はじめに
本ドキュメントは、MIRS1301,1303,1304班共同のI2Cマスターボード詳細設計書である。
機能概要
今年度は競技に参加する全4班のうち3班がI2C通信を必要とする。
そのためにCPUボードにI2Cインタフェースを持たせるための回路を共同で開発する。
I2Cはバス形式の通信方式であるため、バスを管理する親機が必要である。
したがってこの基板には、CPUボードから制御可能なI2C親機としての機能が要求される。
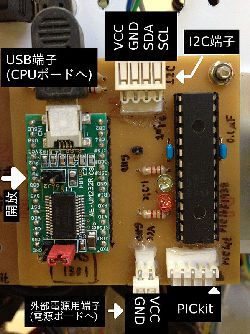
CPUボードとのインターフェースには現在広く普及しているUSBを用いる。
仕様詳細
回路図
この基板の回路図を以下に示す。
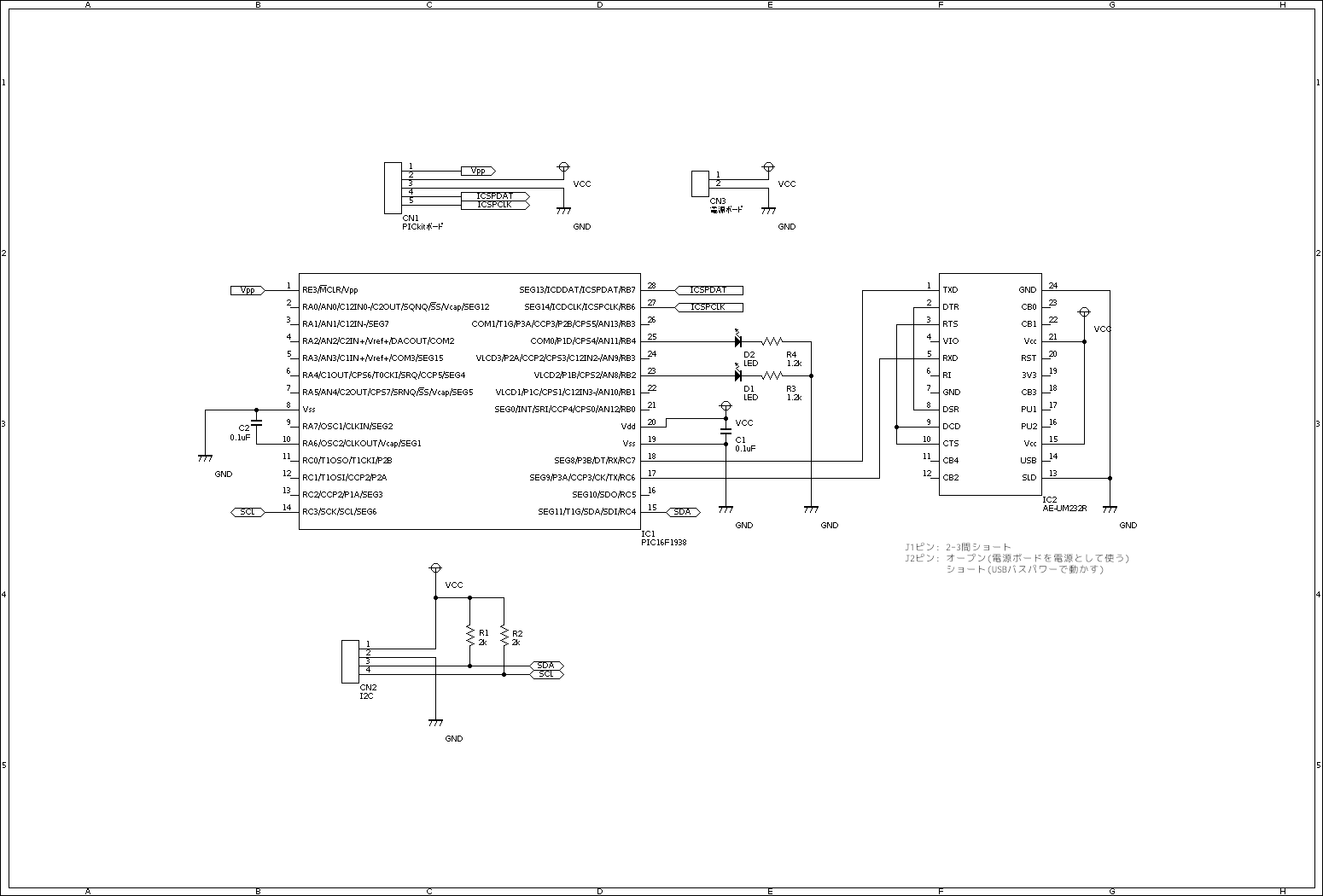
IC1: PIC16F1938
I2C親機用PICである。IC2: AE-UM232R
USB-RS232C変換デバイスである。
PICで直接USB通信を行うのは難易度が高いため、
USBシリアル変換デバイス(IC2:AE-UM232R)によってRS232C信号に変換してからPICと通信する。
このデバイスを使うためのデバイスドライバはLinuxのkernel 2.6.31から標準でインストールされているので、
MIRS標準機のubuntu10.04なら特になにもせずに接続可能である。
なおCPUボードからはシリアルポートとして認識される。
(補足: USB通信用のコネクタはIC2:AE-UM232Rに用意されている。)
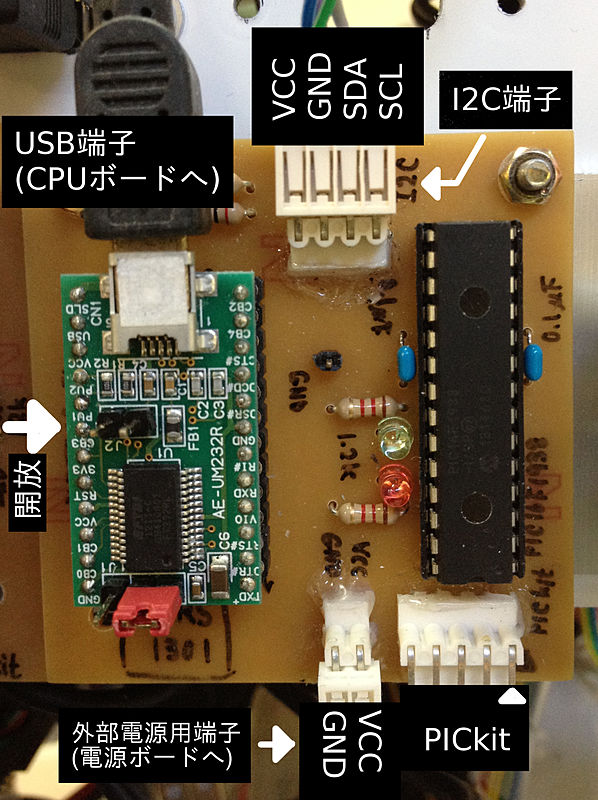
CN1,CN2,CN3: コネクタ
CN1はPICkit2/3によるプログラム書き込み用のコネクタである。
書き込み時の使用が推奨されているプルアップ抵抗およびプルダウン抵抗は、 PICkitボードとして独立させてある。
つまりI2Cマスターボード --- PICkitボード --- PICkit2/3 の順でカスケード接続する形になる。
CN2はI2C通信用のコネクタである。I2Cのプルアップ抵抗はR1,R2として用意してある。
CN3は電源ボードからの電源を供給するためのコネクタである。
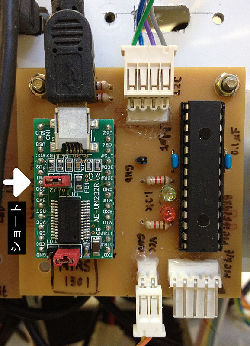
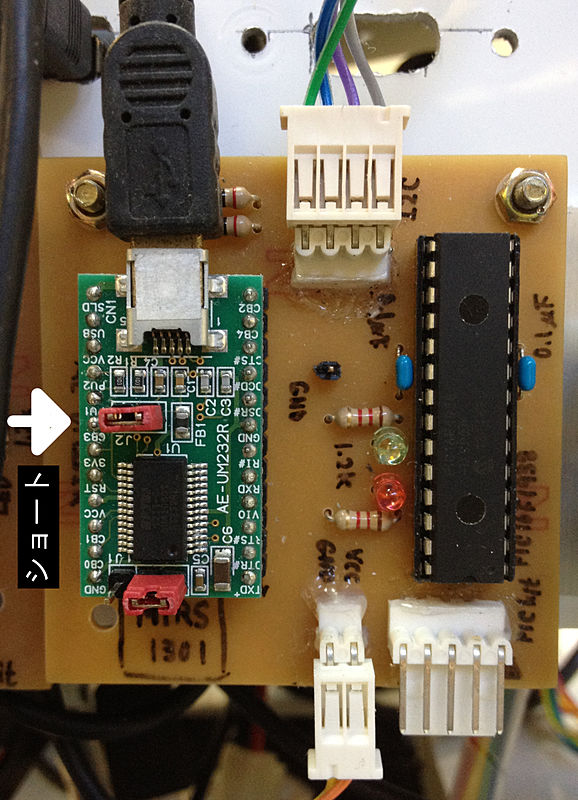
なお、電源はUSBバスパワーからのものと電源ボードから直接供給するものの2系統から選択可能である。
電源の設定はIC2:AE-UM232Rに用意されたジャンパーピンによって行う。
I2Cバスに接続するデバイスが少ない場合はUSBバスパワーからの供給で問題ないが、
多数のデバイスを接続する場合には電源ボードからの供給に切り替える必要がある。
通信プロトコル
CPUボード送信時
- CPUボードが、I2C通信の1バイト目(I2Cデバイスのアドレス 7bitとR/W選択ビット)を、本ボードに送信する。
- CPUボードが、送信するバイト数を、本ボードに送信する。最大255バイト。
- CPUボードが、スレーブとの通信が正常に開始されたかどうかを、本ボードから受信する。
スレーブの存在できなかった場合は通信サイクルが終了し、本ボードは初期状態に戻る。 - CPUボードが、送信データを1バイトづつ、本ボードに送信する。
- CPUボードが、正常に送信できたバイト数を、本ボードから受信する。
- 本ボードが、初期状態にもどる。
- CPUボードが、I2C通信の1バイト目(I2Cデバイスのアドレス 7bitとR/W選択ビット)を、本ボードに送信する。
CPUボード受信時
- CPUボードが、I2C通信の1バイト目(I2Cデバイスのアドレス 7bitとR/W選択ビット)を、本ボードに送信する。
- CPUボードが、送信するバイト数を、本ボードに送信する。最大255バイト。
- CPUボードが、スレーブとの通信が正常に開始されたかどうかを、本ボードから受信する。
スレーブの存在できなかった場合は通信サイクルが終了し、本ボードは初期状態に戻る。 - CPUボードが、受信データを1バイトづつ、本ボードから受信する。
- 本ボードが、初期状態にもどる。
- CPUボードが、I2C通信の1バイト目(I2Cデバイスのアドレス 7bitとR/W選択ビット)を、本ボードに送信する。
リセット方法
PICが起動している場合、ブレーク信号を受信するといかなる状態においてもただちにリセットされる。
作成方法
基板加工機用 mit ファイル
I2CMasterBoard.mit
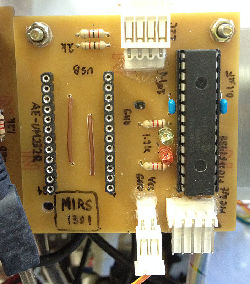
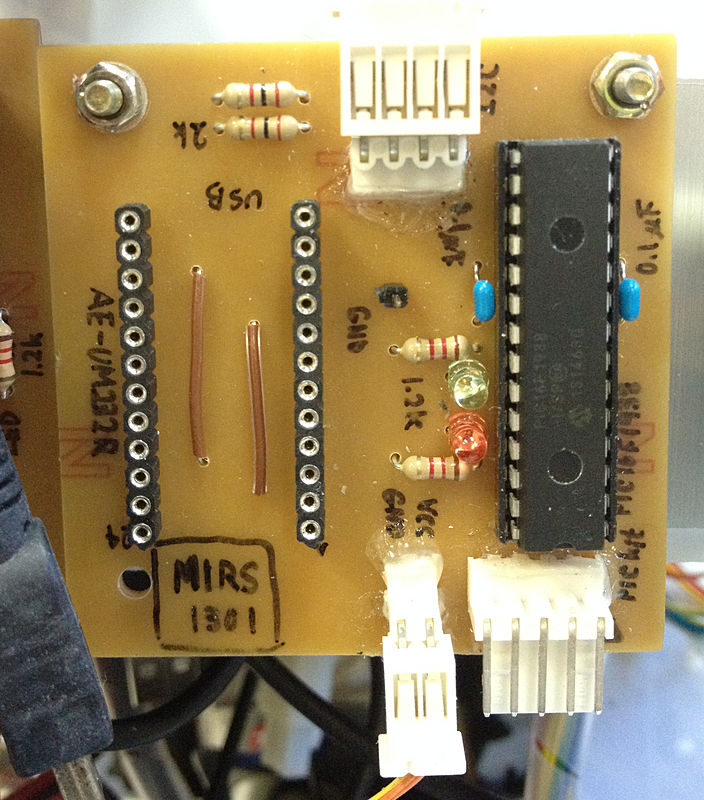
パターン図および実装図
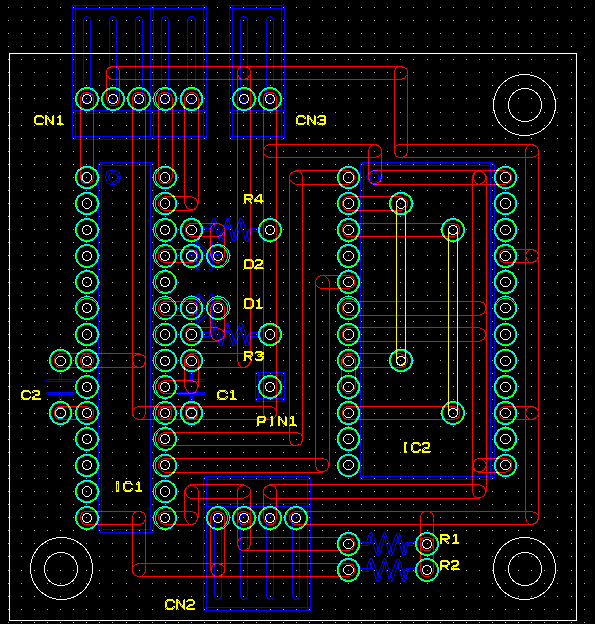
パターン図と実装図を以下に示す。
PIN1はオシロスコープ用GNDピンである。
使用部品
作成に必要な部品を以下に示す。
記号 部品名 商品名 数量 備考 IC1 PIC PIC16F1938 1 I2C親機用 IC2 USBシリアル変換モジュール AE-UM232R 2 USBインターフェース用 R1,R2 抵抗 2kΩ 2 I2Cバスのプルアップ用 R3,R4 抵抗 1.2kΩ 2 LEDの電流制限用 C1,C2 セラミックコンデンサ 0.1uF 2 パスコン D1 LED 緑色LED 1 デバッグ用 D2 LED 赤色LED 1 デバッグ用 CN1 コネクタ MOLEX 5pin 1 PICkitボード用 CN2 コネクタ MOLEX 4pin 1 I2Cバス用 CN3 コネクタ MOLEX 2pin 1 電源用 PIN1 ピンヘッダ 1pinヘッダ 1 デバッグ用GNDピン プログラム
MIRS1301 エレクトロニクス詳細設計書からダウンロードできる。
テスト方法
MIRS1301 ソフトウェア詳細設計書からダウンロードできるファイルに、テストプログラムが含まれている。