| 柤徧 | MIRS1104 奐敪寁夋彂 |
|---|---|
| 斣崋 | MIRS1104-PLAN-0003 |
嵟廔峏怴擔:2011.7.15
| 斉悢 | 嵟廔峏怴擔 | 嶌惉 | 彸擣 | 夵掶婰帠 |
|---|---|---|---|---|
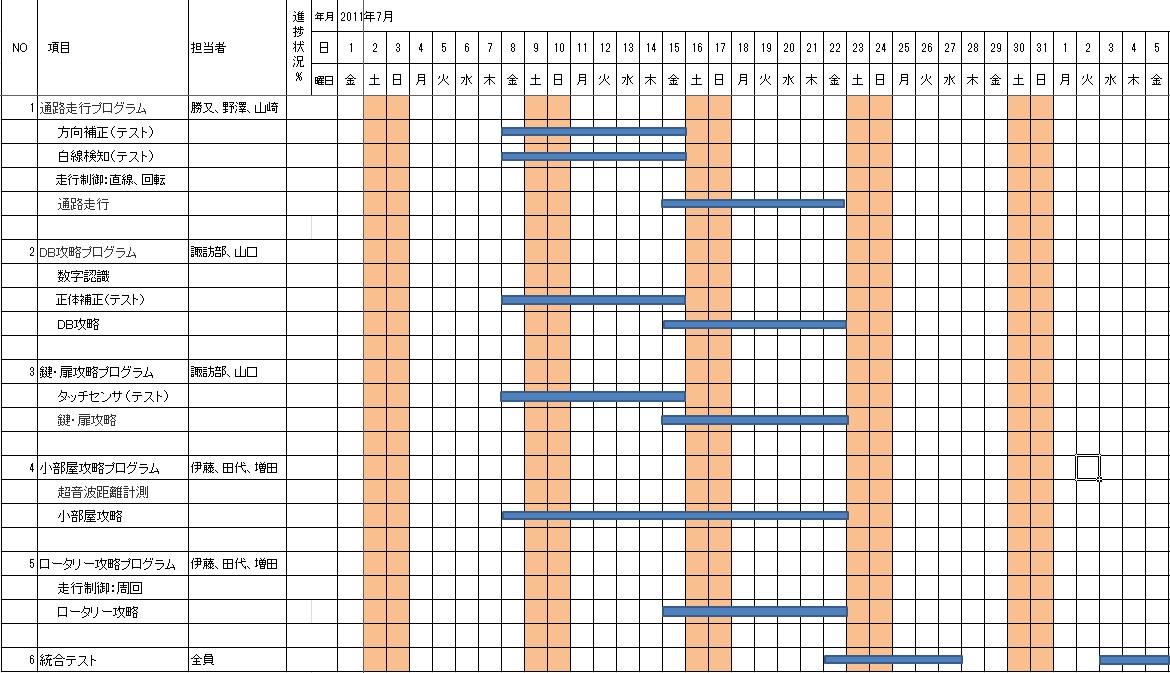
| A01 | 2011.7.8 | 栰郪 | 彑枖(惵栘桰桽) | 弶斉 |
| 婡擻柤 | 婡擻奣梫 | 巊梡偡傞梫慺婡擻 | ||
|---|---|---|---|---|
| 梫慺婡擻 | 1-1 | 捈恑憱峴 | 巜掕偟偨嫍棧傪丄巜掕偟偨帪娫偱捈恑偡傞丅 | |
| 1-2 | 夞揮憱峴 | 巜掕偟偨妏搙傪丄巜掕偟偨帪娫偱偦偺応夞揮偡傞 | ||
| 1-3 | 廃夞憱峴 | 巜掕偟偨敿宎偱丄巜掕偟偨妏搙傪丄巜掕帪娫偱丄巜掕曽岦偵廃夞偡傞丅 | ||
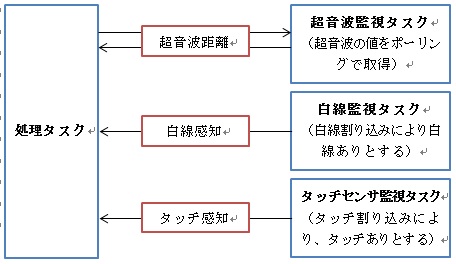
| 1-4 | 挻壒攇嫍棧寁應 | 挻壒攇偱暔懱偲偺嫍棧傪寁應偡傞丅 | ||
| 1-5 | 悢帤擣幆 | 俢俛忋偵偁傞悢帤傪擣幆偡傞丅 | ||
| 1-6 | 敀慄擣幆 | 敀慄傪擣幆偡傞丅 | ||
| 1-7 | 僞僢僠僙儞僒擣幆 | 僞僢僠僙儞僒偺ON/OFF傪擣幆偡傞丅 | ||
| 曗惓丒暅婣婡擻 | 2-1 | 惓懳曗惓 | 慜柺嵍塃偺挻壒攇僙儞僒傪巊偄丄惓柺偺斅偵惓懳偡傞丅 | 1-2, 1-4 |
| 2-2 | 曽岦曗惓 | 懁柺偺挻壒攇僙儞僒傪巊偄丄憱峴曽岦傪曗惓偡傞 | 1-1,1-2,1-4 | |
| 2-3 | 捠楬暅婣 | 僞僢僠僙儞僒偑斀墳偟偨傜丄捠楬拞墰偵暅婣偡傞丅 | 1-7, 1-1, 1-2, 1-4 | |
| 敾掕婡擻 | 3-1 | 巇妡偗恑擖敾掕 | 巇妡偗乮僑乕儖傪娷傓乯偵擖偭偨偙偲傪敾掕偡傞丅 | 1-4, 1-5, 1-7 |
| 3-2 | 巇妡偗捠夁敾掕 | 巇妡偗偐傜弌偨偙偲傪敾掕偡傞丅 | ||
| 巇妡偗捠夁 | 4-1 | 儘乕僞儕乕捠夁 | 1-3 | |
| 4-2 | 彫晹壆捠夁 | 1-1, 1-2, 1-4 | ||
| 4-3 | 尞捠夁 | 1-4, 1-8 | ||
| 4-4 | 僑乕儖 | 1-6 | ||
| 4-5 | DB擣幆 | 1-5,1-6,2-1 | ||
| 捠楬憱峴 | 5-1 | 捠楬憱峴 | 1-1, 1-2, 1-4, 1-5, 1-6, 1-7, 2-1, 2-2,,2-3 3-1 |