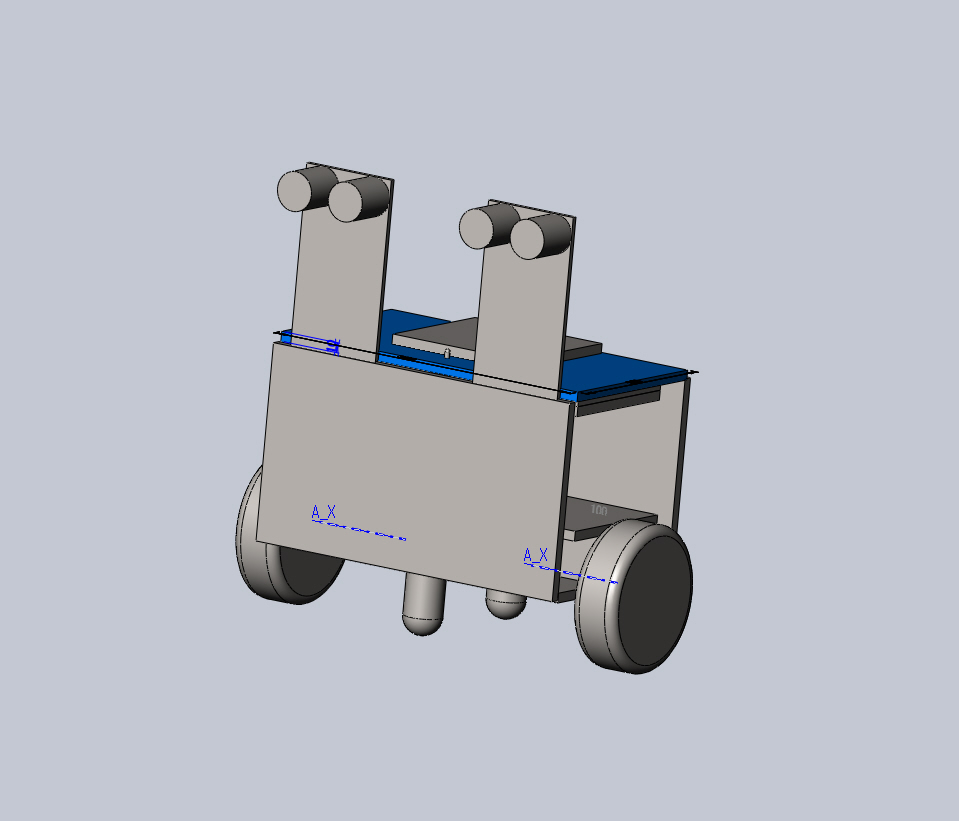
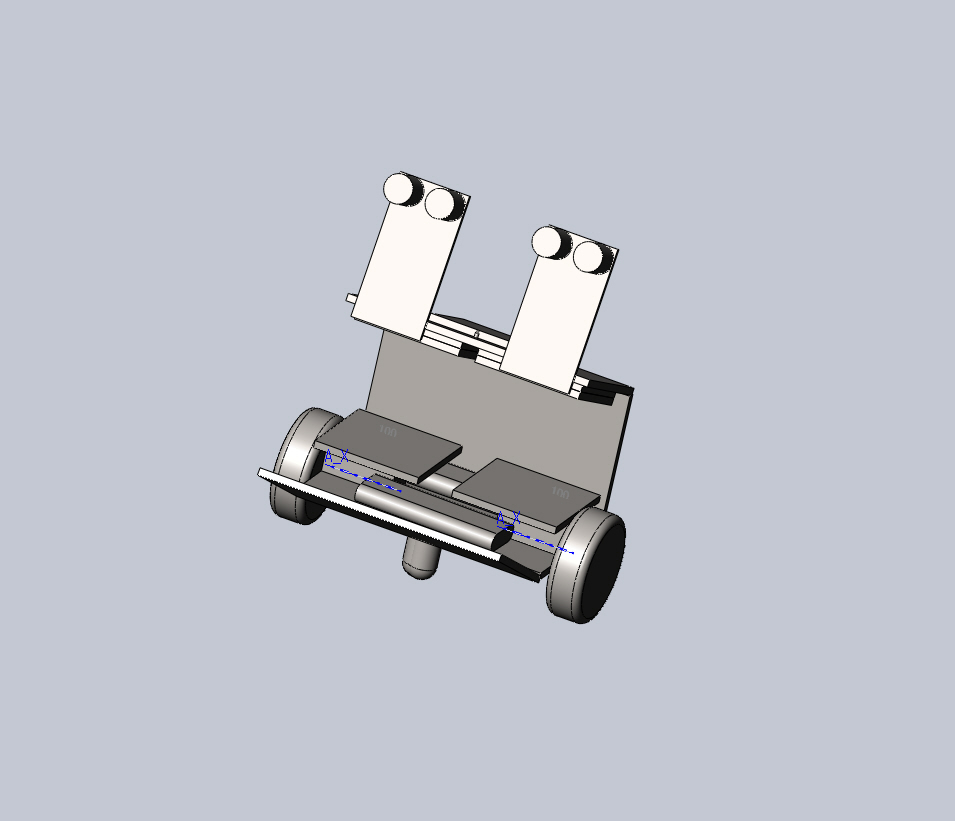
4.システム外観図
メンテナンス性を向上させるために箱型にし、その内部にボードを配置する。
また、前面と上面を開閉できるようする。(図2)箱の部分は塩化ビニール板で作成する。
|
|
| 図1 オリジナルMIRSのイメージ図(閉じた状態) | 図2 オリジナルMIRSのイメージ図(開いた状態) |
| 名称 | MIRS1304 システム提案書 |
|---|---|
| 番号 | MIRS1304-DSGN-0001 |
最終更新日:2013.10.30
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2013.10.25 | 前田球太 | 初版 | |
| A02 | 2013.10.30 | 前田球太 | モーターの購入を止め、イメージ図を変更した。 | |
| A03 | 2013.10.30 | 前田球太 | メリットの記述の追加 |
|
|
|
| 図1 オリジナルMIRSのイメージ図(閉じた状態) | 図2 オリジナルMIRSのイメージ図(開いた状態) |