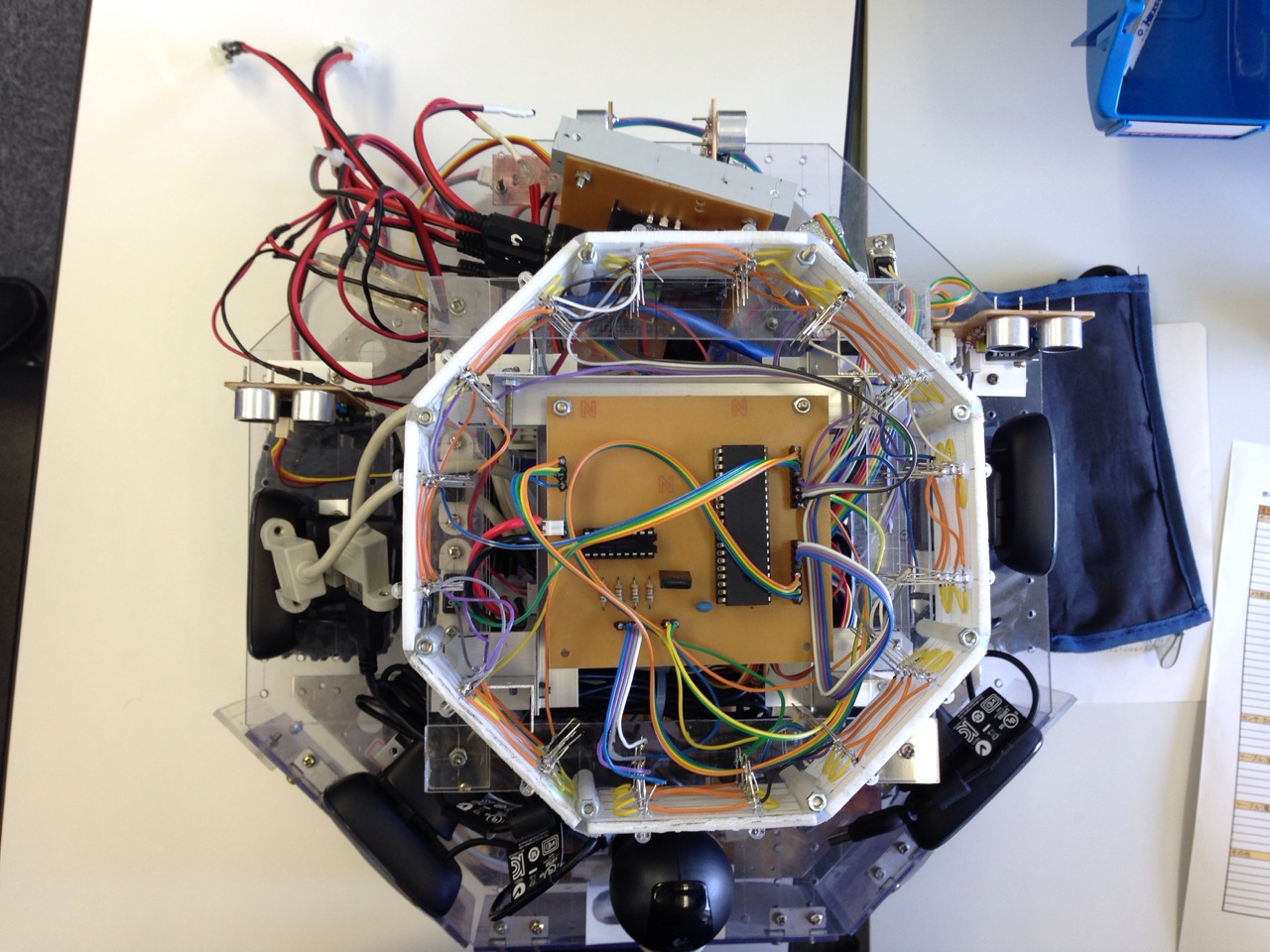
Fig.4 上面
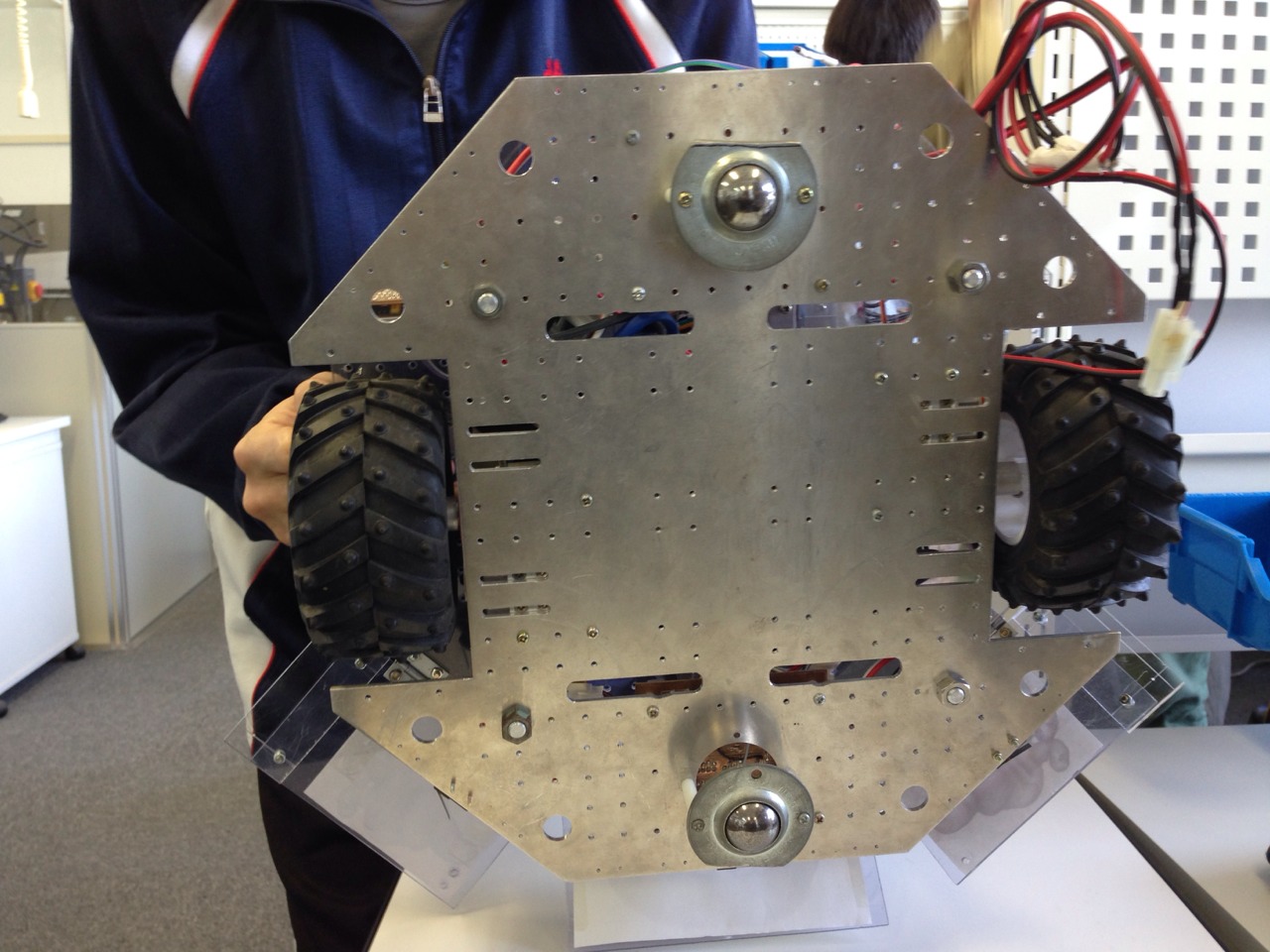
Fig.5 下面
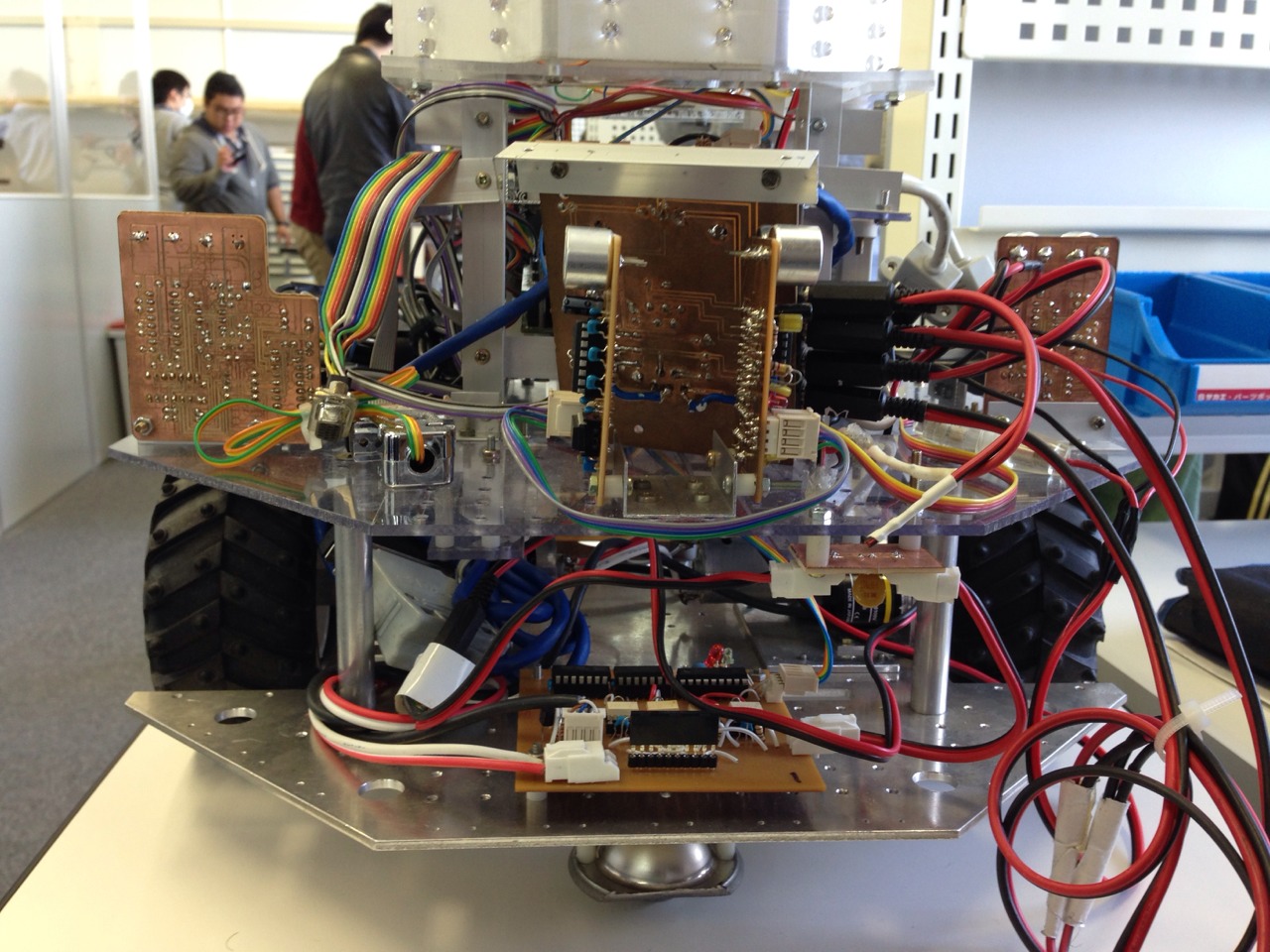
Fig.6 背面
- カメラが5台も搭載されていて撮影範囲が広い。
- ケーブルの収納が荒く、どこに何が接続されているのかが確認しにくかった。
上段シャーシの解体
カメラの取り外し

Fig.7 標準USBカメラ
Fig.8 オプションUSBカメラ
Fig.9 USBハブ
- MIRS1302にはFig.7のカメラ (MIRSMG3D 部品表-上段シャーシ-カメラ周辺-カメラ) 1台とFig.8(LOGICOOL製 C-270)のカメラ4台が備えられていた。
- 2つのカメラは両方、 金具 で固定されていて、ドライバーを使い、ネジをとり、簡単に上段シャーシから取り外すことができた。
- 複数個カメラを使うことですばやく怪盗を見つけることが可能となると思われる。
- Fig.9のようなUSBハブ(BUFFALO製)はUSBカメラの接続のために使用されていたと考えられる。
LED装飾・ドータボードの取り外し
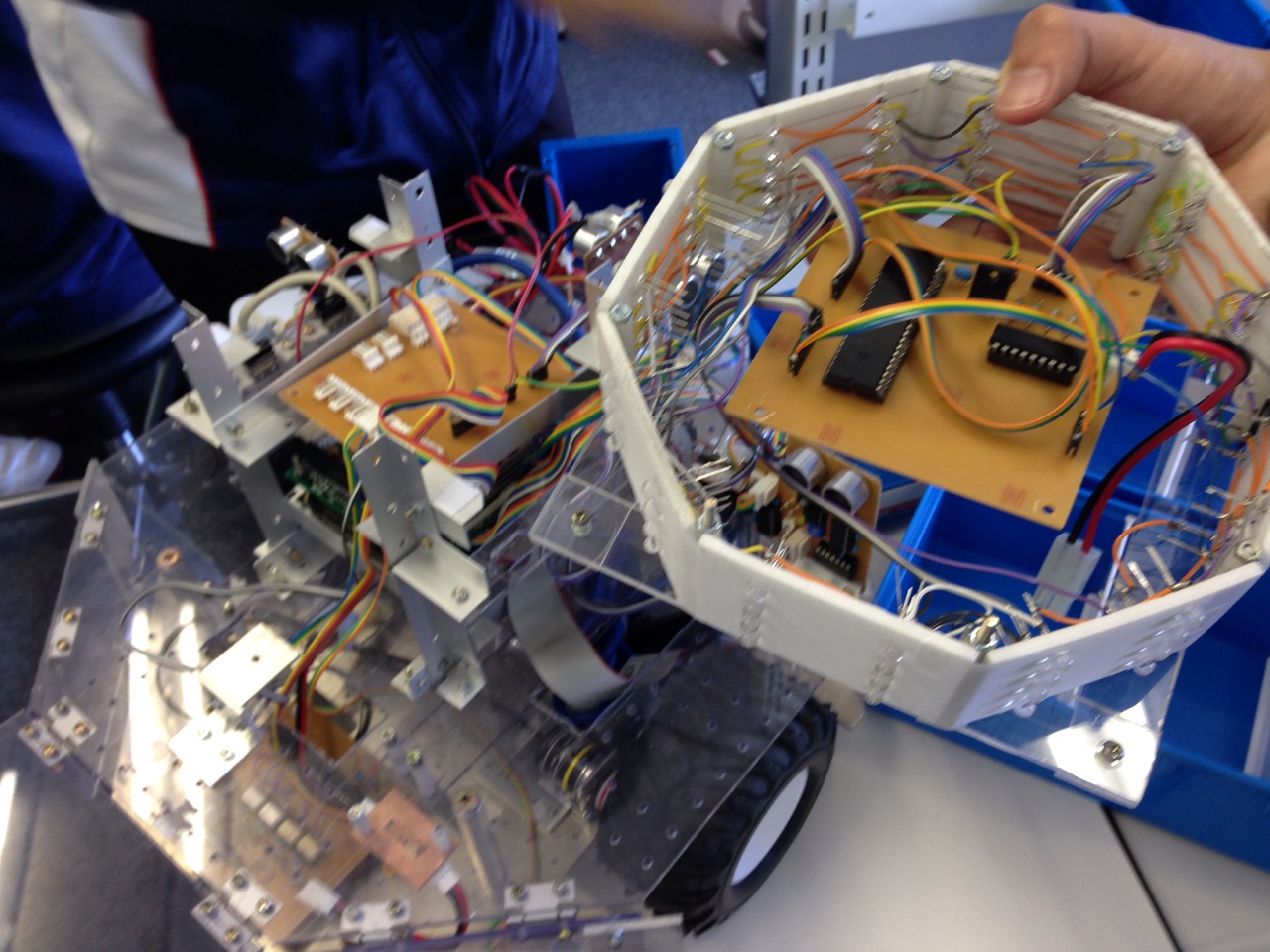
Fig.10 取り付け位置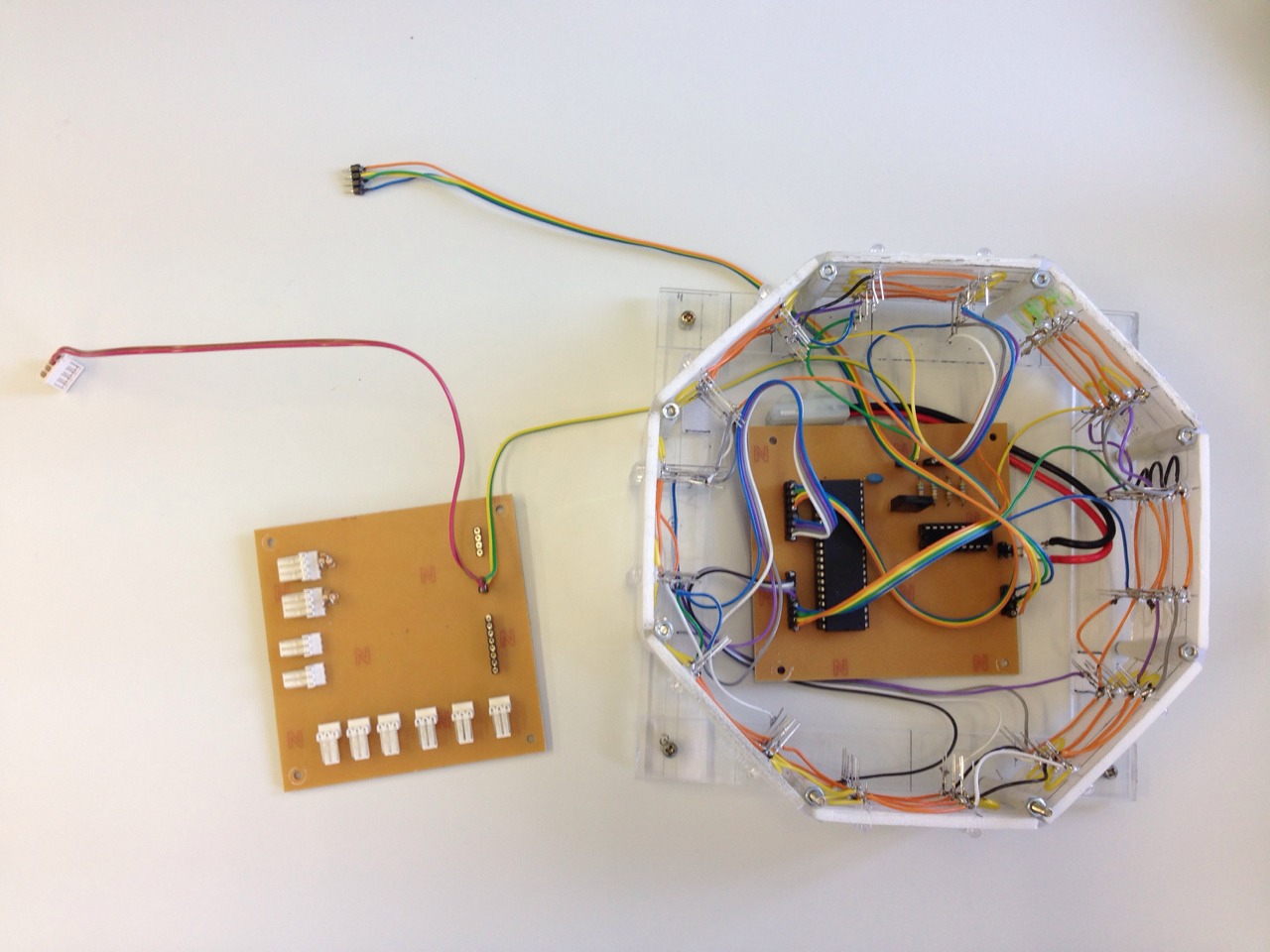
Fig.11 LED装飾・ドータボード
- Fig.10により LED装飾 と オリジナルのドータボード の取り付けられていた位置がわかる。
- MIRS1302 システム基本設計書 により、LED装飾がどのような意味で動作するのかがわかる。
- 上段シャーシの一番上にはLEDが沢山ついていた。このLEDは縦一列を光らせ、1秒間隔で反時計回りをするようにプログラムを組んでいるようだ。
- Fig.11のLED装飾はMIRS1302チームによって新規に作成されたものであり、以下の構想を実現するために作成された。
- 状態ごとに光り方を決め、瞬時に機体の状態を判断できるようにする。
- 見た目を良くする。
- 状態ごとに光り方を決め、瞬時に機体の状態を判断できるようにする。
- LED装飾・ パフォーマンス用ボード は MIRS1302オリジナルの金具 で固定されていた。
- LED装飾を使用するために、MIRS1302のオリジナルシステムにおけるパフォーマンス用ボードを作成していた。これは、Fig.11の八角形の形の物
の内側にあるボードがパフォーマンス用ボードである。 - ドータボードは標準機は2枚だが、実際は1枚しかなかった。オリジナルシステムの使用の用途以外には使われていないようだった。ただし、今年から
FPGAボードを変更する関係で ドータボード を新しく製作する必要がある。この作業は標準ボードプロジェクトチーム(参考: MIRS14SF 授業資料リンク ドキュメントレビューと承認 )
がサンプルを作成し、そのサンプルを元にチームでドータボード作成を行う。
超音波センサの取り外し
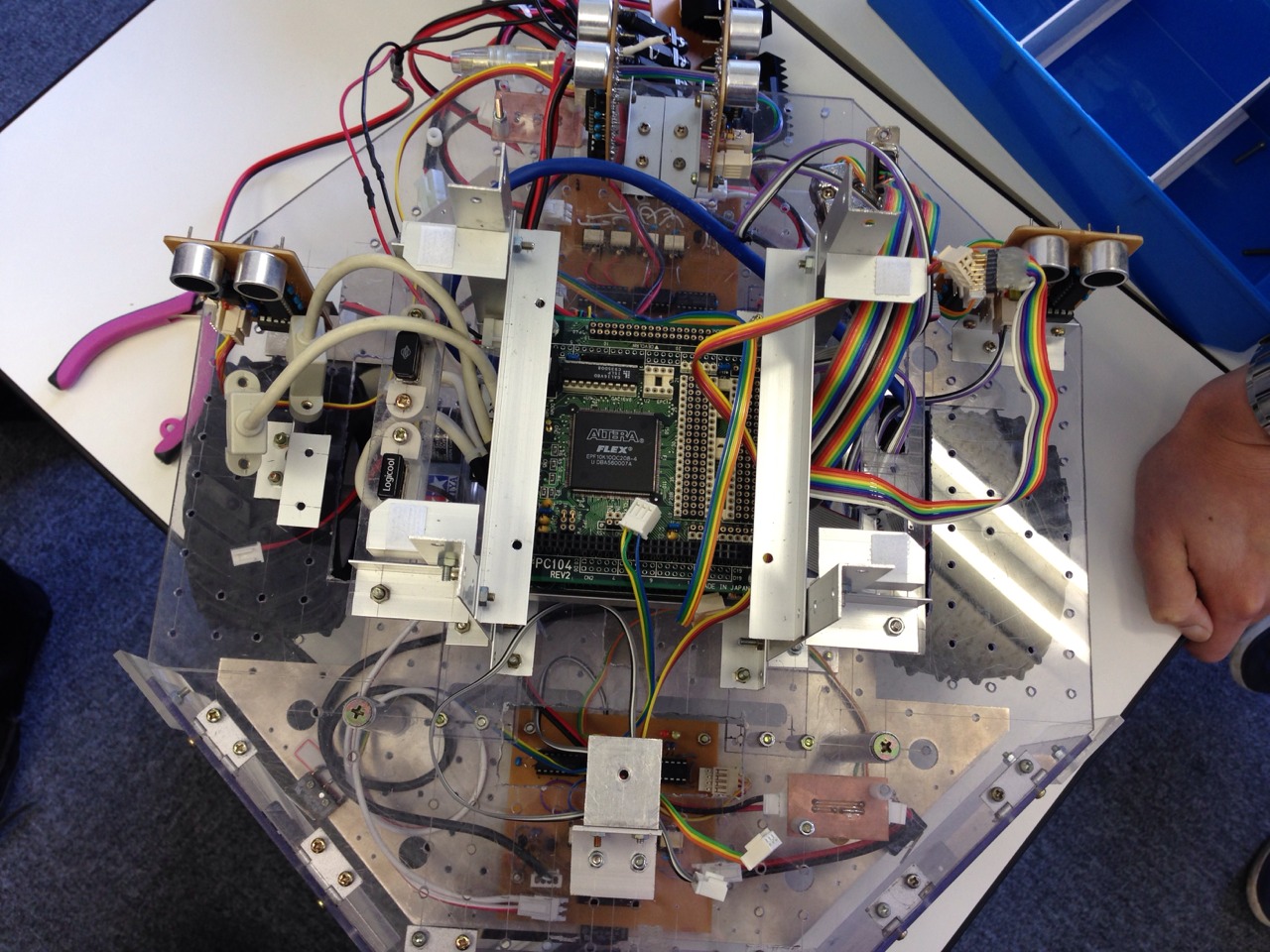
Fig.12 超音波センサ取り付け位置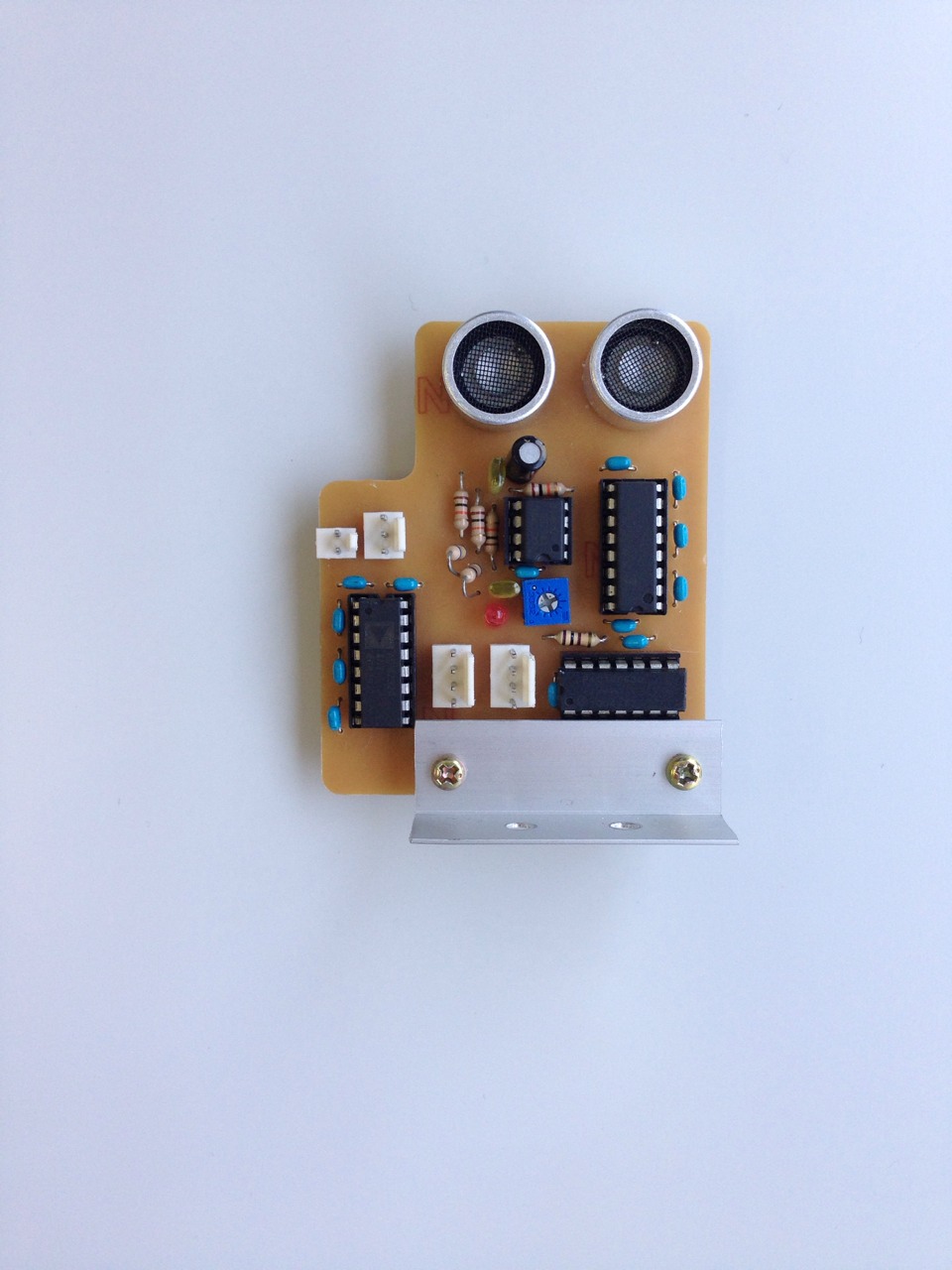
Fig.13 超音波センサ 親機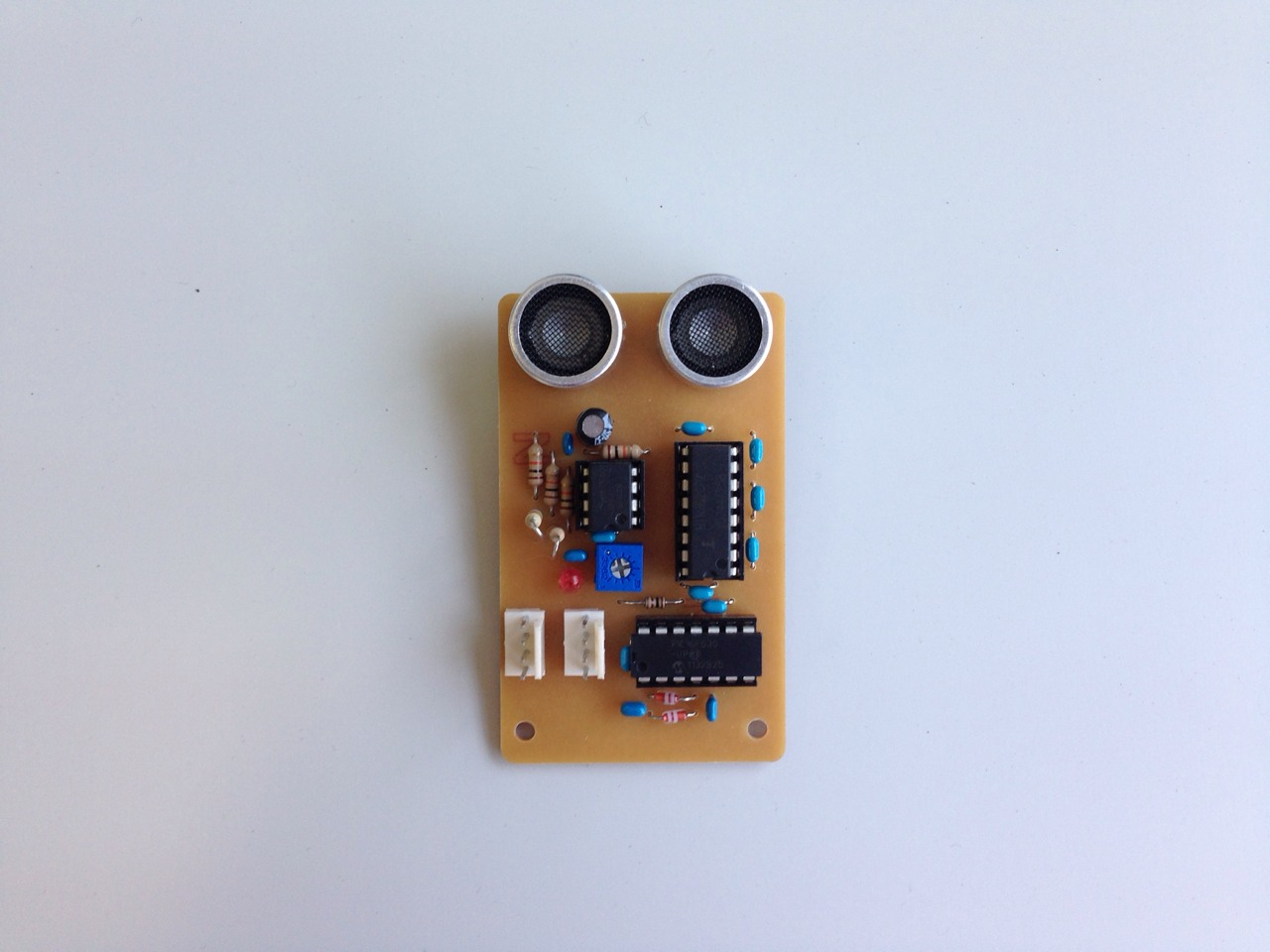
Fig.14 超音波センサ 子機
- 超音波センサはFig.12より前方に2つ、左右に1つずつ、計4つの
超音波センサ
を使用していた。超音波センサは親機(Fig.13)が1台、
子機(Fig.14)が3台備わっていて、機体と壁が平行かどうかを調べるセンサである。 - 超音波センサを2つから4つに増やすことで壁との衝突を回避し、安定した走行を実現しようとしたと思われる。
- 4つの超音波センサはL字の 標準の金具 で固定されていてドライバーで簡単に取り外すことができた。
- MIRS1302 超音波センサ動作試験結果
[親機]
壁と水平にして測定したとき、20cmから200cmまで誤差5%以内で測定することができ、300cm近くまで計測ができた。
壁を水平、仰角方向に回転させた場合、角度を大きくするほど精度は落ち、20cmから75cmでは水平方向±45度の範囲で測定できた。
[子機]
壁と水平にして測定したとき、20cm、75cm、100cm、200cmでは誤差5%以内で測定することができたが、50cmを測定したとき
稀に「21」が出力されることがあった。300cm近くまで計測ができた。
壁を水平、仰角方向に回転させた場合、角度を大きくするほど精度は落ち、20cmから50cmでは水平方向±45度の範囲で測定できた。
- 超音波センサはFig.12より前方に2つ、左右に1つずつ、計4つの
超音波センサ
を使用していた。超音波センサは親機(Fig.13)が1台、
FPGAボード、CPUボードの取り外し
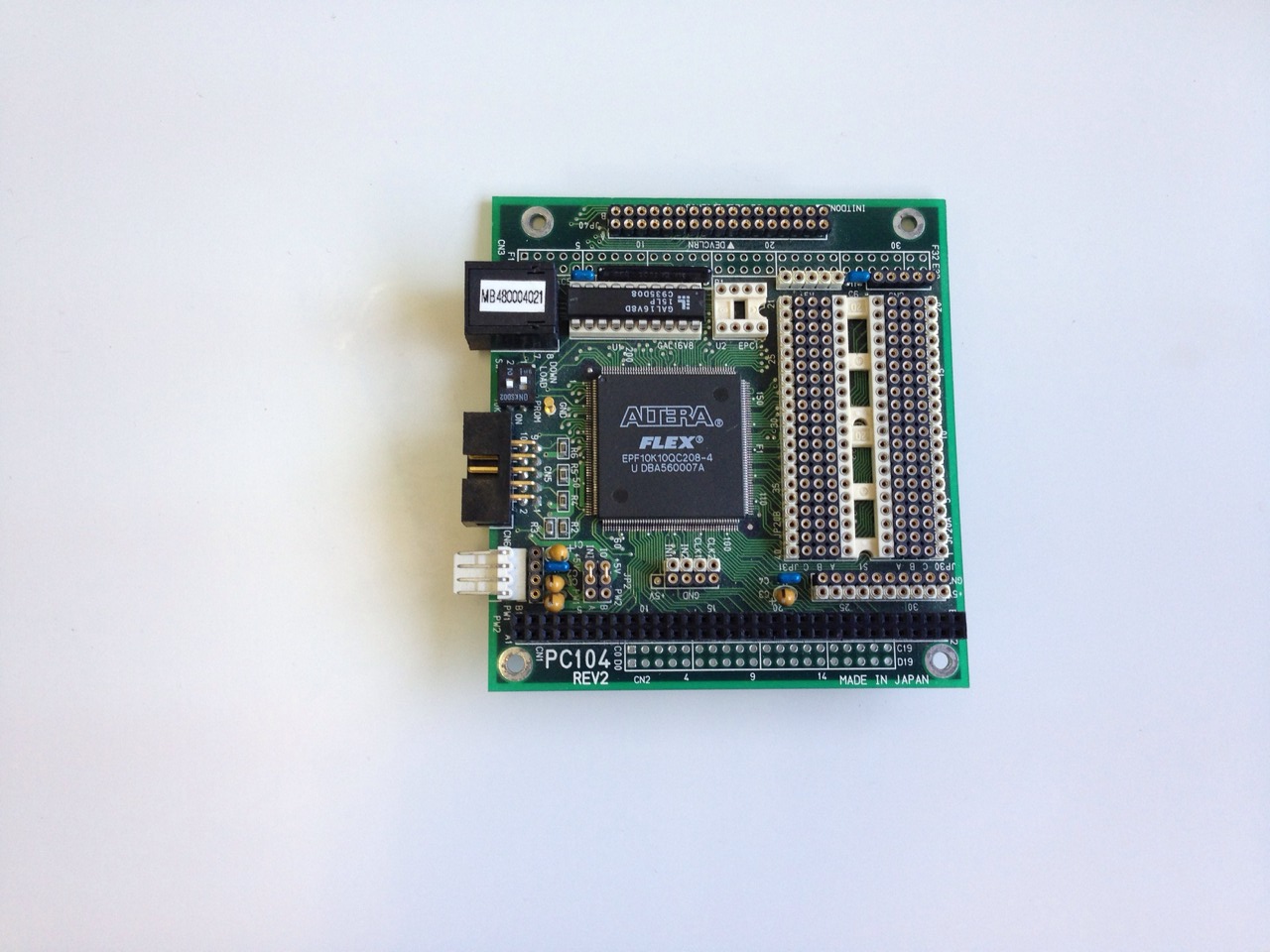
Fig.15 FPGAボード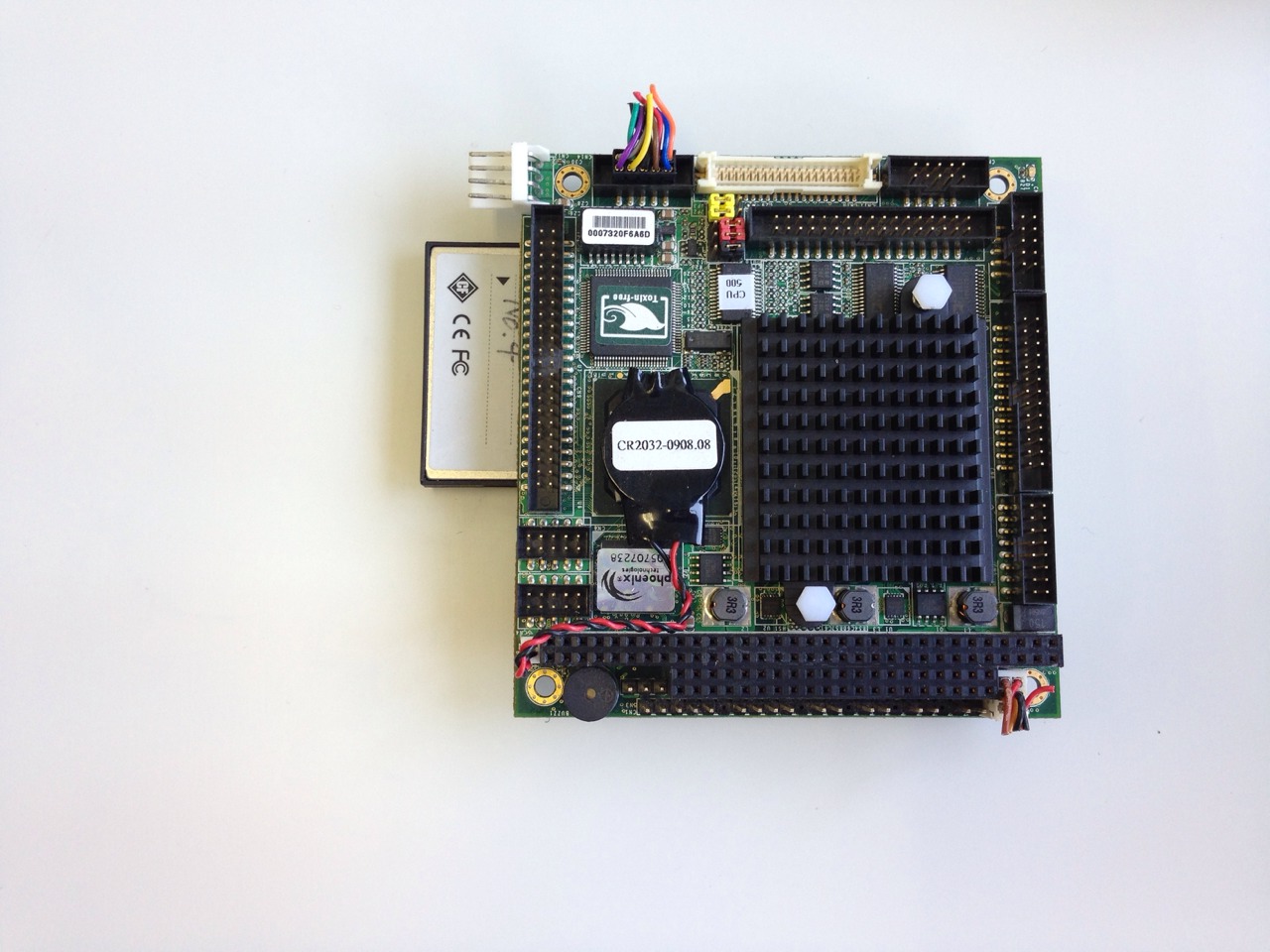
Fig.16 CPUボード
- FPGAボードとCPUボード(参照: MIRSMG3D 部品表-上段シャーシ-ラック周辺 )は標準機と同じものであった。
- FPGAボードはFig.15、CPUボードはFig.16である。この2つのボードは上段シャーシ機体中心部にあり、上からFPGAボード、CPUボードの順に重ねて
取り付けられていた。 - FPGAボードとCPUボードが繋がっているピンのところは深くまで入っていたため取り外しにくかった。
- FPGAボードとCPUボードは MIRS1302オリジナルの金具に囲まれ、固定されていた。
- FPGAボードは今年度"MS104-FPGA/CⅢ"に新しく変更される。(参照: MIRS14SF 授業資料リンク ドキュメントレビューと承認 )
上段シャーシの取り外し
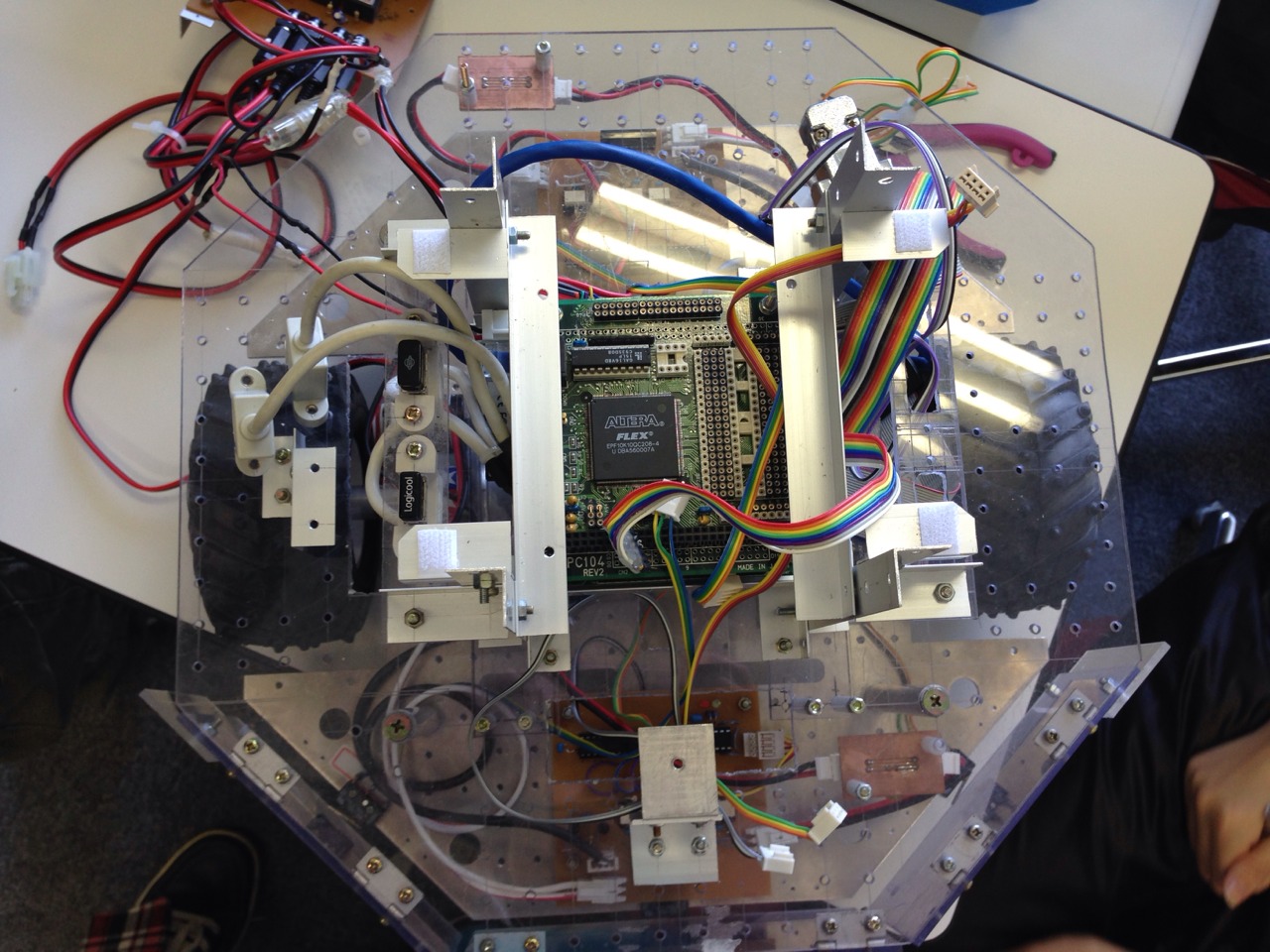
Fig.17 取り付け位置
Fig.18 上段シャーシ
- 上段シャーシ はFig.17のように固定され、LED装飾、ドータボード、パフォーマンス用ボード、FPGAボード、CPUボードを支えていた。
- 上段シャーシには塩ビ板(3mm)に変更し、軽量化することでモーターの負担を減らすように設計されていた。(参照: MIRS1302 システム提案書-メカ変更点 )
- 塩ビ板への変更することで機体内部への視認性の向上が思われる。
バンパの取り外し
Fig.19 フロントのバンパ
Fig.20 サイドのバンパ
- このバンパ(参考: MIRS1302 標準部品製作計画書-バンパ )はドキュメントに記載されていなかったためMIRS1302は前の年にて作成されたバンパ引き継いで使用しているものと思われる。
- 塩ビ板を使用し軽量化を図っていたと思われる。
下段シャーシの解体
支柱の取り外し

Fig.21 支柱
- 支柱 は標準機で使用されているものと変わらなかった。
モーター制御ボードの取り外し
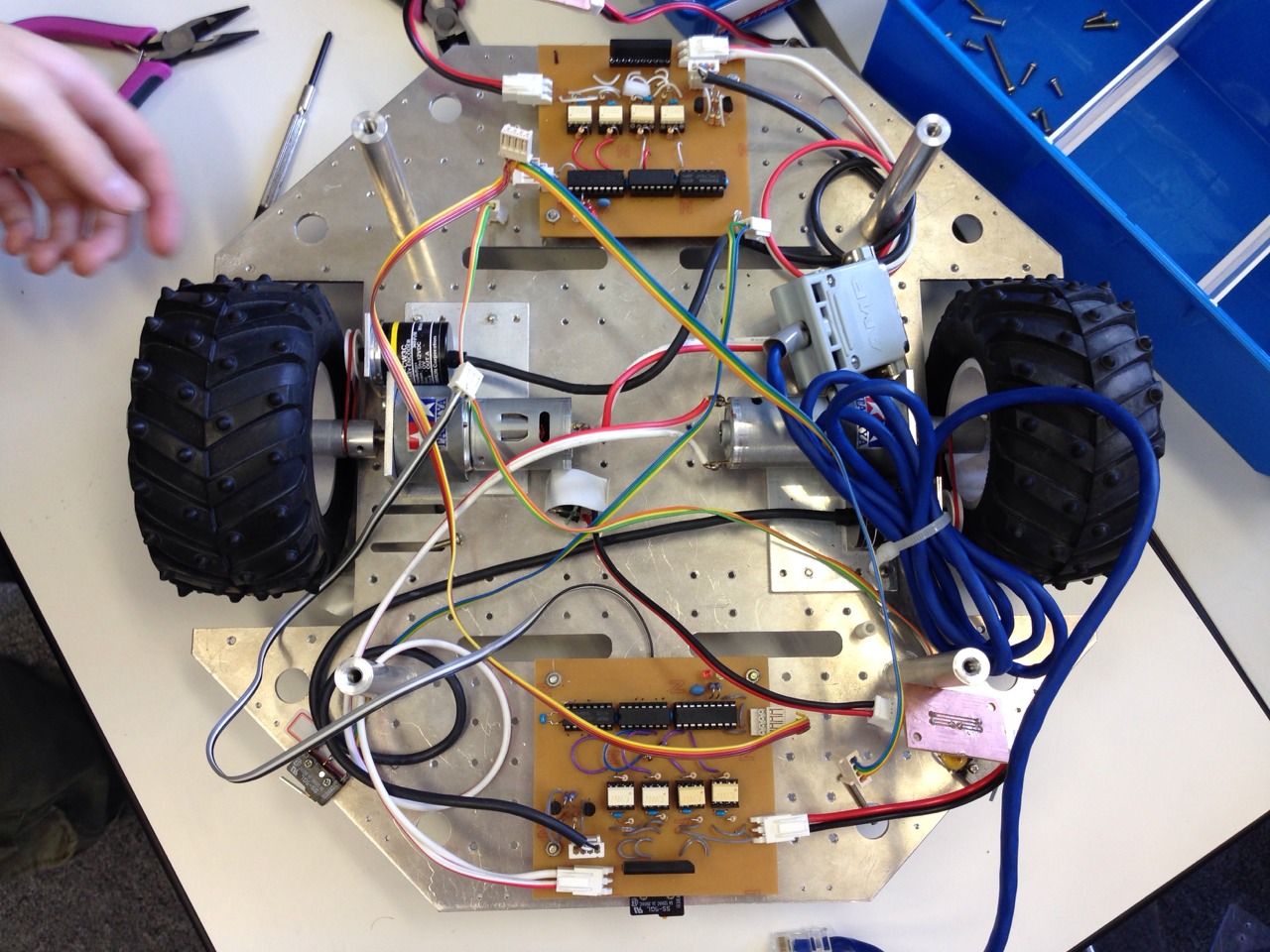
Fig.22 取り付け位置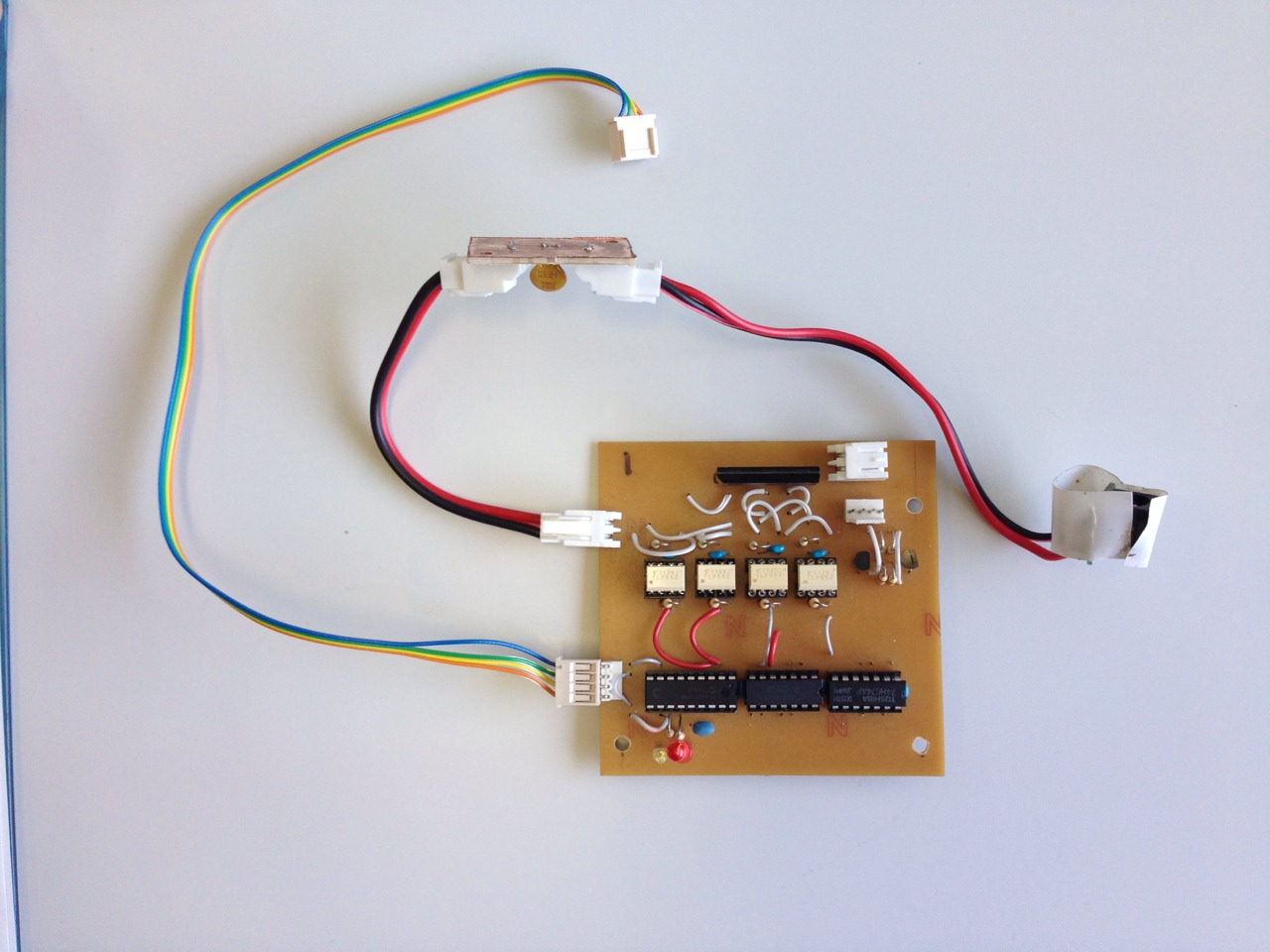
Fig.23 モーター制御ボード
- モーター制御ボード は下段シャーシに2枚直接取り付けられていた。
- モーター制御ボードに接続されている黒い配線はロータリエンコーダへ、白・赤色の配線はモーターに接続されていた。
- モーター制御ボードは標準機と同様のボードであった。だが。FPGAボードを変更する関係で
モーター制御ボード
は新たに作成する必要がある。
この作業は標準ボードプロジェクトチームがサンプルを作成し、そのデータを元にチームで新たに作成する。(参考: MIRS14SF 授業参考リンク ドキュメントレビューと承認 )
タッチセンサの取り外し
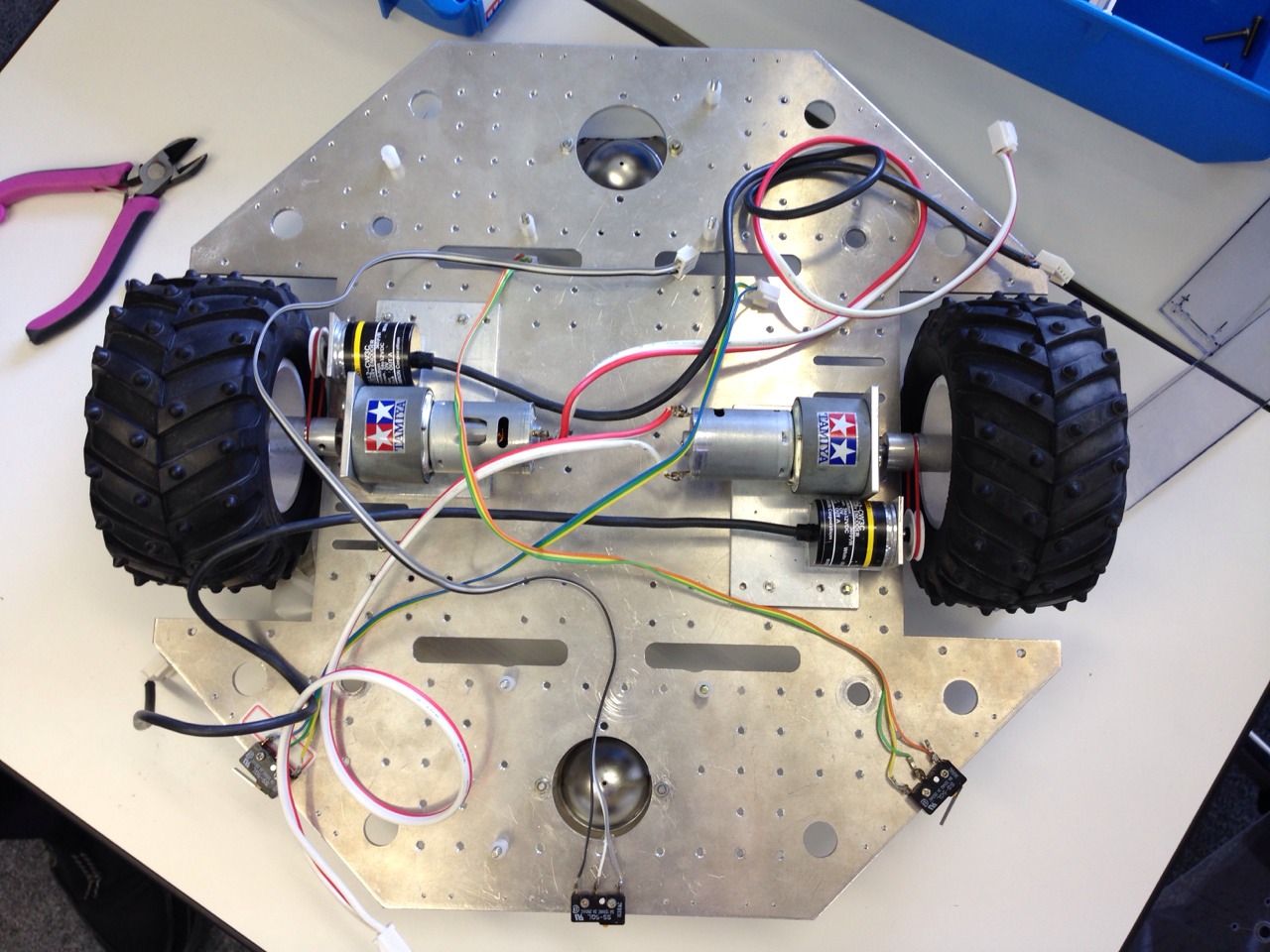
Fig.24 取り付け位置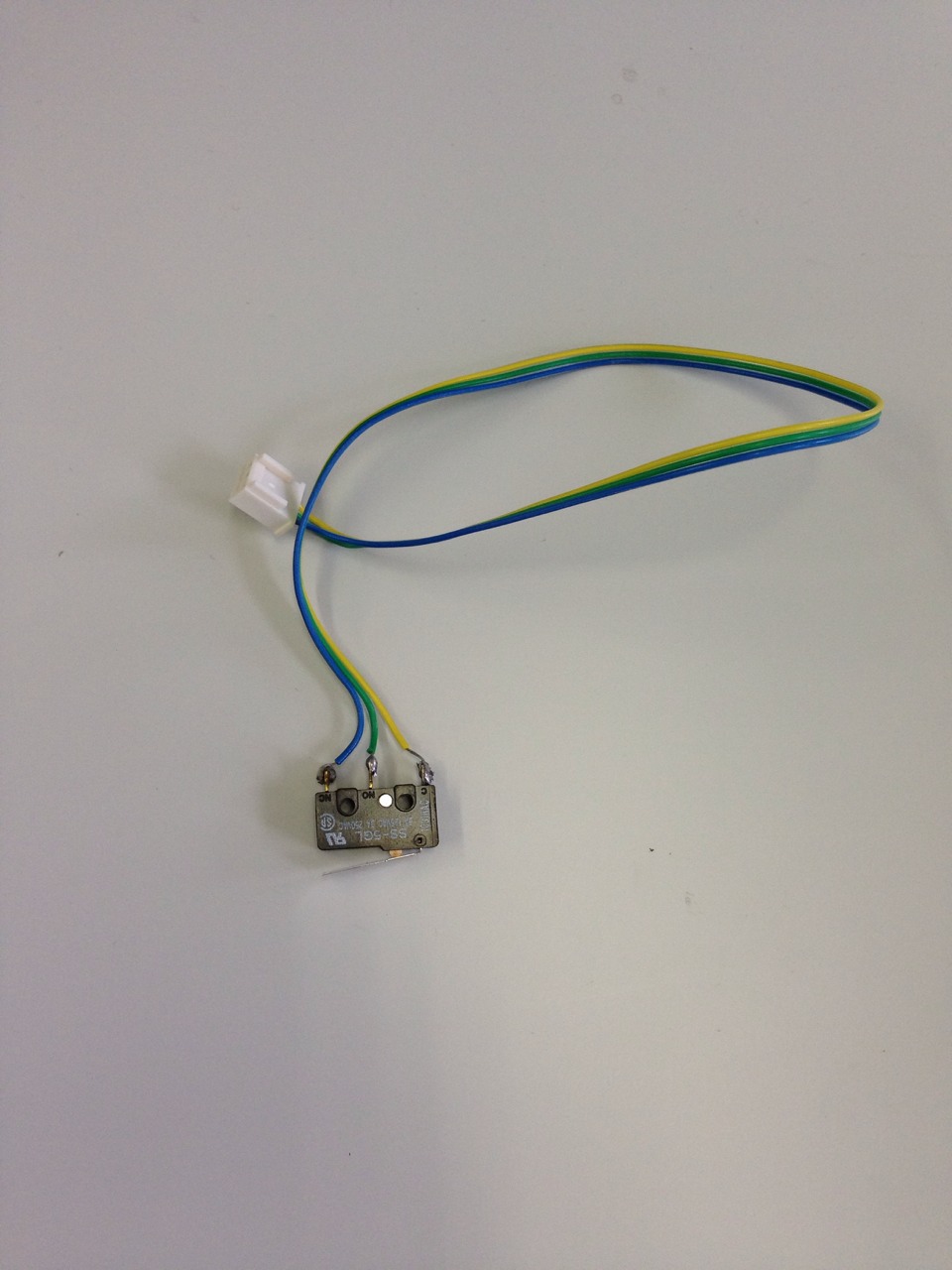
Fig.25 タッチセンサ
- タッチセンサ(参照: MIRSMG3D 部品表-タッチセンサ )はFig.24のように下段シャーシに3個直接取り付けられていた。
- MIRSMG3Dの標準部品である。
タイヤ、モーター、ロータリエンコーダの取り外し
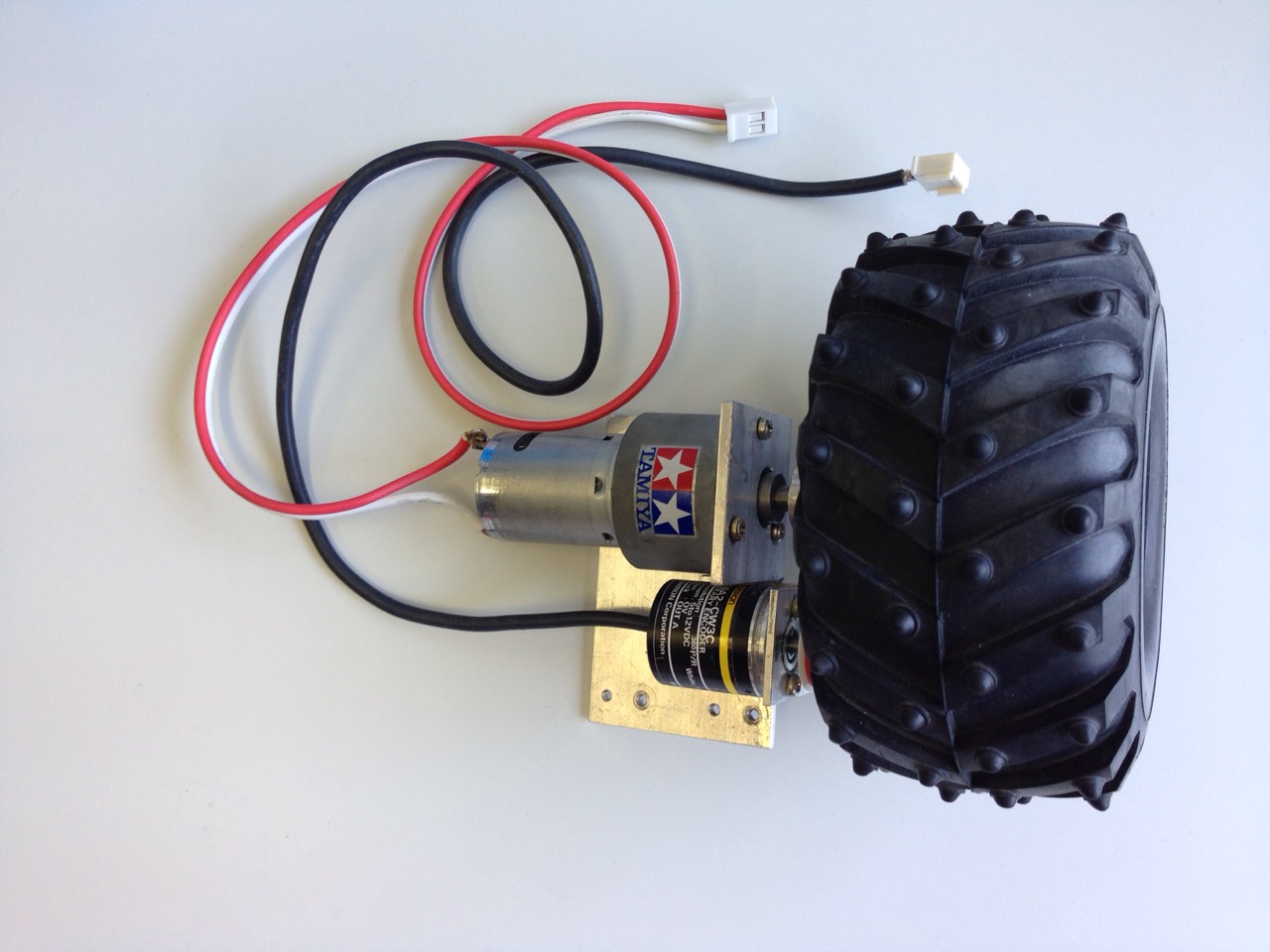
Fig.26 タイヤ等
- タイヤ、モーター、ロータリエンコーダは金具で取り付けられていた。
- モーター取り付け金具
- ロータリーエンコーダ取り付け金具
ボールキャスターの取り外し

Fig.27 ボールキャスター
- ボールキャスター(参考: MIRSMG3D 部品表-ボールキャスター-下段シャーシ )はFig.5のように下段シャーシの裏に取り付けられていた。
- ボールキャスターはMIRSMG3D標準機と同様のものであった。
- ボールキャスターを用いることで重心が片寄らないで安定した走行ができたと考えられる。
下段シャーシの取り外し
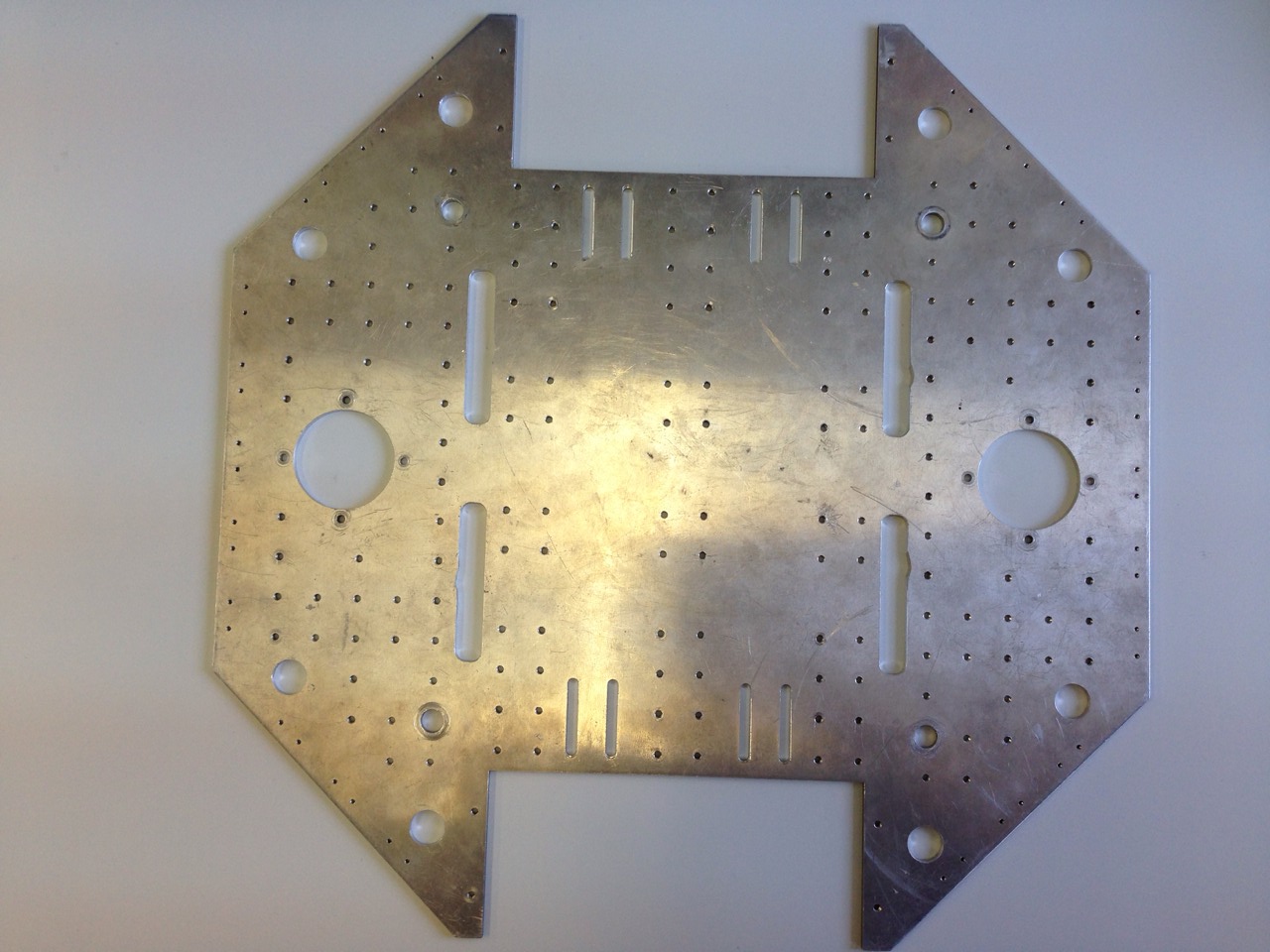
Fig.28 下段シャーシ
- 下段シャーシ はMIRSMG3D標準機に採用されていたものであった。
- 下段シャーシのみを金属にすることにより機体の重心の位置を標準機より低く保ち安定した走行を期待(参考: MIRS1201 システム提案書 )したものと思われる。
その他の部品
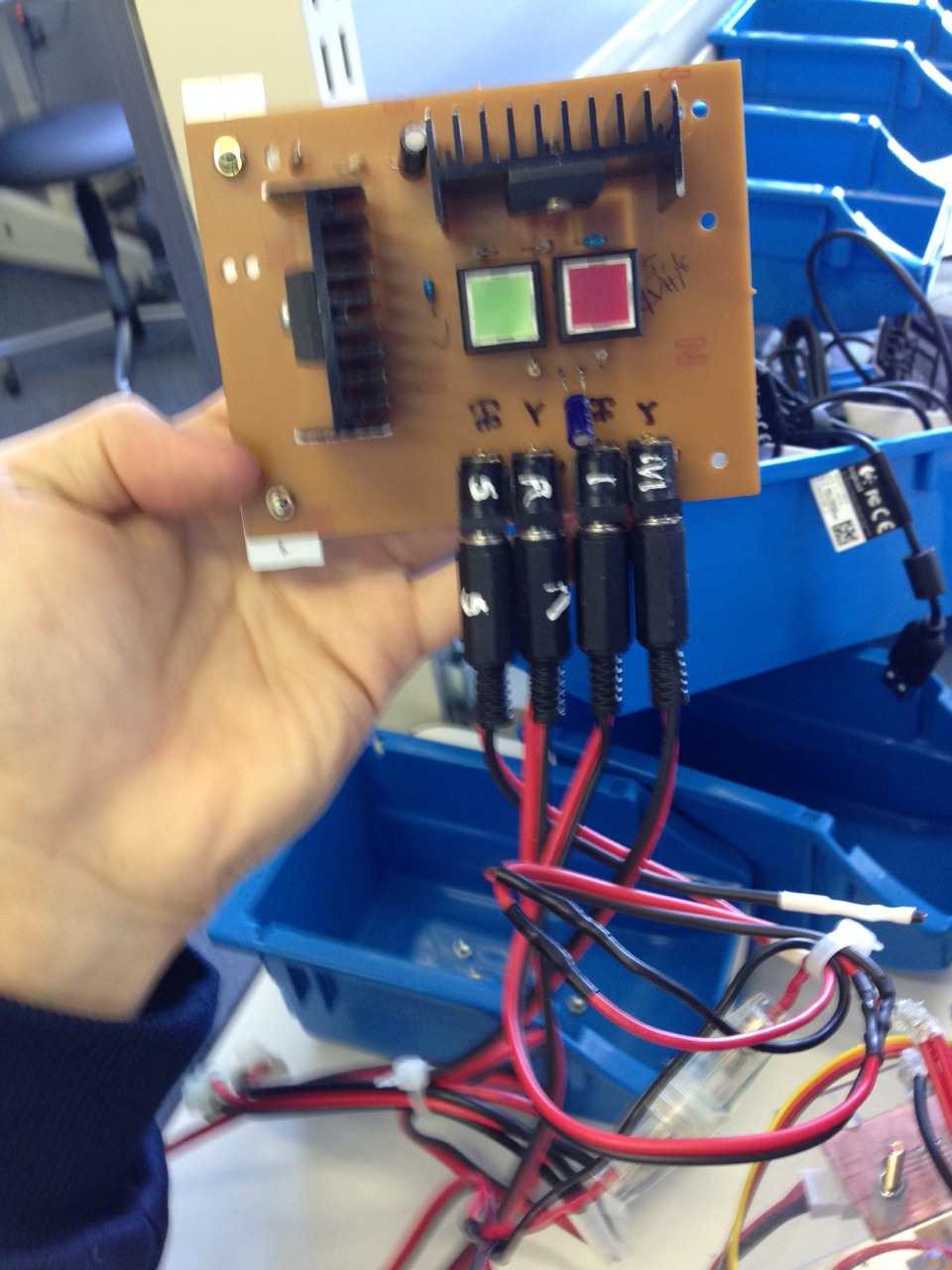
Fig.29 電源ボード
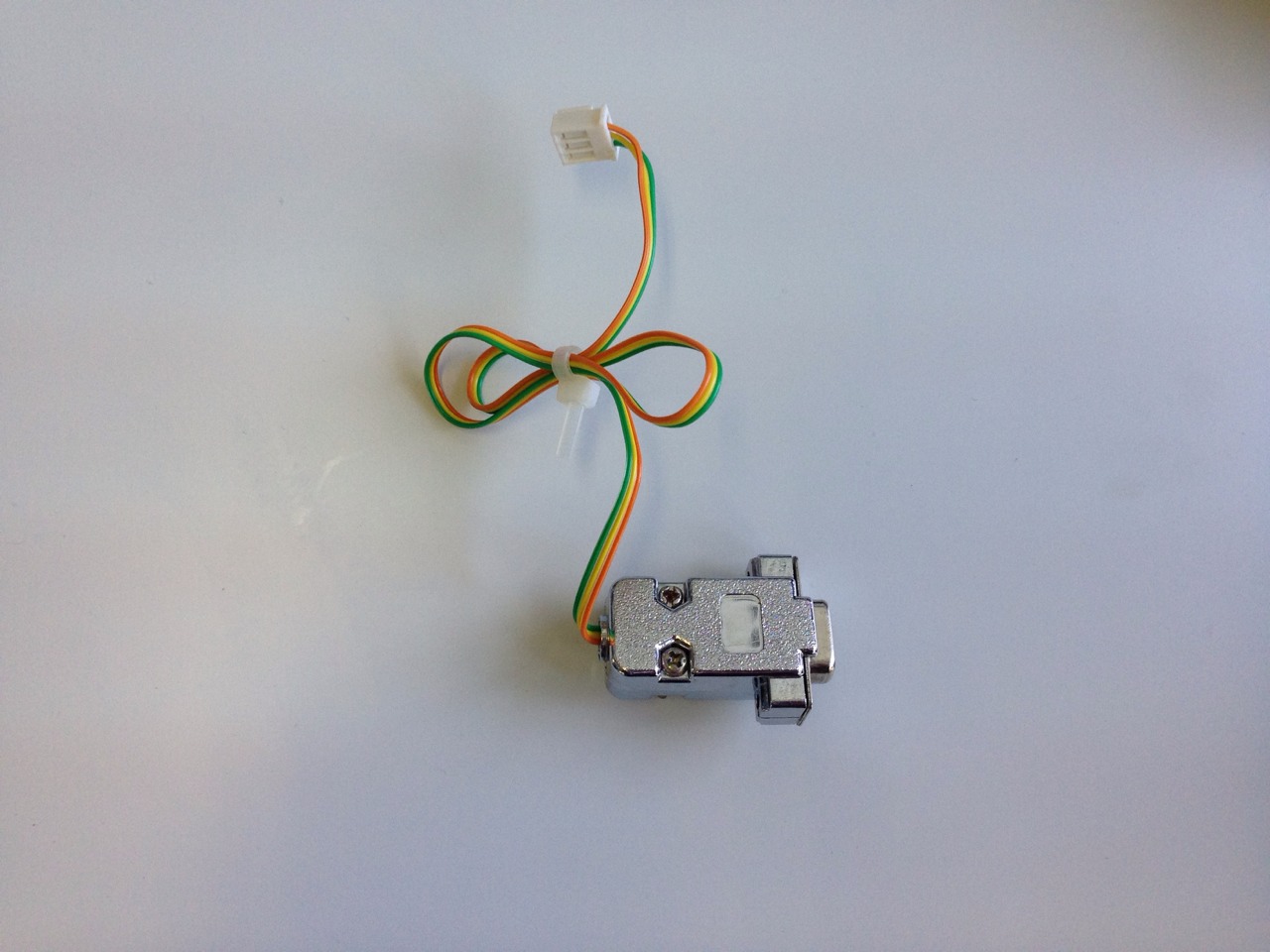
Fig.30 シリアル通信用ケーブル
- Fig.29の電源ボード はMIRS1302の機体の外のケーブルに接続され機体の中自体には入っていなかった。
- 電源ボードの4つのコネクタがDCジャックの変更されている以外は標準部品そのものであった
- Fig.30のシリアル通信用ケーブル は上段シャーシ・後方部に取り付けてあった。
全部品
MIRS1302を解体した全部品と標準機製作のために追加した部品をまとめた写真をFig.31、Fig.32に示す。

Fig.31 全部品(左)
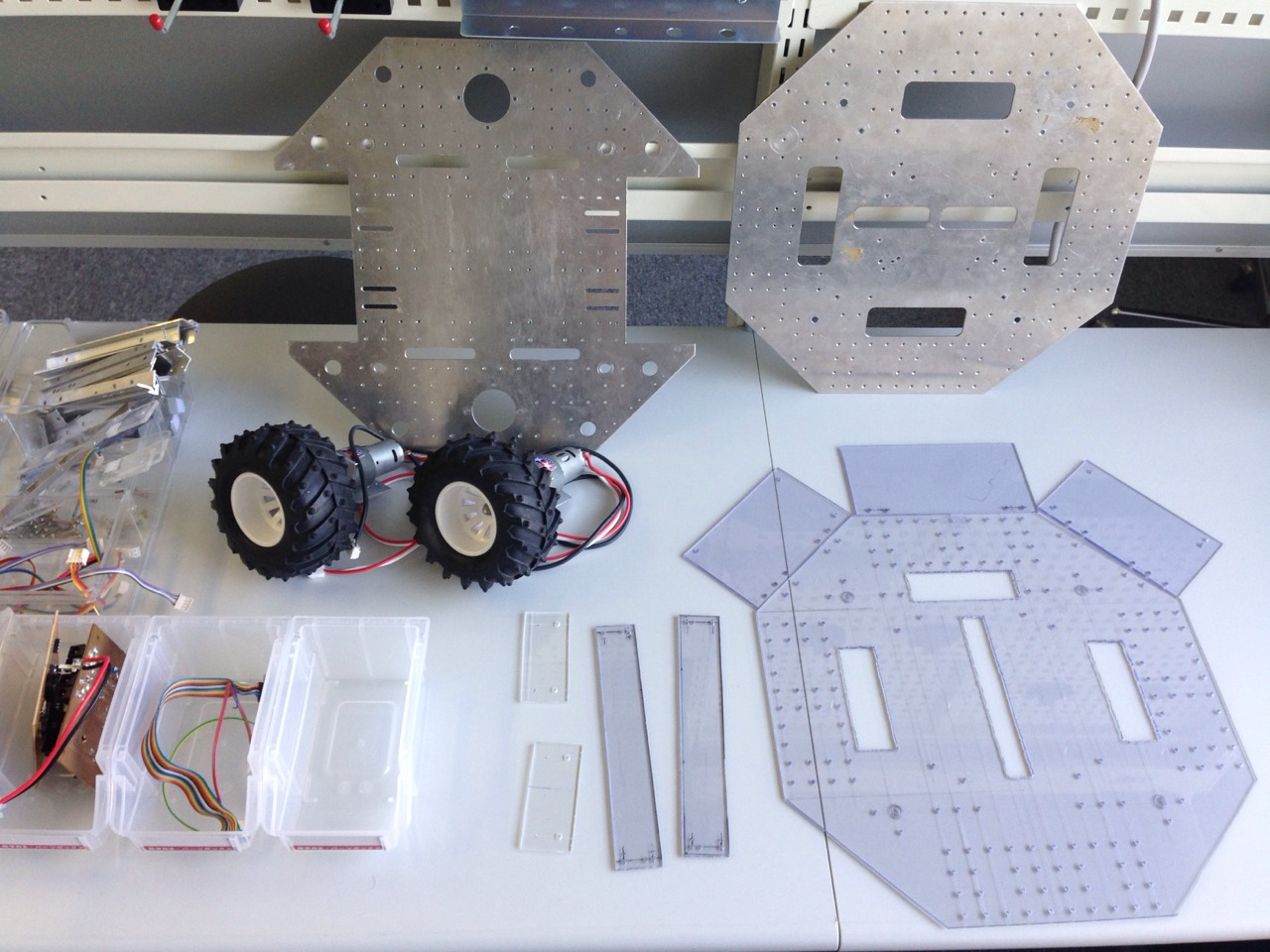
Fig.32 全部品(右)
まとめ
MIRS1302が標準機と違う点を表1に示す。
| 箇所 | 内容 |
|---|---|
| カメラ | 1台から5台に変更し視野を広く。 |
| パフォーマンス用ボード | 機体の状態を把握するLED装飾の実装のため。 |
| ドータボード | 2枚から1枚に変更。MIRS1302のオリジナルシステムで使用したもの。 |
| 超音波センサ | 2個から4個の変更し安定した走行に。 |
| 上段シャーシ | 塩ビ板に変更することで軽量化&機体内部への視認性の向上。 |
| バンパ | 塩ビ板に変更することで軽量化&機体内部への視認性の向上。 |
| オリジナル金具 | 部品の配置を自分たちの好みに設計していた。 |
| USBハブ | カメラを複数台使えるようにした。 |
所感
- 加藤
MIRS1302の機体はカメラや超音波センサを増やしデータの採取にとても意欲的であった。
この機体をベースに開発を進められることはアドバンテージだと思うのでソフトで生かせるように頑張りたい。 - 石井
MIRS1302はパフォーマンス用ボードを作り、LED装飾を採用するなど、オリジナル性がとてもよかった。
僕らもオリジナルな部分をいろいろ追加していきたいと思った。 - 早川・萩原・海老名・高村
配線が複雑でわかりくかった。自分たちで製作に取り掛かる際には整理をしっかりしてわかりやすくしていきたい。
ネジが多く、とりにくいパーツもあったので、計画的に製作し、メンテナンス性が高い機体にしていきたい。
カメラがたくさんあっても実際に動作していないところもあったので、トラブルを回避して正常に動作するようにしたい。また、付属品が
たくさんあるので有効に活用していきたい。