MIRS1401 �Ǘ��䒠�֖߂�
| ���� |
MIRS1401 MIRS1304��̕� |
| �ԍ� |
MIRS1401-REPT-0001 |
�ŏI�X�V��:2014.5.14
| �Ő� |
�ŏI�X�V�� |
�쐬 |
���F |
�����L�� |
| A01 |
2014.5.14 |
����A����A���� |
|
���� |
| A02 |
2014.5.20 |
����A����A���� |
����搶 |
MIRS1304�̓����ɕ⑫�lj�
��̎菇�ɕ⑫�����lj�
�\�FMIRS1304�̉��ljӏ��ƖړI �lj� |
1.�͂��߂�
�{�h�L�������g�́A
MIRS1304�̉�̕��ł���B
MIRS1304�̑g�ݗ��Ď菇���ɉ����čs�����Ƃ������A������Ȃ������B
�����ŁA�u�W���̂��́v�Ƃ����̂�MIRSMG3D MG3�̕W�����i�̂��Ƃł���B
2.�S�̐}
♦MIRS1304�̓���
MIRS1304 �V�X�e����ď����J���̃R���Z�v�g�͌y�ʉ��ƃ����e�i���X���ł��邱�Ƃ�����������B
�O���������`�ł���W���@�Ɣ�ז�50���ƂقǏ��^������Ă����B
���`�̊O������ɂ����邾���ŁA�S�Ă̊�Ղ�������悤�ɂȂ��Ă��胁���e�i���X���̌��オ����Ă������A�z���͂����Ⴒ���Ⴕ�Ă������߂킩��ɂ��������B
MIRS1304�̃V���[�V�́A�R�[�X����X���[�Y�ɑ��s�����邽�߂ɁA���^�����A���x�����コ����悤�ɂ��Ă����B
♦�S��
 Fig2-1.�O�ʏ㕔
Fig2-1.�O�ʏ㕔
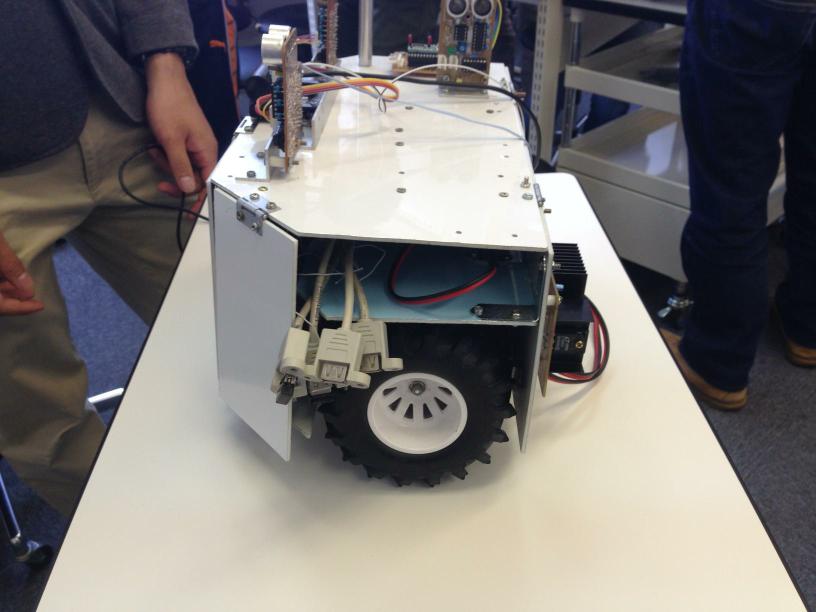 Fig2-2.����
Fig2-2.����
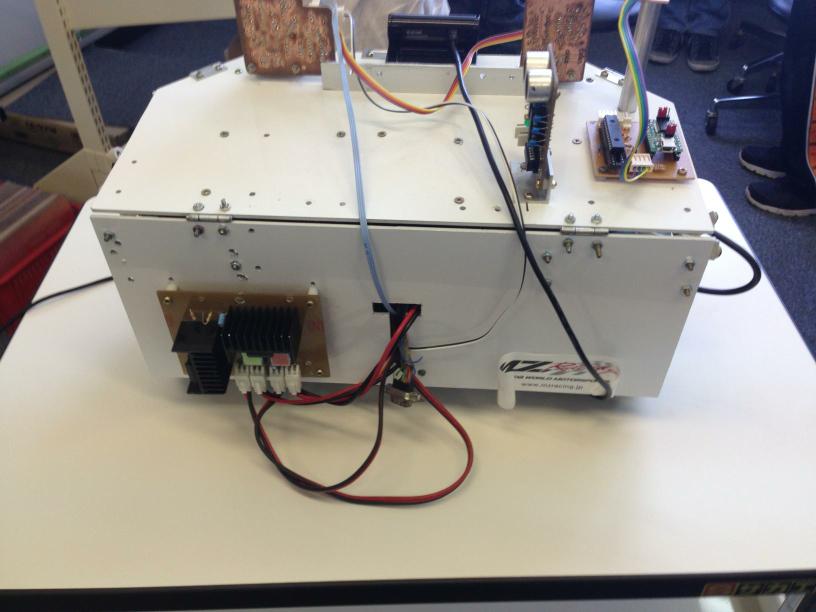 Fig2-3.���
Fig2-3.���
 Fig2-4.����
Fig2-4.����
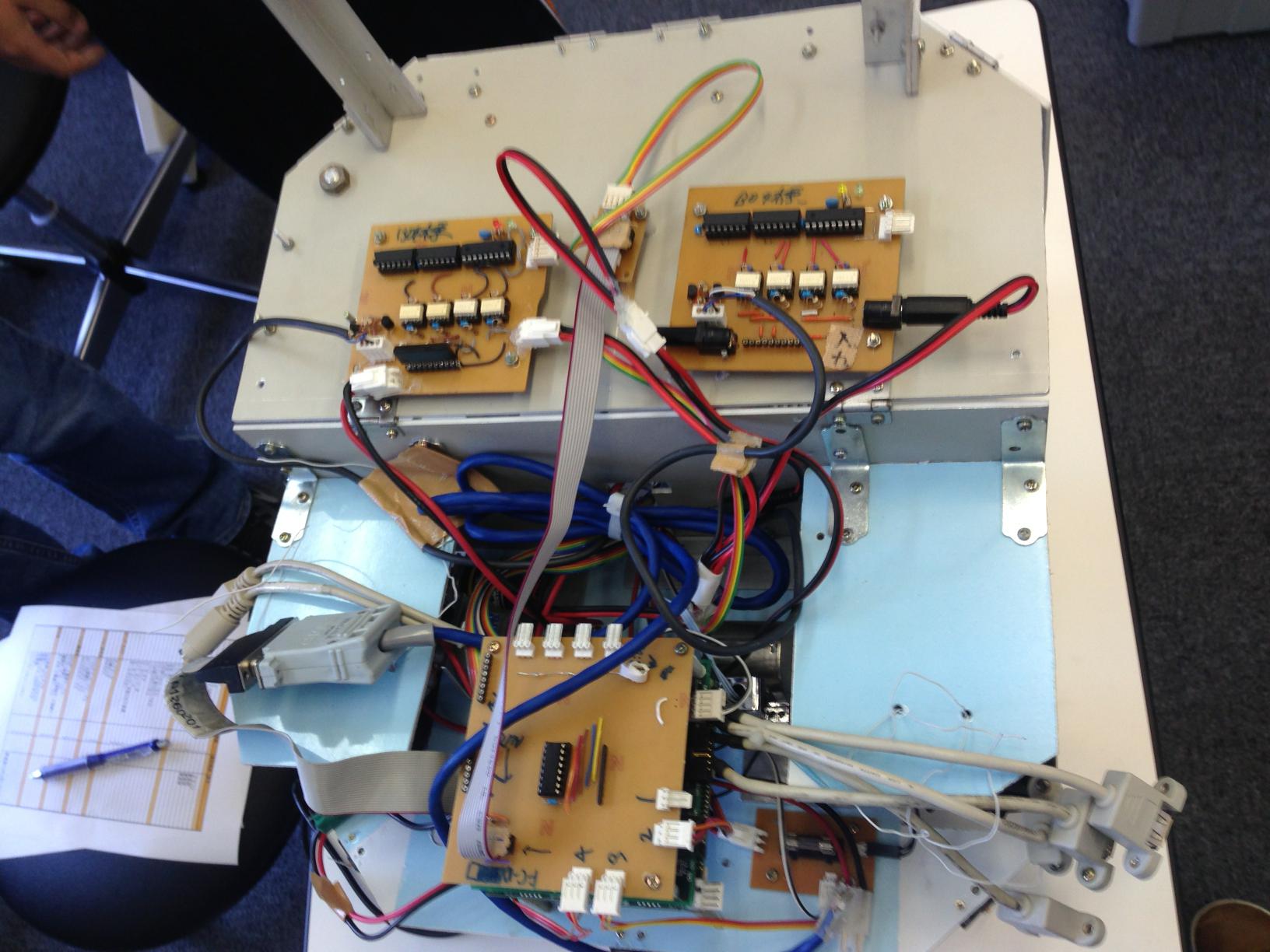 Fig2-5.�������
Fig2-5.�������
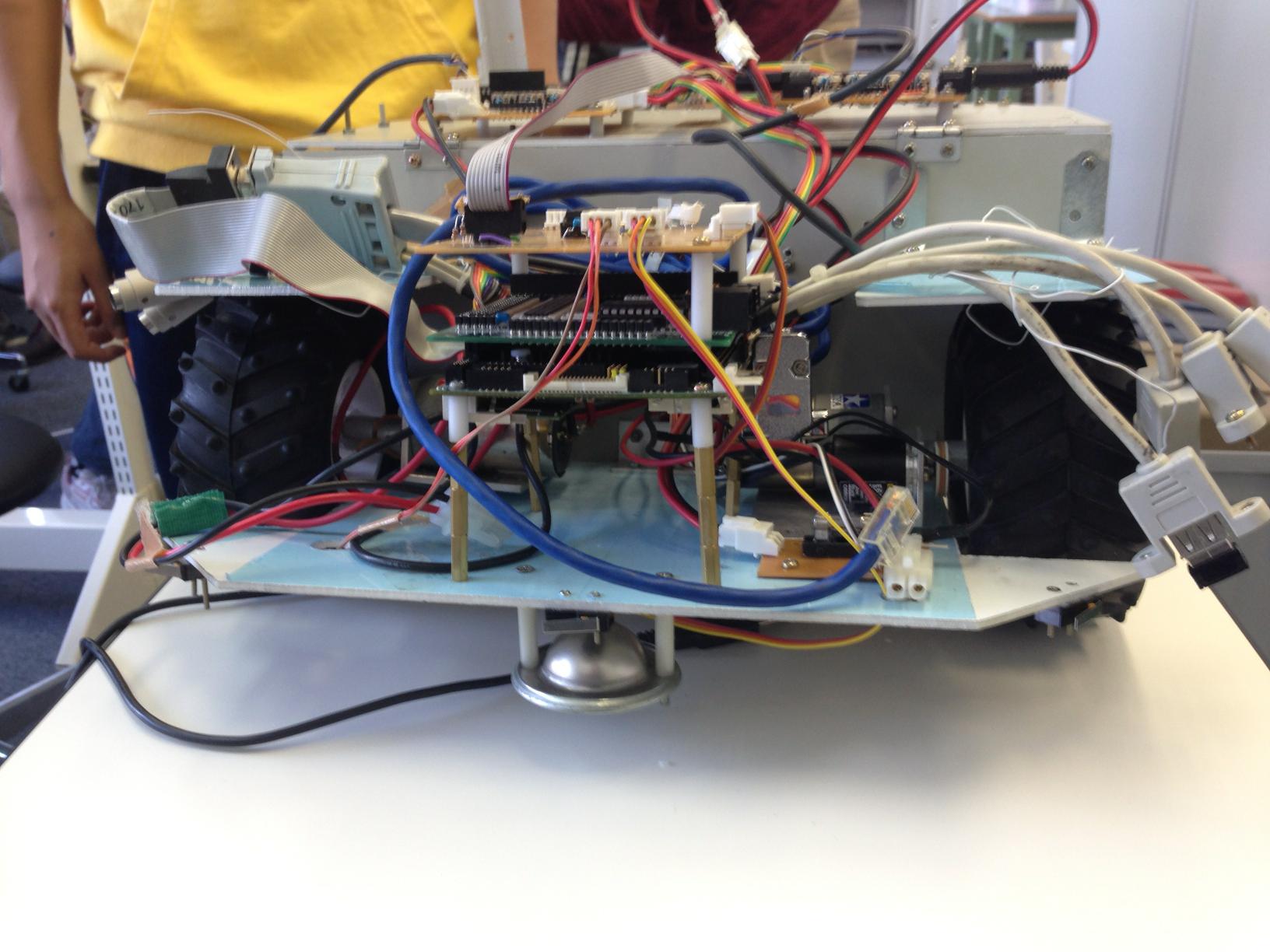 Fig2-6.�����O��
Fig2-6.�����O��
���̂悤�ɁA��Ղ͈�ڂŌ����悤�ɂȂ��Ă����B
3.��̎菇
3-1.�O�ʏ㕔�̉��
�㕔�Ɖ����͒���2�ŌŒ肳��Ă����B
�O�ʏ㕔�ɂ͒����g�Z���T3��ƃJ����1��ƃR���p�X�Z���T���ݒu����Ă����B
�����̎��O������s�����B
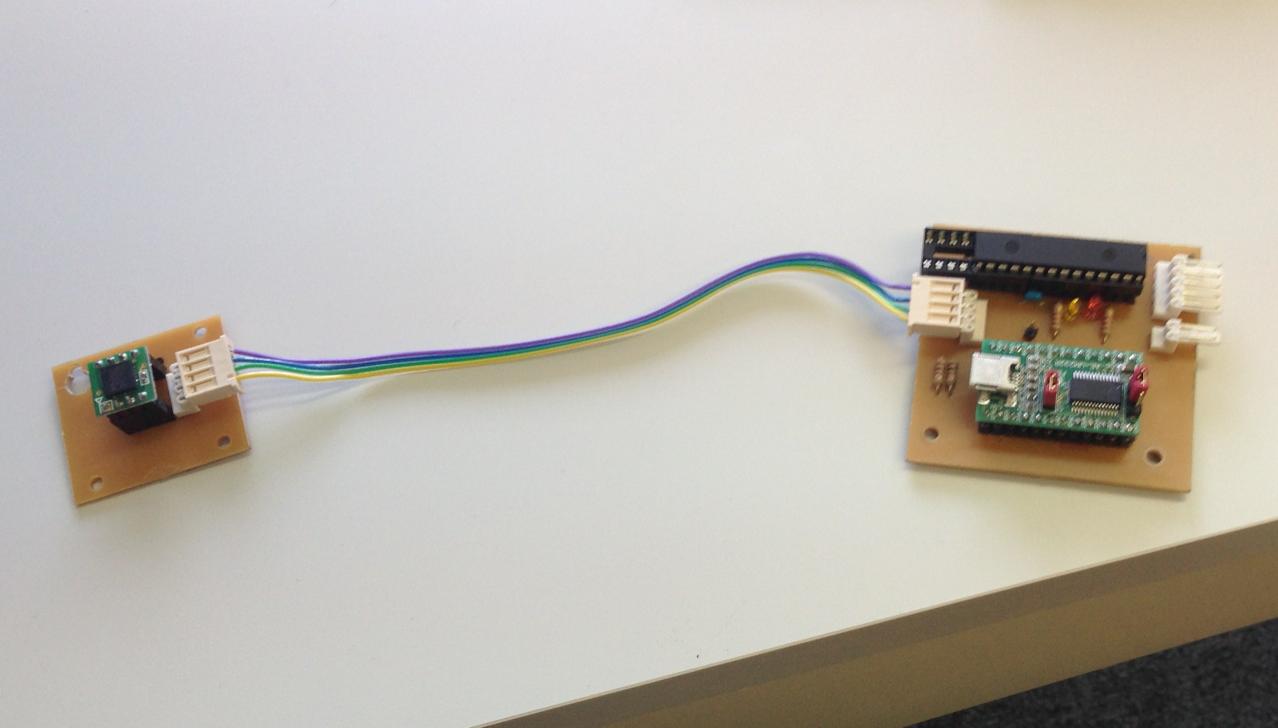
♦�O�ʏ㕔�ɐݒu����Ă��{�[�h��Z���T�E���W���[���̏ڍ�
 Fig3-1-3.�����g�Z���T��
Fig3-1-3.�����g�Z���T��
MIRS�̌���ɂ��Ă��������g�Z���T�ŁA�W���@��
�q�@�ł���B
L���`�̋���ŌŒ肳��Ă����B
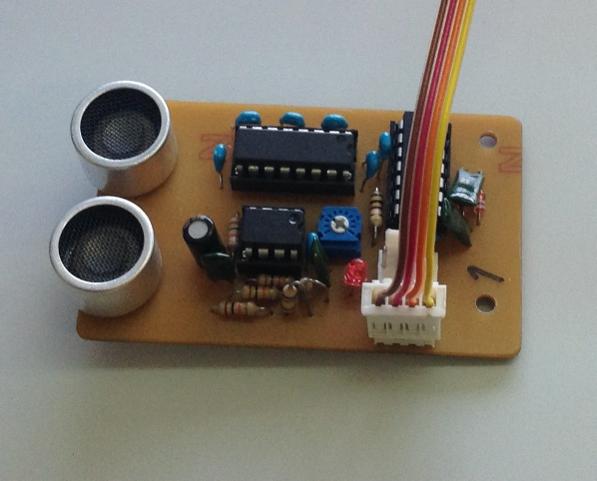 Fig3-1-4.�����g�Z���T�E
Fig3-1-4.�����g�Z���T�E
MIRS�̉E���ɂ��Ă��������g�Z���T�ŁA�W���@��
�q�@�ł���B
L���`�̋���ŌŒ肳��Ă����B
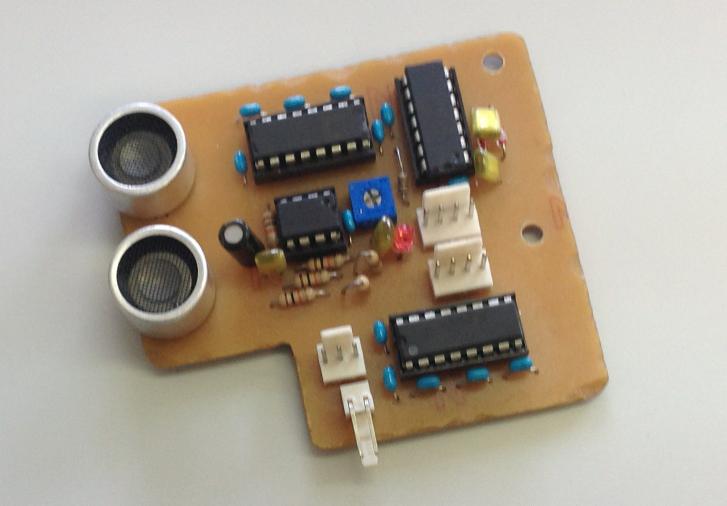 Fig3-1-5.�����g�Z���T��
Fig3-1-5.�����g�Z���T��
MIRS�̍����ɂ��Ă��������g�Z���T�ŁA�W���@��
�e�@�ł���B
L���`�̋���ŌŒ肳��Ă����B
 Fig3-1-6.Web�J�����iUCAM-DLE300T�j
Fig3-1-6.Web�J�����iUCAM-DLE300T�j
ELECOM�̃J�����B�����̖_�Ɏ����̂悤�Ȃ��̂ŌŒ肳��Ă����B
�V�X�e����{�v���ɂ��ƁA�𑜓x���悭���邱�ƂŔF���Ώۂm�ɂ��邽�߂ɕW���̂��̂Ƃ͈Ⴄ���̂��g�p���Ă���B
�ȏ�̃p�[�c�y�уZ���T�����O����A�@�̐��ʂƑ��ʂ̃V���[�V����̂����B
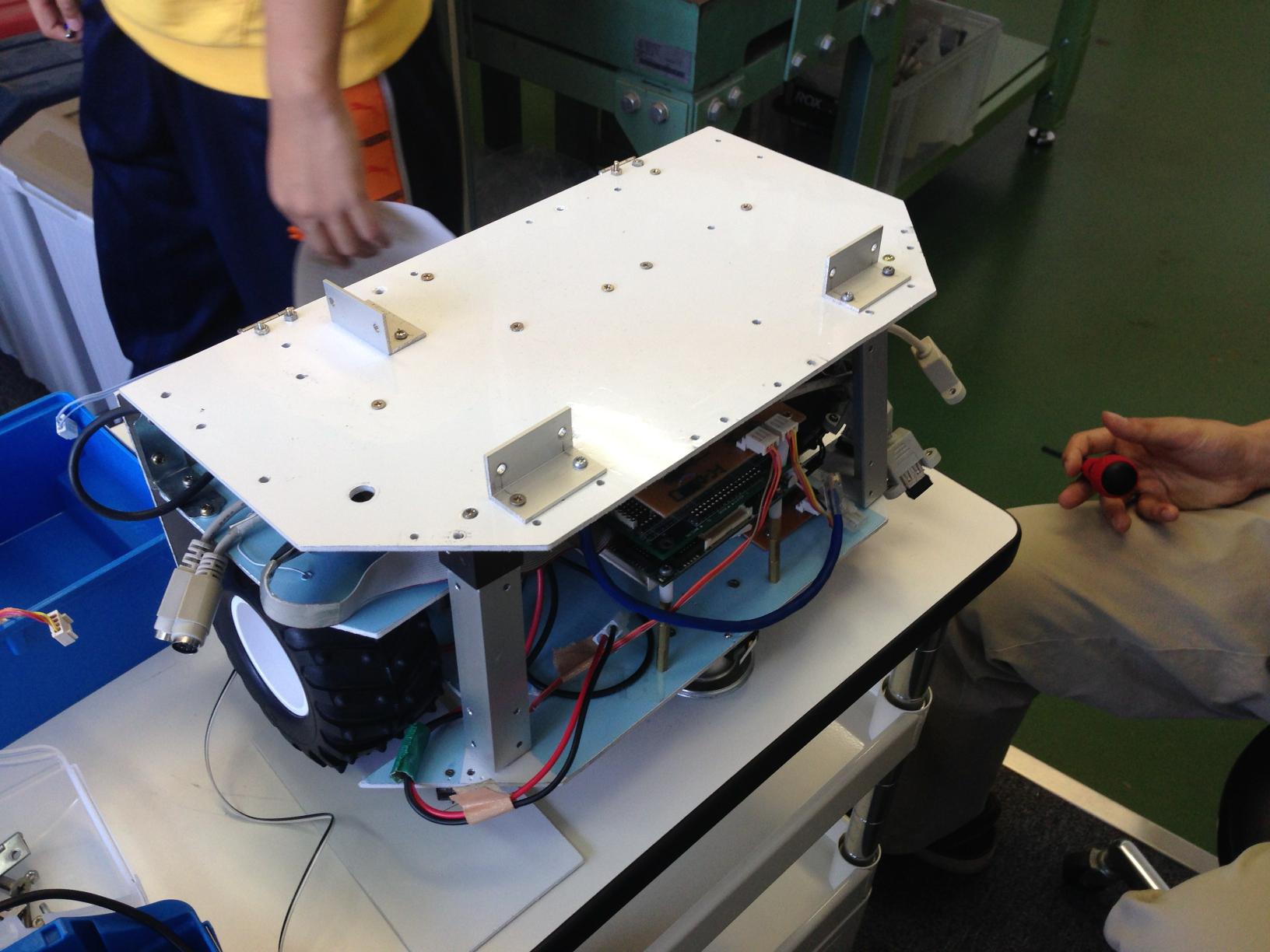 Fig3-1-7.�O�ʏ㕔��̌�
Fig3-1-7.�O�ʏ㕔��̌�
3-2.�㕔�V���[�V�̗��ʂ̉��
Fig3-1-7�Ɏʂ��Ă���㕔�V���[�V�̗��ʂ̉�̂��s�����B
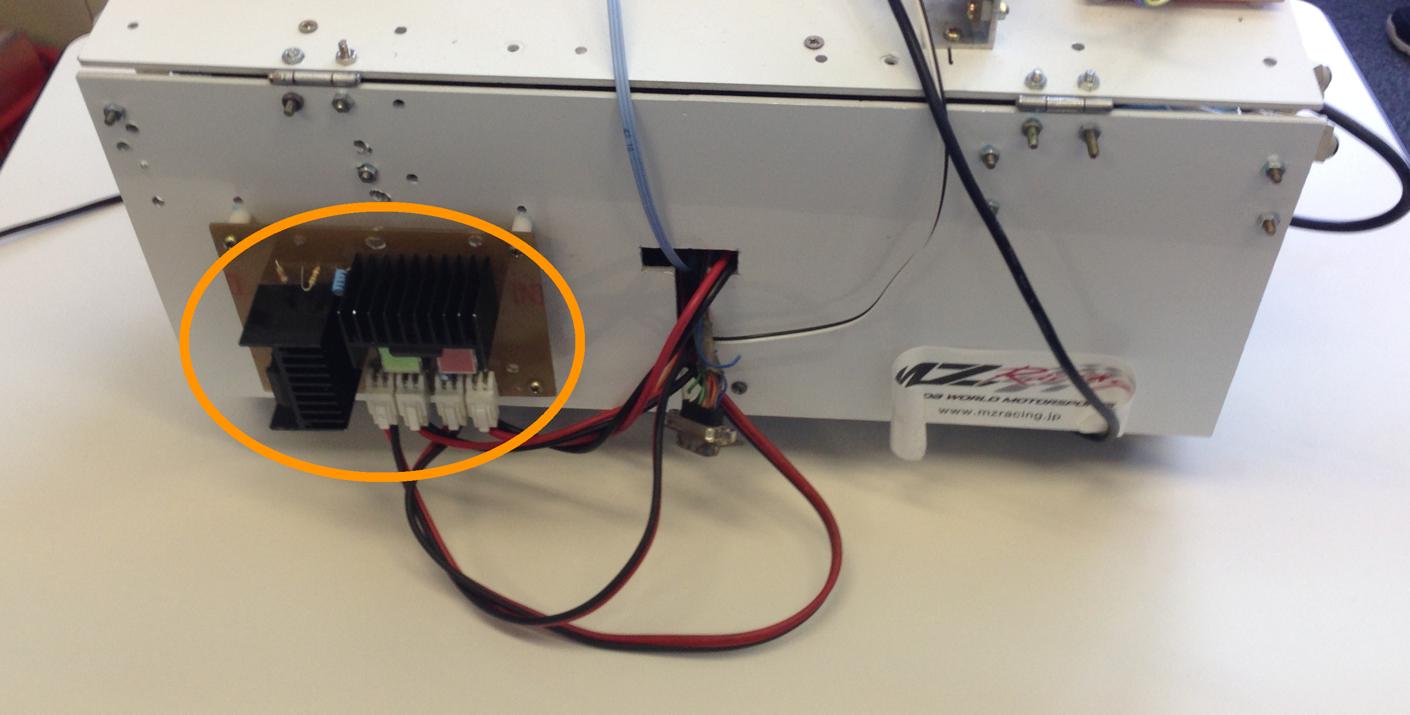
�V���[�V���ʂɂ̓��[�^�{�[�h��2�Ɣz���R�l�N�^�̒��p����ݒu����Ă����B
♦�㕔�ɃV���[�V���ʂɐݒu����Ă��{�[�h��Z���T�E���W���[���̏ڍ�
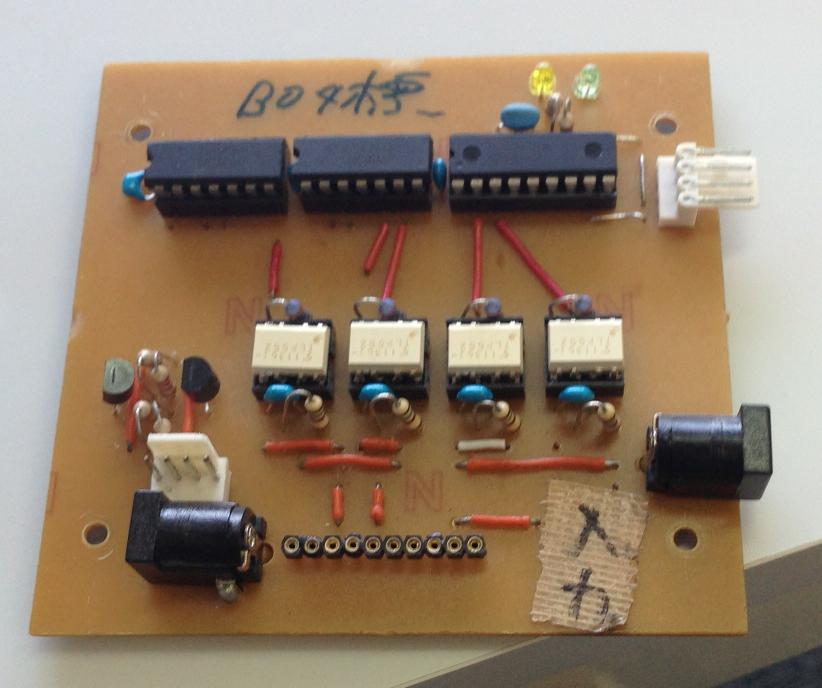 Fig3-2-3.���[�^����{�[�hB
Fig3-2-3.���[�^����{�[�hB
��ɓ����B�������A�R�l�N�^���ꕔDC�R�l�N�^�ɕύX����Ă����B
���̕ύX��
MIRSMG3D ���[�^����{�[�h���ǃv���W�F�N�g�ɂ����ǂł���ƍl�����B�܂��AMIES1304�ǂ�MIRS1205��̂̎��_�ŕЕ��̃��[�^����{�[�h�̃R�l�N�^��DC�W���b�N�ɕύX����Ă����B�܂�����ȏ�k���Ă��Е��݂̂̃R�l�N�^�ύX�̋L�q���݂���Ȃ������̂ŁA�R�l�N�^�ύX�̐^�ӂ͂킩��Ȃ��B
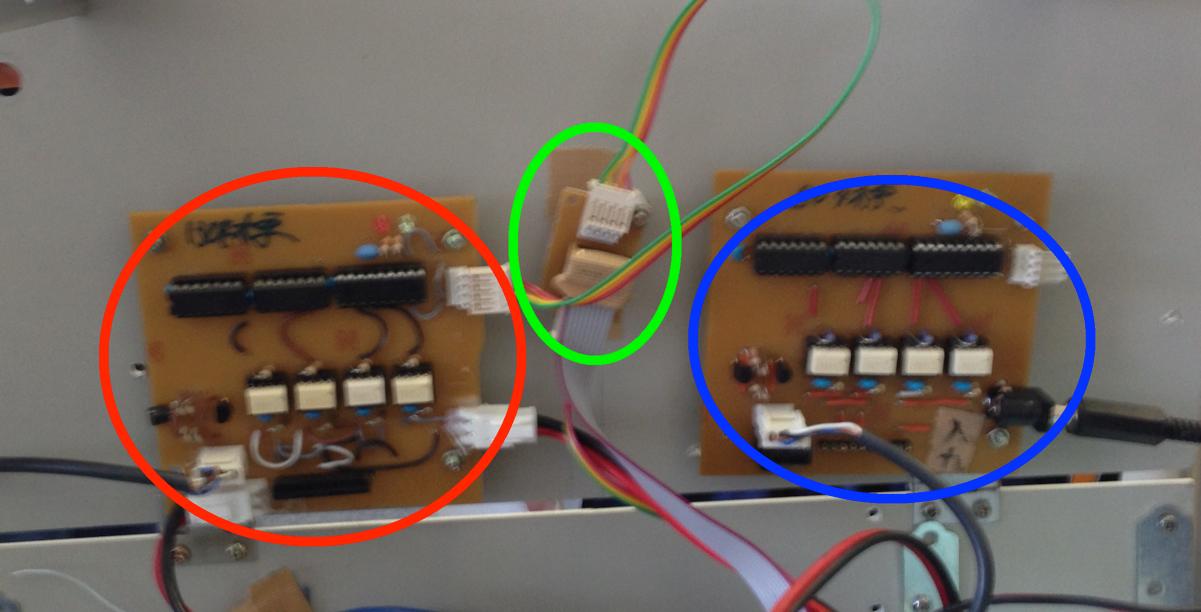
3-3.�@�̓������i�̉��
�@�̓������i�ɂ̓{�[�h���R������
 Fig3-3-1.�@�̓������i
Fig3-3-1.�@�̓������i
���F�h�[�^�{�[�h
���FFPGA�{�[�h
�� : CPU�{�[�h
♦�@�̓������i�ɐݒu����Ă��{�[�h��Z���T�E���W���[���̏ڍ�
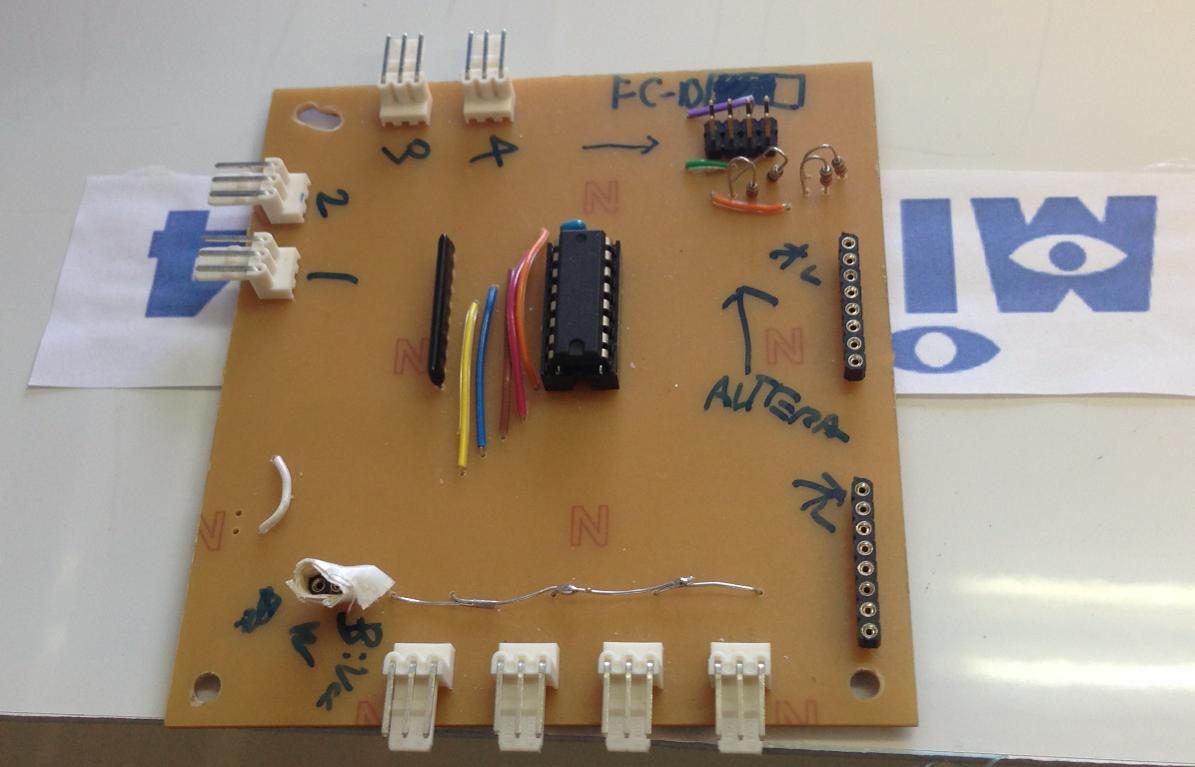 Fig3-3-2.�h�[�^�{�[�h
Fig3-3-2.�h�[�^�{�[�h
�W���̂��̂ƈ�����B
�G���N�g���j�N�X�ڍאv���ɂ���MIRS1101,MIRS1104,MIRS1105�̃I���W�i���h�[�^�{�[�h���Q�l��1���ɂ���Ă���B
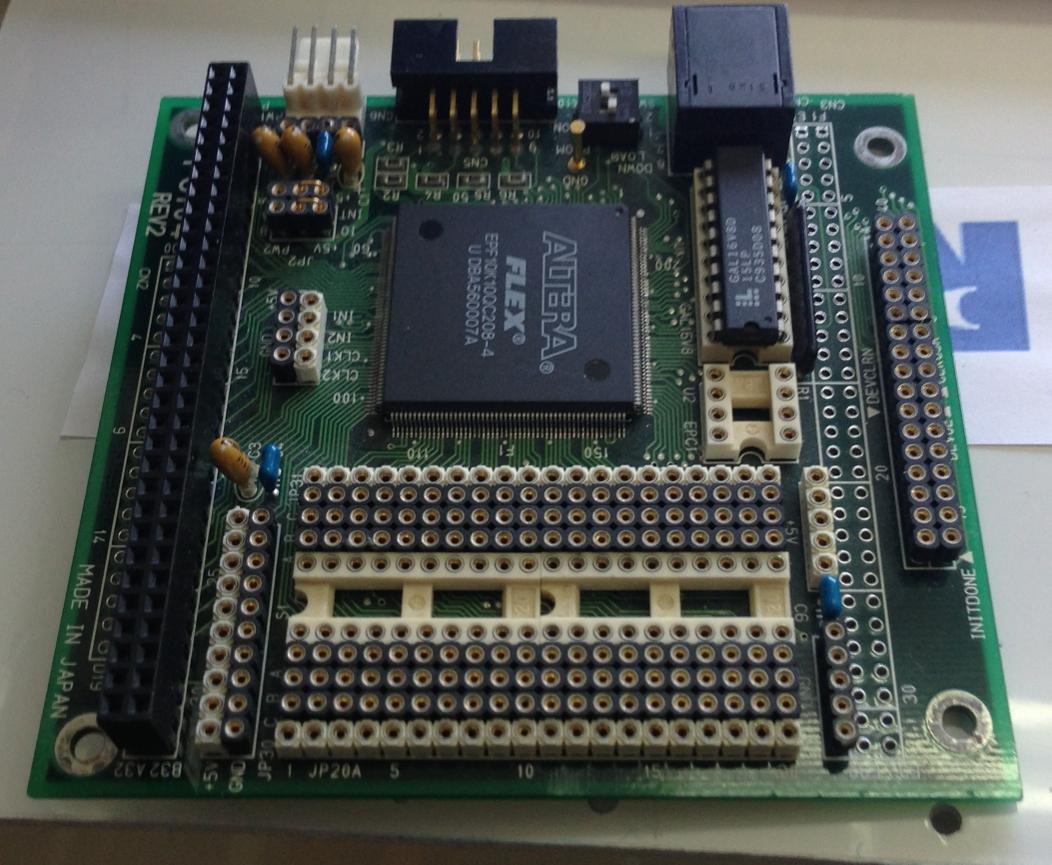 Fig3-3-3.FPGA�{�[�h
Fig3-3-3.FPGA�{�[�h
�W����FPGA�{�[�h�ł���B
�Ȃ��A
MIRSMG3S�̊J���ɔ������܂܂ł�FLEX10K:EPF10K10����
MS104-FPGA/C�V�ւƕύX�����B
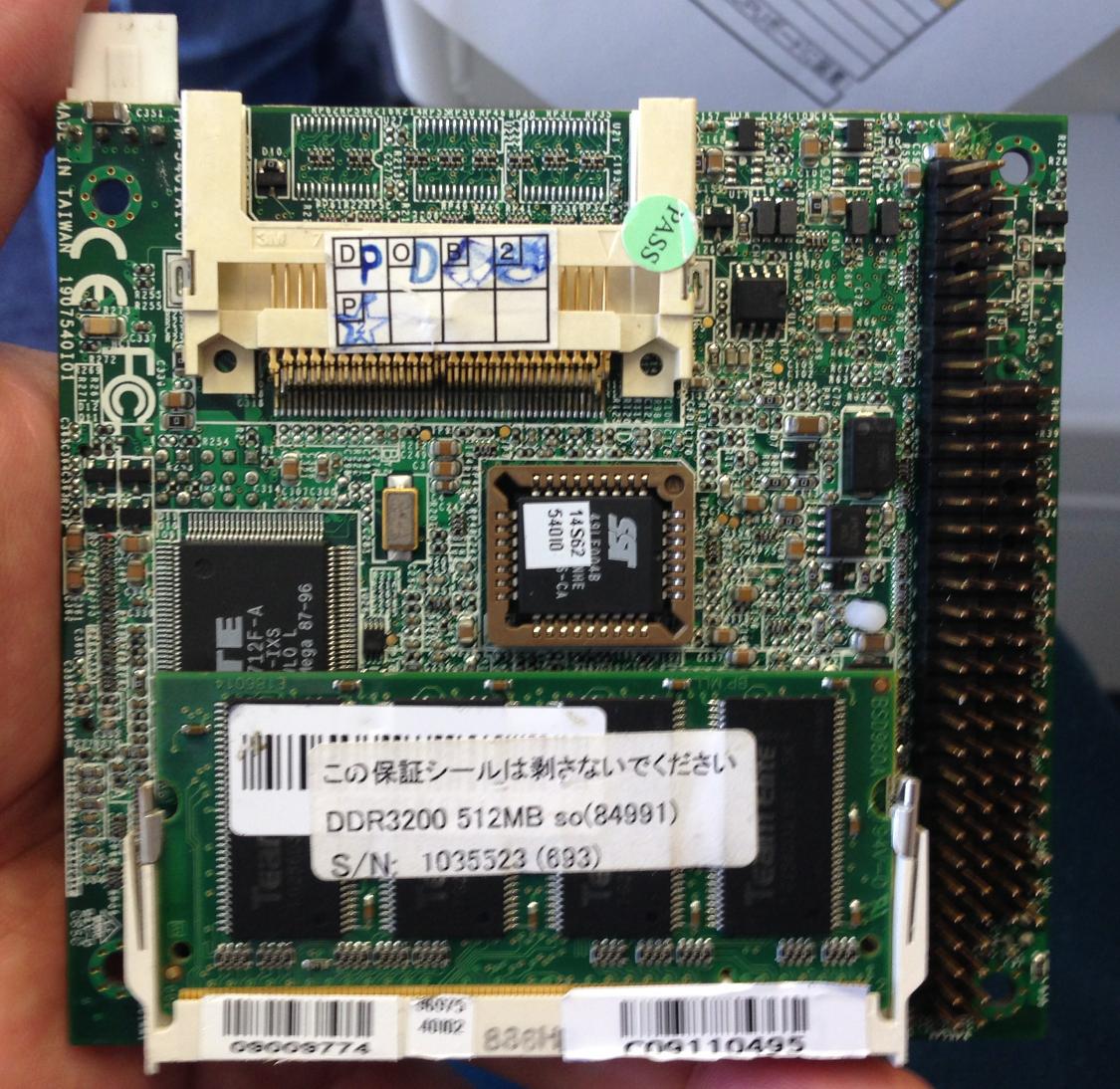 Fig3-3-4.CPU�{�[�h
Fig3-3-4.CPU�{�[�h
�W����CPU�{�[�h�ł���B
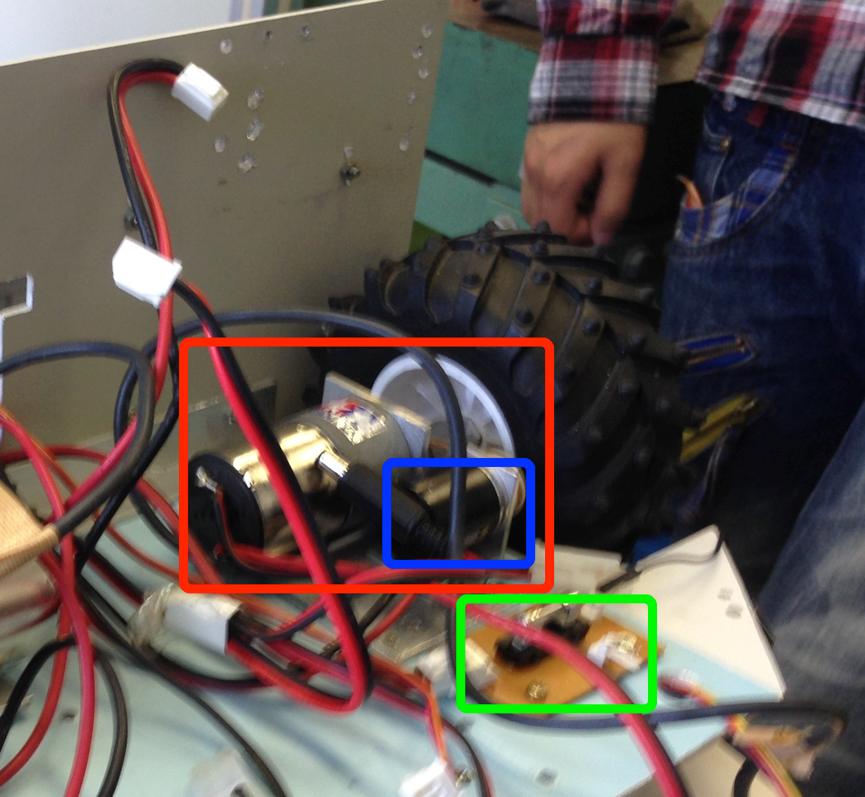
3-4.�@�̊O�ʌ㕔�Ɠ��ʉ����̉��
��L�̍�ƌ�AFig3-4-1�̂悤�ɂȂ����̂ŃP�[�u���ƃz�C�[�������O���c��̉�̂��s�����B
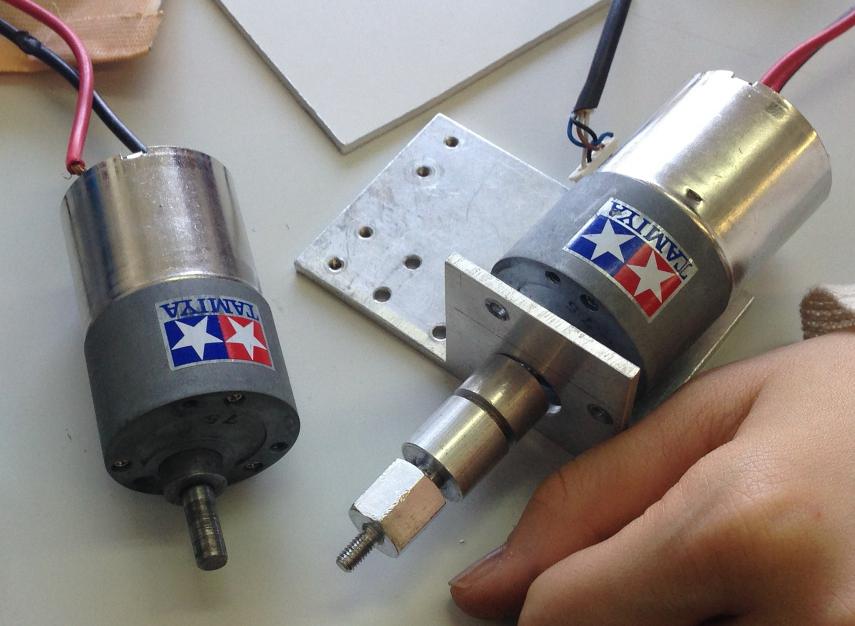
���ʉ����ɂ̓��[�^�[�ƃ��[�^���G���R�[�_�����ꂼ��2��ƃq���[�Y��1��
�O����ʂɂ͓d���{�[�h���ݒu����Ă����B
♦�@�̓�����i�A�@�̊O����ʂɐݒu����Ă��{�[�h��Z���T�E���W���[���̏ڍ�
 Fig3-4-5.�q���[�Y
Fig3-4-5.�q���[�Y
�d���P�[�u���̂����q���[�Y�����[����P�[�X�t���̃P�[�u�����j�����A�C���ł��Ȃ����߁A�V�K�̃P�[�X��p�ӂ�Fig3-4-5�̂悤�Ɋ�ՂɎ��t�����A��
MIRS1303������Ă����̂ŁAMIRS1304�ǂ��������R�Ńq���[�Y�����̂悤�Ɏ��t�����Ǝv����B
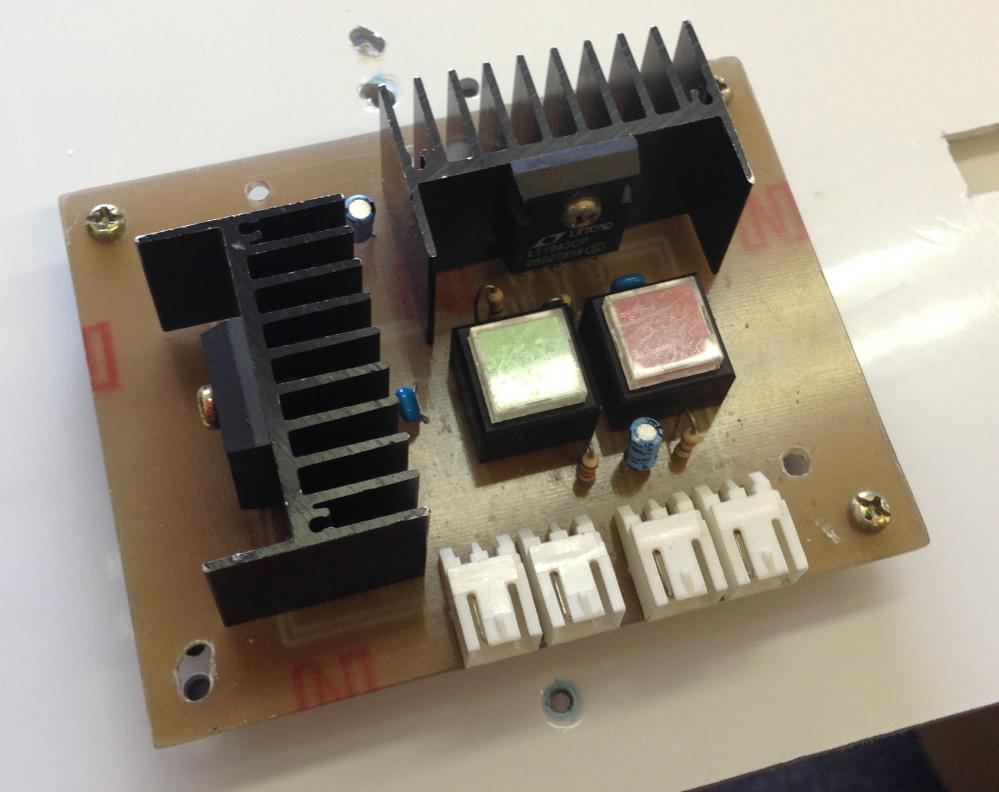 Fig3-4-6.�d���{�[�h
Fig3-4-6.�d���{�[�h
�W���̂��̂ł������B
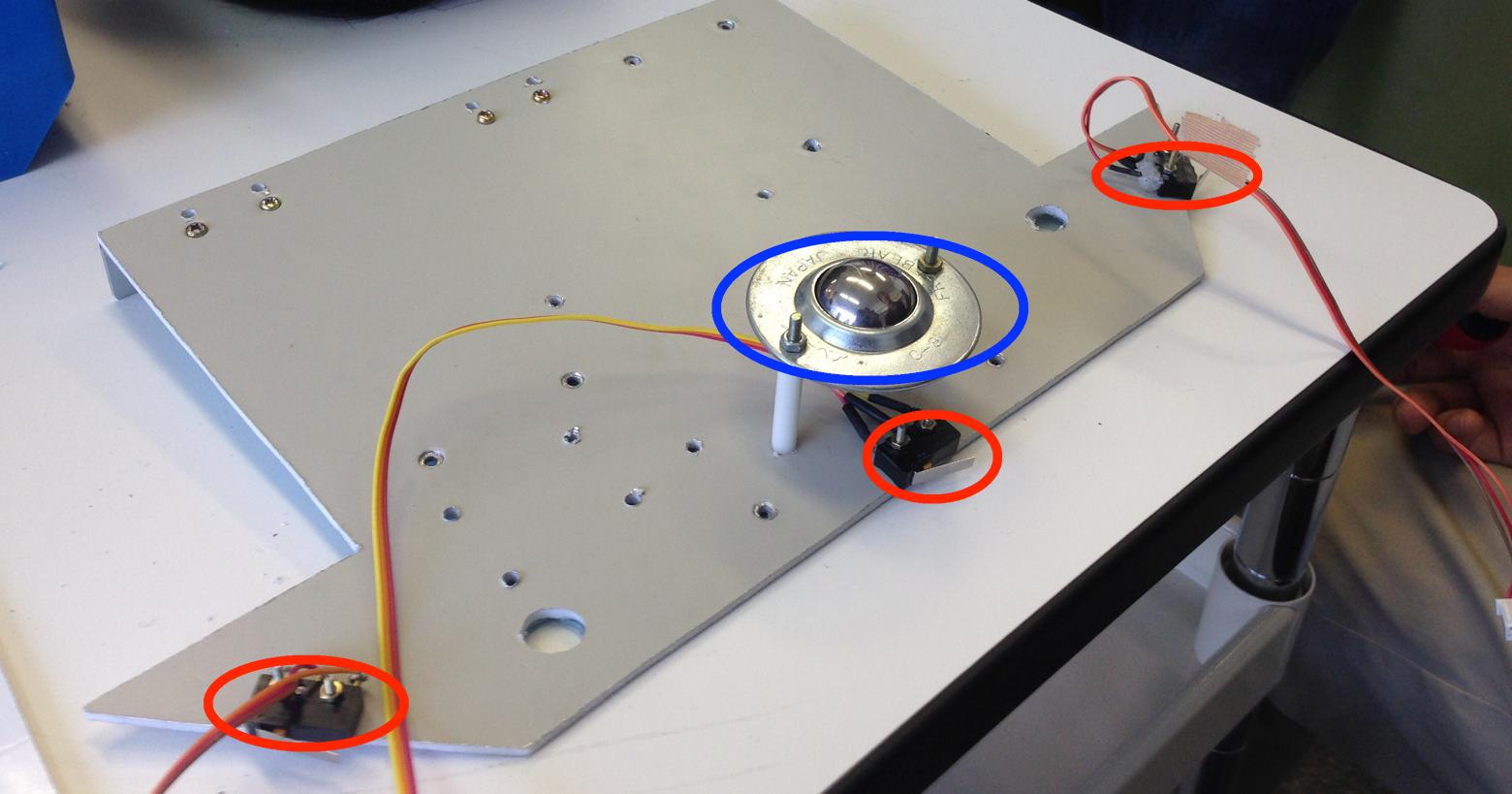
3-5.�@�̊O�ʉ����̉��
�@�̊O�ʉ����ɂ̓^�b�`�Z���T�ƃ{�[���L���X�^�[���ݒu����Ă����B
♦�@�̊O�ʉ����ɐݒu����Ă��{�[�h��Z���T�E���W���[���̏ڍ�
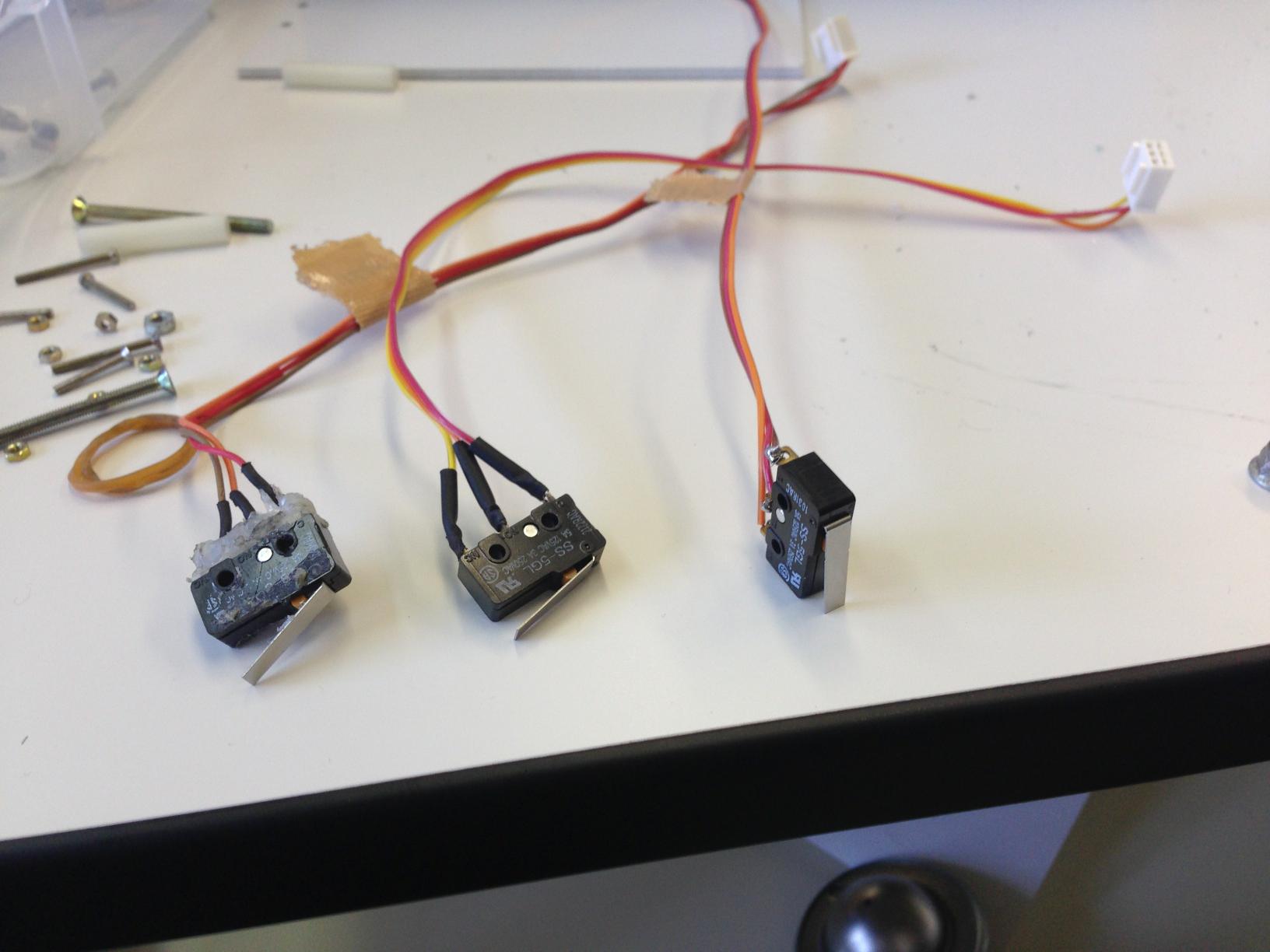 Fig3-5-2.�^�b�`�Z���T
Fig3-5-2.�^�b�`�Z���T
�W���̂��̂ł��������A���̓���1�ƃP�[�u�����z�b�g�{���h�łőe���������E�����ł����V���Ɏg�p����͕̂s�\�ł���B
 Fig3-5-3.�{�[���L���X�^�[
Fig3-5-3.�{�[���L���X�^�[
MIRS�̑O��������1�Œ肳��Ă����B
4.�S���i
�ȉ��ɑS���i�������B
 Fig4-1.�S���i�P
Fig4-1.�S���i�P
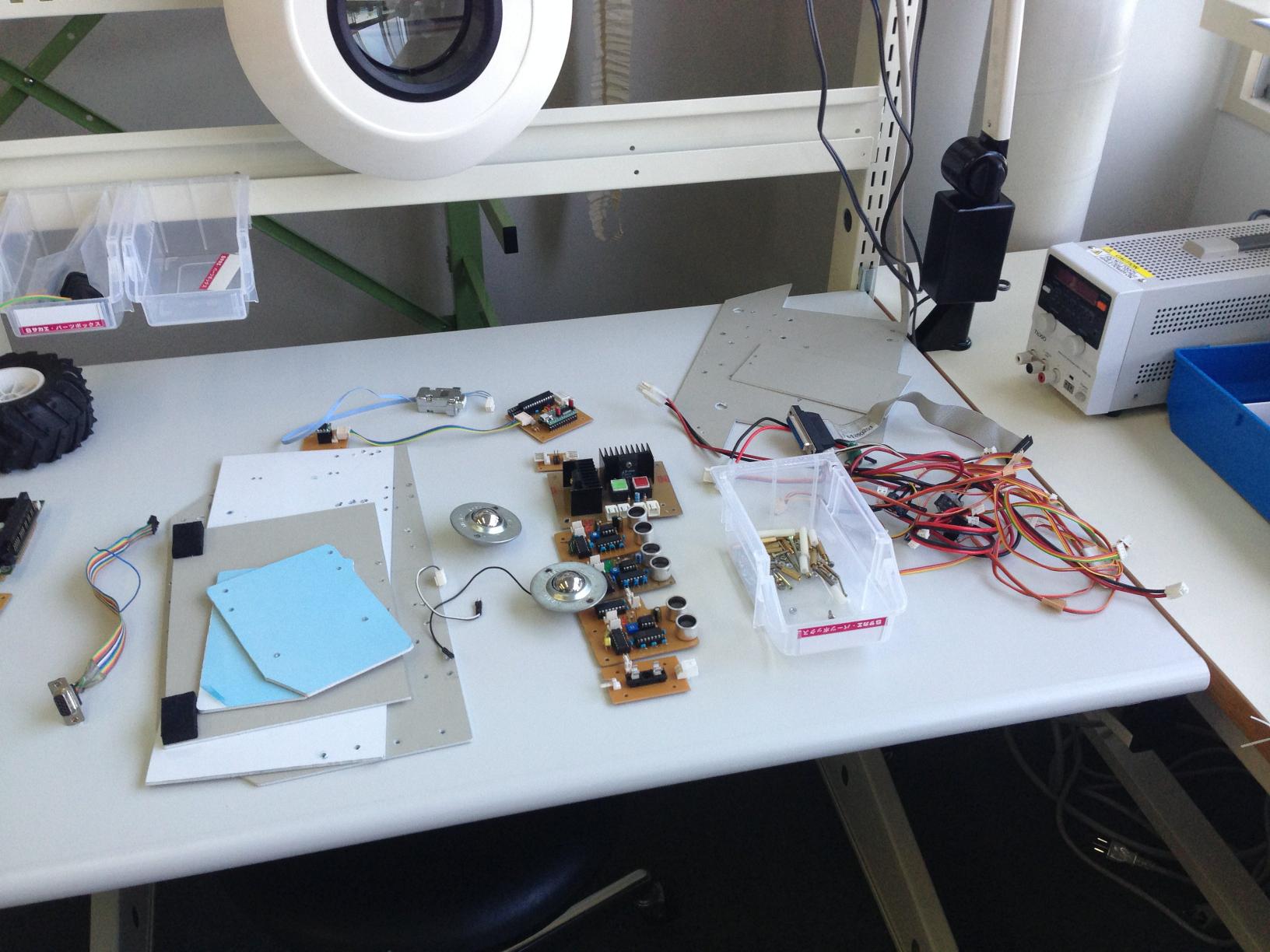 Fig4-2.�S���i�Q
Fig4-2.�S���i�Q
MIRS1304���W���@������ǂ����ӏ����܂Ƃ߂��\���ȉ��Ɏ����B
MIRS1304�̉��ljӏ��ƖړI
| ���ljӏ� | �ڍ� | �ړI |
| �R���p�X�Z���T |
������2�@���� |
�@�̂��ǂ��������Ă��邩�f���邽�� |
| �����g�Z���T�[ |
������2�@���� |
�������U�����ɍ��̕lj����ɐi�ނ��߁A
�璷�������߂đ��萸�x���� |
| ���[�^����{�[�h |
�ꖇ�̂݃R�l�N�^��DC�W���b�N�ɕύX |
�ڐG�s�ǂ�f���̖h�~ |
| �㉺�i�V���[�V,�o���p�[ |
�V�K�̂��̂��쐬�����50���قǏ��^������Ă����B |
���^�A�y�ʉ�
�����e�i���X���̌��� |
| �h�[�^�{�[�h |
�W���ł�2������1���ɂ܂Ƃ߂��Ă����B |
�ȃX�y�[�X���A�����e�i���X������ |
| Web�J���� |
�W���̂��̂łȂ�ELECOM�̃J�������ݒu����Ă��� |
�摜�F���̐��x����̈� |
6.����
MIRS1304�̓P�[�u�����܂Ƃ܂��Ă��Ȃ��킩��ɂ����������A��Ղ̊Ǘ��͂��₷�����ł������B���ׁ̈A�W���@�ƊO���͂��Ȃ�Ⴄ����͎̂�Ԏ�邱�Ƃ͂Ȃ������B�h�L�������g���݂Ă������ƈႤ��������������A�����ʐ^���Ȃ��Ă킩�肸�炭��̕��������̂Ɏ�Ԏ���Ă��܂����̂Ŏʐ^�𑽂߂ɎB��h�L�������g�̊Ǘ���O�ꂵ�Ă������Ǝv�����B��������A�����������@�̂��쐬����Ƃ��Ɍ��������Ƃ��ł��A�܂��A��y�����̂��߂ɂ��Ȃ�Ǝv���̂ŁA������₷���ׂ����Ƃ���܂Ō�������悤�Ƀh�L�������g���쐬���Ă��������B
���ÍH�ƍ������w�Z�@�d�q����H�w��