本プロジェクト(モータ制御ボード改良プロジェクト)は、MIRSが走行中に突然止まってしまう、直進走行が困難な場合があるといった 主にモータ制御周辺の問題点を洗い出し、解決することを目的に結成された短期プロジェクトである。
プロジェクトは2011年11月から2012年1月までの3か月間の短期間で進められ、以下のメンバーで行った。
| 学籍番号 | 氏名 | チーム | 担当 |
|---|---|---|---|
| d08106 | 梅原優太 | MIRS1101 | 配線改善 |
| d08120 | 志村英見 | MIRS1102 | C言語プログラム改善 |
| d08124 | 田代純也 | MIRS1103 | PICプログラム改善 |
| d08128 | 西村和真 | MIRS1104 | PICプログラム改善 |
| d08137 | 安田昇平 | MIRS1105 | 配線改善 |
| d07134 | 馬飼野祐貴 | 卒業研究にてMIRS改良担当 | 統括 |
- I/O Error が出てしまう
- MIRS走行中にモータの回転が急に停止、あるいは回転し続ける現象が起こる場合がある。
- このようなケースではコマンドプロンプト上にI/O Errorのメッセージが表示されている。
- Motor_restart()関数を実行することで(FPGAにTTFファイルを再ダウンロード改善が見られるが、Motor_restart()だけでは改善しない場合もある
- また、片方のモータにI/Oエラーが出ると両方エラーになってしまうが、どちらのモータが先にダメになるのかは決まっていない
- Error No.5 が出てしまう
- 前述のI/O Error同様、MIRS走行中にモータの回転が急に停止、あるいは回転し続ける現象が起こった際にコマンドプロンプト上にError No.5が表示されることがある。現象としてはI/O Errorと同じ。
- MIRSを宙に浮かせ、タイヤと地面が設置しない状況で回転させてもエラーは発生する
- 滑らかな走行ができない
- モータとモータ制御ボード、エンコーダの不具合からか、前進処理を実行中にモータがカクカクの動きをし、小刻みの直進を続けることがある
- 一度発生したからといって常に発生するわけでもなく、直ったと思ったら突然発生することもある。原因が不明。
- エンコーダのカウントが更新されない
- Motor_test()を実行した際、モータが回転するとそれに連動してロータリエンコーダが回転、回転数がカウントアップされていくが、モータが回っているにも関わらずカウントが更新されないことがある
- 突然発生することもある。原因が不明。
以上4点の問題点を踏まえ、本プロジェクトでは以下の3点の改良を行う
- 配線周りの改善
- C言語によるテストプログラムの開発
- PICプログラムの改良
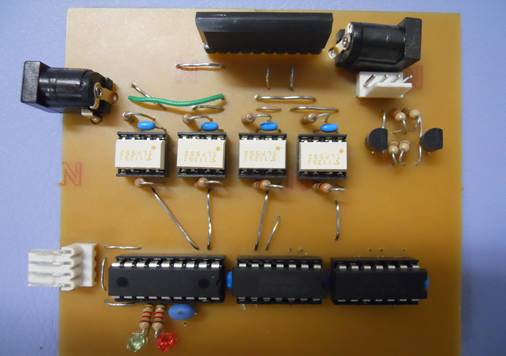
- 現状の配線およびモータ制御ボード
現在の配線およびモータ制御ボードを以下に示す
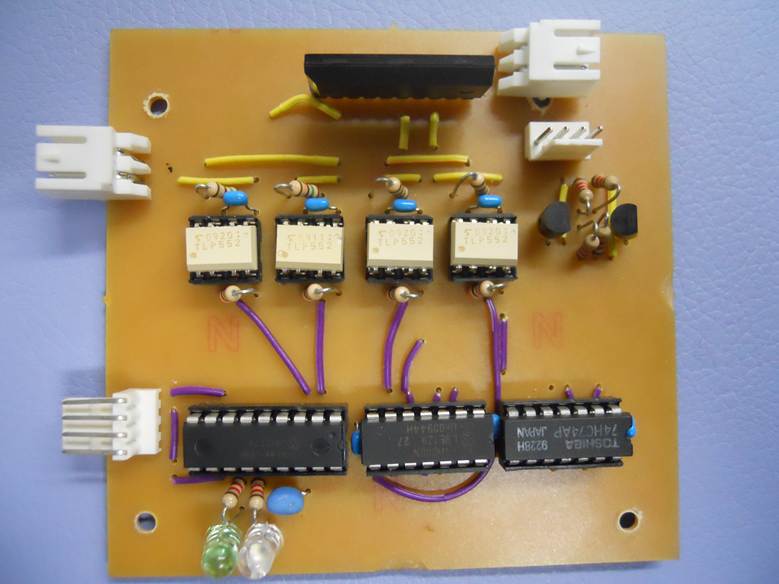

MTCBの接続コネクタは接触に不具合を起こすことが多く、またデバック作業等で何度も抜き差しするとはんだ面がグラついてしまい
はんだが浮いてしまう、接触不良に陥ることが多かった。
そこで強い衝撃や、接続ミスを防ぐことを目的とし、
- 新しいコネクタの導入
- 空中配線を可能とする
ことをコンセプトに改良を試みた
- 新コネクタ
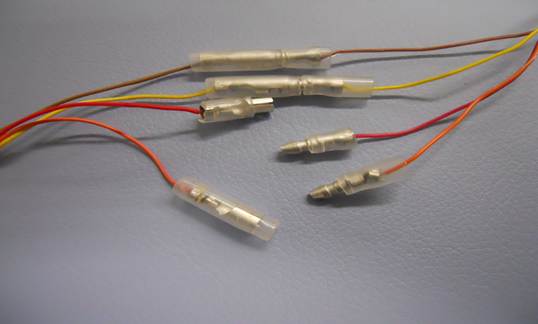
- ギボシ端子
ギボシ端子は車関係の機器配線によく用いられており、長所として
- 取り外しが容易
- 従来のコネクタに比べ頑丈
が挙げられる。一方短所として- 製作に手間がかかる
- 取り外しの際に、ギボシ端子と導線の接続部が取れやすいので注意が必要
といったことが挙げられるが、一度接続した後はあまり取り外しを繰り返さない箇所には有効と考えられる。
製作したギボシ端子によるコネクタを以下に示す。


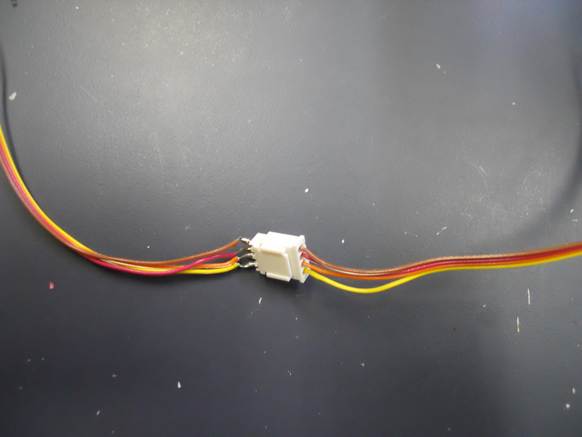
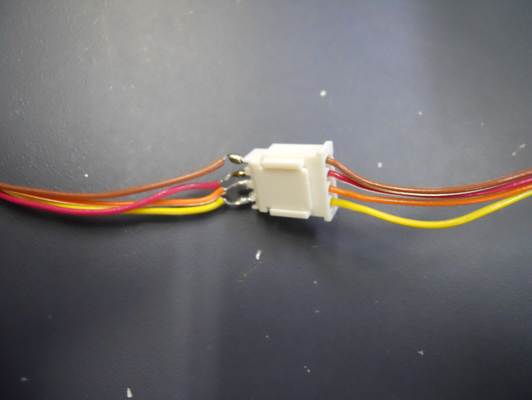
- 4ピンコネクタを用いた空中配線
従来はMTCBの基板上にコネクタを接続し、抜き差ししていたが、繰り返し何度も抜き差しをすると
基板とコネクタを接続するはんだ面が緩くなってしまう問題を抱えていた。そこで、4ピンコネクタを空中で接続する
ように改良を行い、基板上のコネクタは常に接続したままとし、コネクタの抜き差しは配線上に設けたコネクタでおこなうこととする
長所としては- ボードから直接抜き差しせずに空中で接続できるため、断線等の故障を防ぐことができる
- 極めて抜き差しがしにくい
- コネクタ(オス)と導線をはんだ付けにより接続しているため、断線の可能性が残る
結果となった。作成したコネクタを以下に示す。実際に利用するか否かは各チーム状況を見て判断してほしい
- DCジャックコネクタ
DCプラグ(DCジャック,マル信無線電機)はACアダプタなど、家電製品に利用されている
長所としては- 極めて取り外しが容易
- 従来のコネクタに比べて極めて頑丈
と他の2つのコネクタに比べて利点が大きい。短所についても
- 製作に手間がかかる
- 価格が比較的高い
が挙げられるが、今回取り組んだ新コネクタとしては最有力であるといえる。開発したコネクタおよび基板上に取り付けた例を以下に示す


- ギボシ端子
- まとめ
本プロジェクトでは配線周りの改良として、3種類のコネクタを試作し、新MTCBのコネクタ周りを変更した
一番有用であったのはDCジャックを用いるタイプで、今後新たにMTCBを作る場合にはDCジャック対応型のものを製作することをお勧めする
改良後の基板加工データを以下に示す
基板加工データ
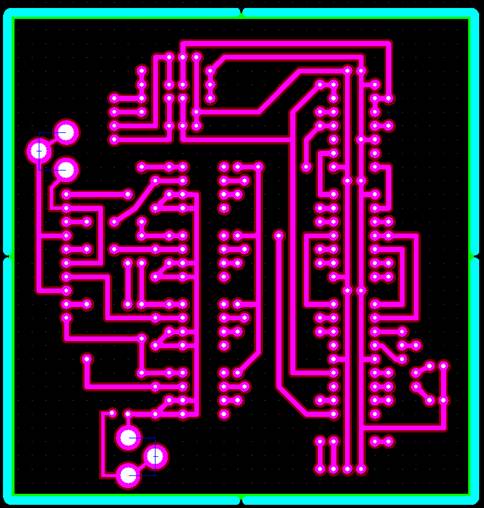
基本的には従来のボードと変更はないので、MIRSMG3D MTCB製造仕様書を参考にすること。
変更点は「CN1,CN2」のコネクタ変更のみである。
- 問題点
- MIRS走行中にロータリエンコーダの値を取得できないことがある
- 走行距離を指定した場合、安定して停止することができない
- 目標値に達すると急激にブレーキがかかってしまうため、滑らかな走行ができない
- 改善策
エラーデータの例を以下に示す。下図に示すのはmotor_test()を用いてval=1000[mm],time=1000[ms]を指定した場合である
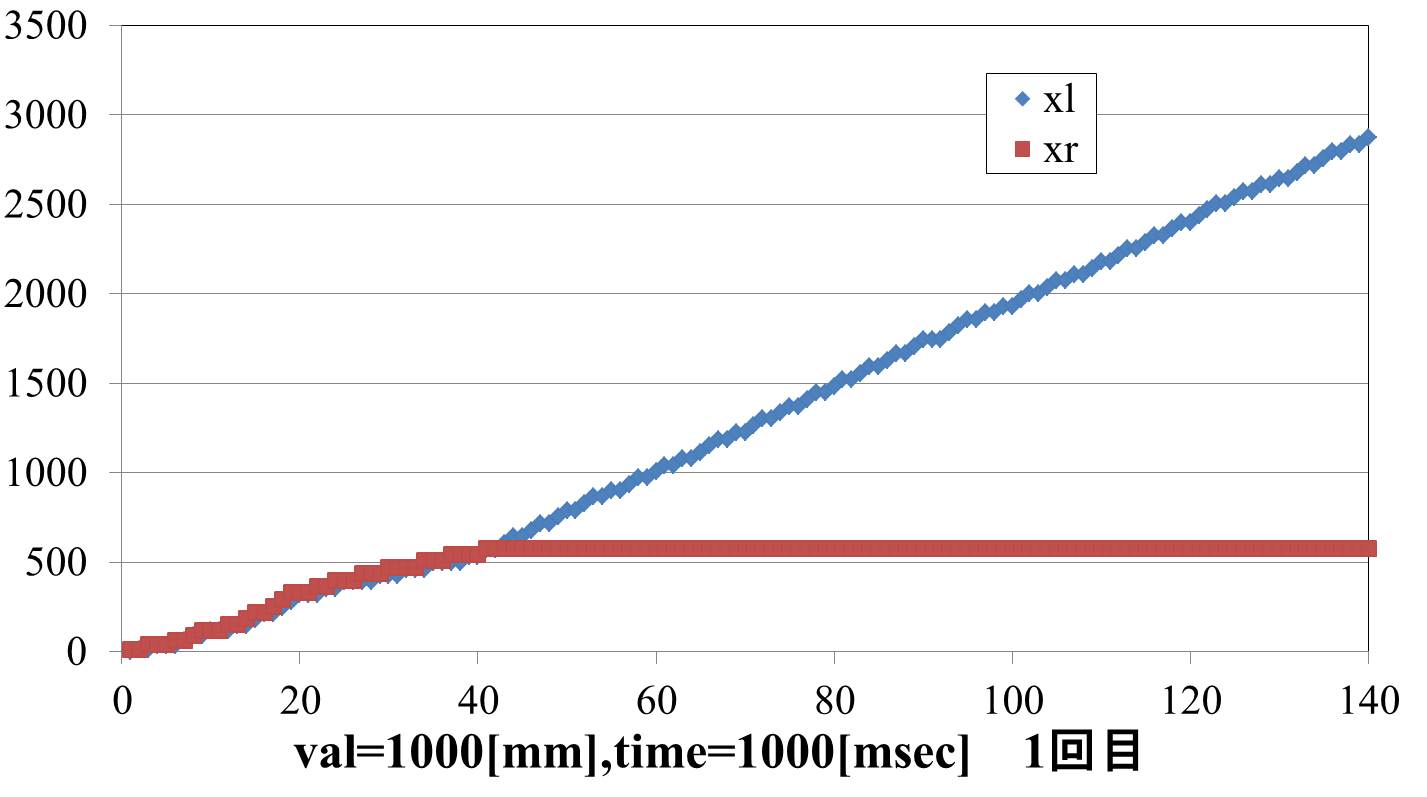
図を見て明らかなように、右のモータに取り付けられたエンコーダが40ステップを越えてから変化しなくなっている
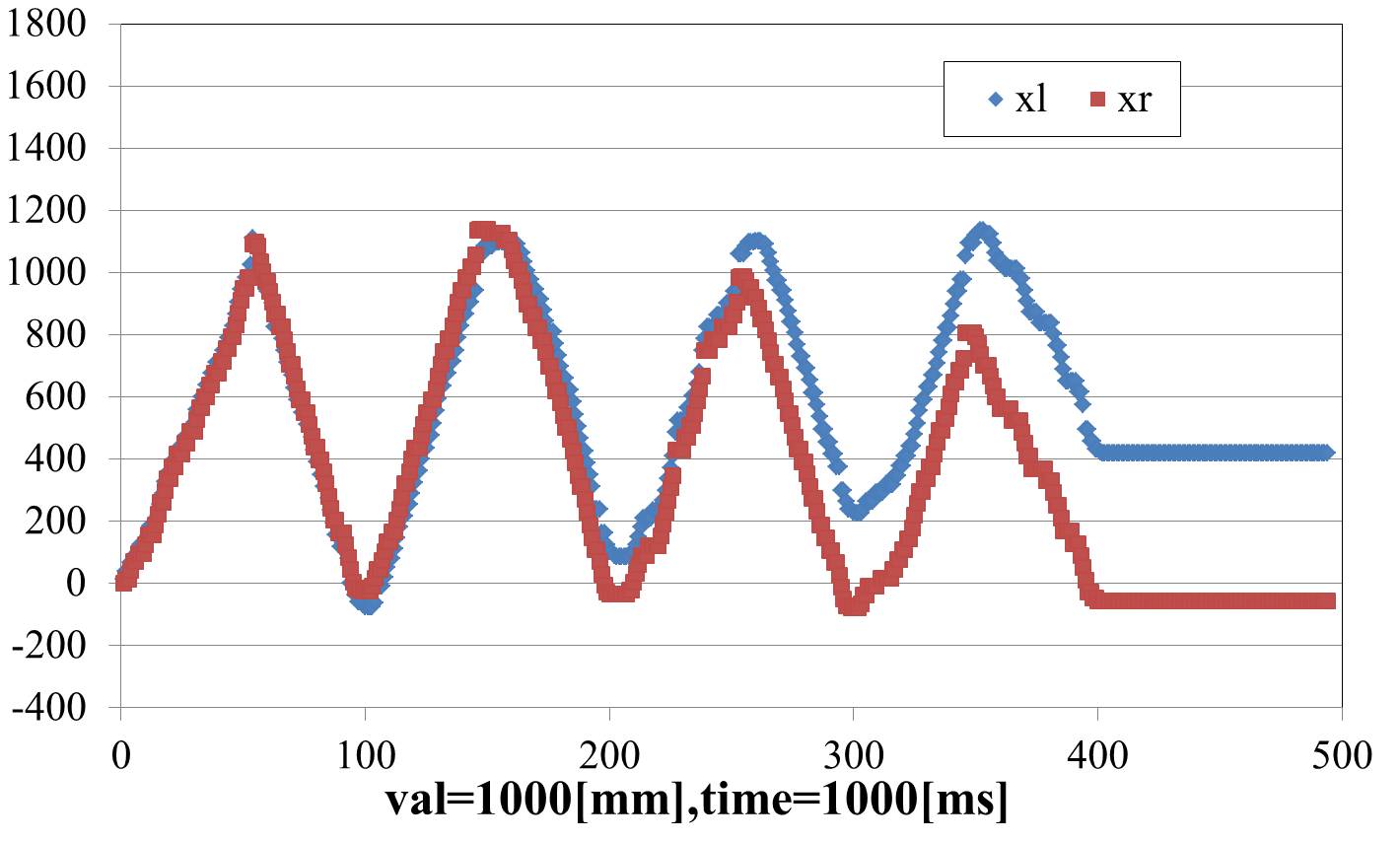
一方、下図に示すのはval=1000[mm]の往復運動を指定した場合である
- PIC16F88に書き込まれているintegration.hexの内容の変更
①delay_usを失くすことによりモータの総回転数の通信不具合を改善
②PWM制御による制御パルスが、PICの制御周期幅を超えたときに入る分岐処理の改善により安定して目標値の収束することを可能にした。
※変更したプログラムのリンクをここに示すので適宜参照すること。
※HEXファイルのリンクはここ
改善後のプログラムを用いて走行試験を行った結果を下図に示す
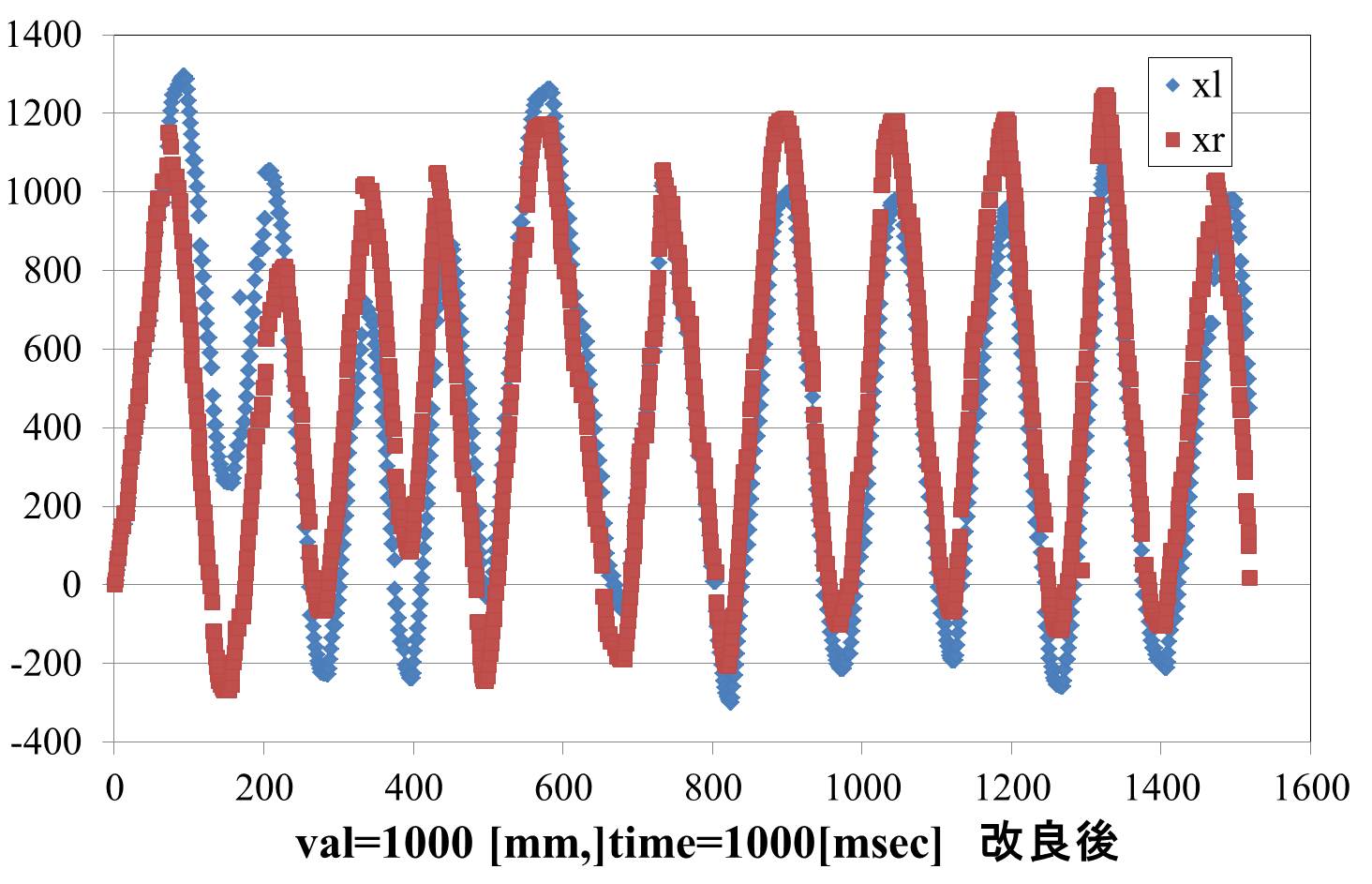
図を見ての明らかなように、繰り返しの駆動を行ってもエラーが発生しなくなったことがわかる
- 条件分岐の条件変更
- 現状の問題点
- テストプログラムの改良
- 現状の問題点
- 改良点
- 直進制御、回転制御、ポスト周回制御に加え単純な速度指定による走行制御を選択できるようにした
- 左右のモータの速度と移動距離をファイル出力できるようにした。
- 目標地点と現在地点の条件分岐が絶対値で表現されていたのを変更
目標値に達しても停止せずに加速することがある。
これは、motor_thread.cにおいて目標地点と現在地点における条件判断に不備があると考えた。改良前のソースコードの一部を以下に示す。
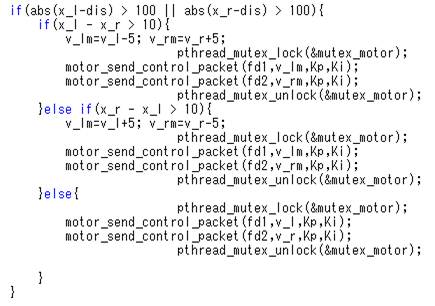
このプログラムでは目標地点と現在地点の差分を絶対値で評価しているため、目標値に達する前と達してからの処理が同様になってしまっている。
改良後のソースコードの一部を以下に示す
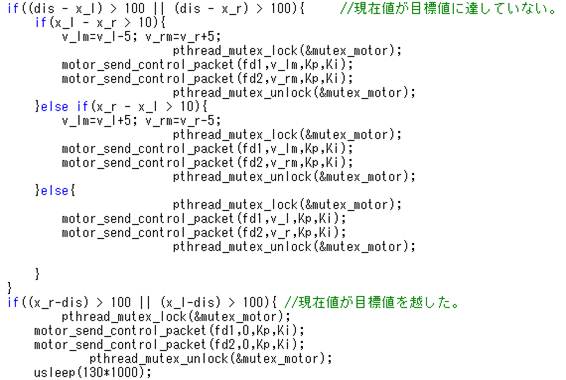
これにより、目標値に近づくまでと目標値を越えてからの条件を分けることに成功し、走行中の動作(特にmotor_test())が安定した
motor_start()とmotor_test()の2つのテストプログラムが存在する
これによりモータ関連のデータを取る際、回転数、速度等をグラフ化できるようになった
さらに指定した走行距離に対して、MIRSが目標値を越え、判断基準地点を超えた場合にはその場で停止するようになった
- 実際の開発日程を以下に示す.

梅原 優太
-
12月からスタートしたモーター制御ボードプロジェクトチームのみんな、短い間でしたがお疲れ様でした。
私は、チームでハード面のトラブル対策を担当させてもらい、新しいコネクタやケーブルの導入等
目に見える物として成果を出すことができ、とてもやりがいを感じました。
モーター制御ボードに関しては、当初からトラブルに悩まされてきたので、
今回のプロジェクト発足時には、快く参加させてもらいました。
実際は、回路からプログラムに至るまでモーター制御ボードを理解するところから始まり、
最後はボードの量産など、大変な時間が長く続きましたが、
本当にこのプロジェクトに参加できて良かったと思います。ありがとうございました。
志村 英見
-
今回、駆動系に問題があるということで、班から一人プロジェクトに参加することになった。
これにより、しばらく班のMIRSに貢献することができなかったが、モーター制御ボード周りの仕組みなどの講義を受けることができた。
この経験は授業にはない方面であり、いい刺激になったと思う。
私は主にCプログラムの調査、改善を担当した。
手伝いとして現D5の馬飼野さんの作成したCプログラムでMIRSのモータの動作を調査することが主な内容となった。
MIRSのロータリーエンコーダは反応していないことがあるとわかり、原因の一つを突きとめることができたと思う。
また、改善したプログラムはテストプログラムとして載せてあるので、いつか活用されるうれしく思う。
また、プログラムとしては大きな不良動作の原因を見つけることができなかったが、今回のテストプログラムはPICプログラムの動作チェックなどに用いることができたのでプロジェクトに貢献できてよかった。
田代 純也
-
モーター制御ボードプロジェクト(MCBP)では、PICプログラムの改良を担当した。
1か月半くらいの期間で相当詰め込んで改良にあたったが、最終的にはそれなりの改善ができてよかったと思っている。
私はモーター制御ボード(MCB)の回路やプログラムの中身について何一つ知っていることがなかったのですが、このプロジェクトのおかげで、すこしは知識が身についた。 改良されたMCBが正常に動いてくれてほんとによかったし、それを使ってMIRS開発してくれていて役に立ったんだなと実感した。
このPICプログラムを活用してゴールを目指してほしい。でも、MCBの改良は続けてほしい。
西村 和真
-
この際も、このボードに関する知識や仕組みの理解が不十分だったため、問題解決のプロセスを立てることは不可能だった
しかし、これも先に同様でMTCBプロジェクトのメンバーとの協力、青木先生のアドバイスによりMTCBに関する知識を得ることができた。結果として、モータコントロールボードの改善を実現することができた。
MIRSの開発を通して得たことは、「チームワークの大切さ」・「責任の重さ」・「問題解決のプロセス」などです。
1点目の「チームワークの大切さ」は、何か事を成し遂げようとする際、1人ですべてをカバーするこは不可能に等しいということです。
2点目の「責任の重さ」は自分が任された仕事が完成しなければ、自分の他の班員に迷惑をかけチーム全体に様々なデメリットを及ぼすということです。
3点目の「問題解決のプロセス」とは原因の究明、問題に対する改善策の立案、改善策の実行、デバックというような過程のことです。
当たり前のようなことだと思いますが、これらの要素はそれも重要なことです。当たり前のことをそれ以上に徹底して実行することにより新たな発見を見出すことができるのだと思います。
以上のようなMIRSの開発過程で学んだことや得られたことは将来、エンジニアとして活躍するための糧となったと感じました。
安田 昇平
-
駆動系を改善するためのチームを結成するということで、何か班の力になりたいと思い参加しました。
1ヶ月で成果を出すというのは最初無理だと思っていましたが、長時間の青木先生の講義や作業を通して
納得のいく成果を上げることができたと思います。
私の班のMIRS(1105)は、競技会本番で「I/Oエラー」に苦しみました。このエラーは、配線周りを改善することで解決できたと
思っていた為、このエラーが原因で完走できなかったときは悔しかったです。
今後に残る課題を残しましたが、MIRSを自分自身やりきれたのは、駆動系チーム(MCBチーム)に入ったおかげだと思っています。
| 内容 | ファイル名 | ダウンロード |
|---|---|---|
| 基板加工データ | motor_2011.mit | DL |
| PICファイル(C言語) | integration.c | DL |
| PICファイル(hexファイル) | integration.hex | DL |