1.始めに
2.全体図
3.構成部品
4.組み立て手順
5.各設計書へのリンク
1.始めに
本ドキュメントはMIRS2101におけるジンバル部に関するメカニクス詳細設計書について記述したものである。
2.全体図
ジンバルユニットの全体図を次のfig1に、3面図をfig2に示す。
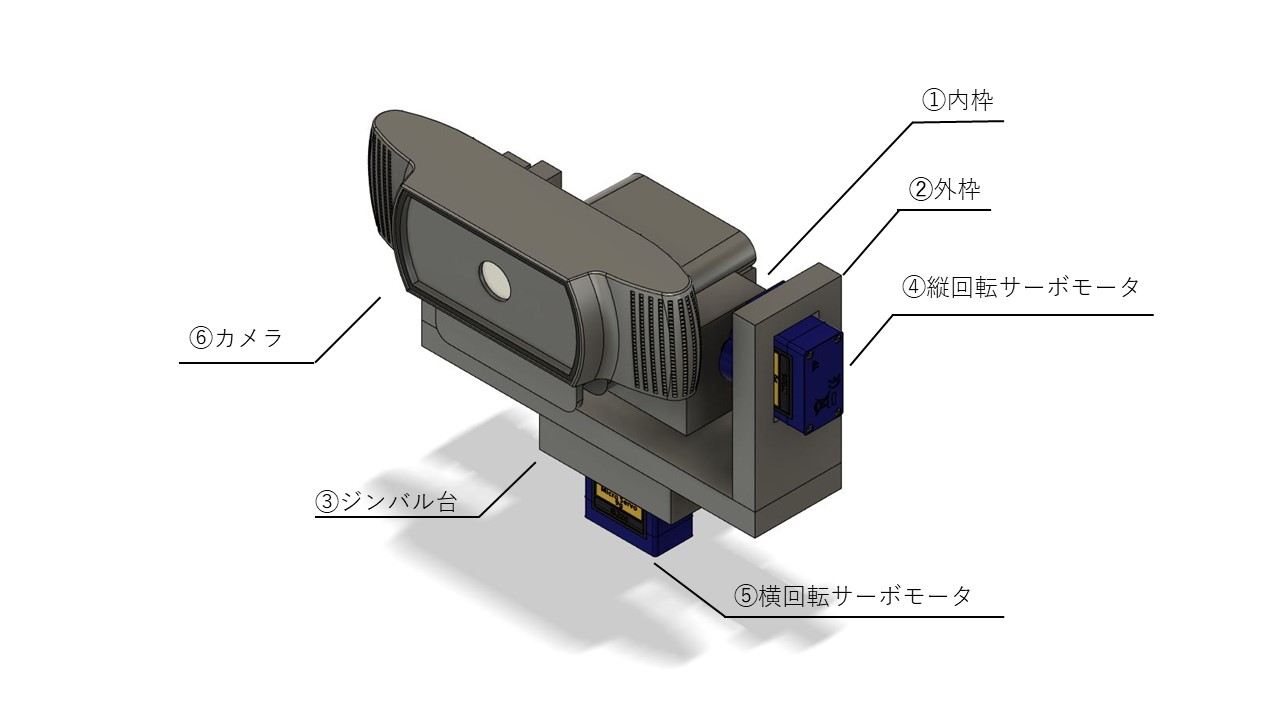
fig1.ジンバルユニット
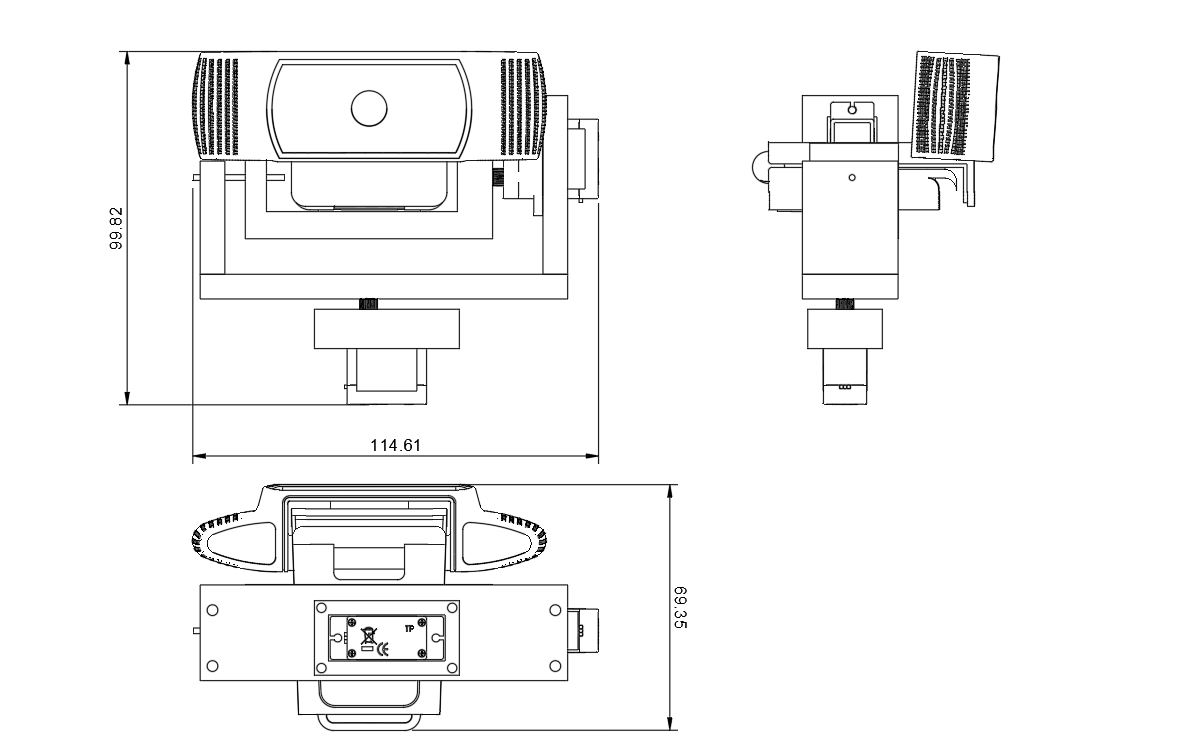
fig2.ジンバルユニット3面図
次のtabel1に各機能の機能説明を示す。
tabel1.ジンバルユニット機能説明
割り振り番号
名称
機能説明
製造方法
①
内枠
カメラの固定及び④との接続
3Dプリンタによる出力
➁
外枠
④の固定及び⑤との接続
3Dプリンタによる出力
③
ジンバル台
⑤の保護
3Dプリンタによる出力
④
縦回転サーボモータ
縦方向へのカメラ方向調整
既製品を使用マイクロサーボ9g SG-90
⑤
横回転サーボモータ
横方向へのカメラ方向調整
既製品を使用マイクロサーボ9g SG-90
⑥
カメラ
写真撮影
既製品を使用C930webカメラ
3.構成部品
作成する部品について、以下のtabel2に示す。
tabel2.構成部品
構成部品名
個数
素材
備考
Gimbal_Frame1
1
ABS樹脂
3Dプリンタで出力図面
Gimbal_Frame2
1
ABS樹脂
3Dプリンタで出力図面
Gimbal_Frame3
1
ABS樹脂
3Dプリンタで出力図面
Gimbal_Frame4
1
ABS樹脂
3Dプリンタで出力図面
Gimbal_Frame5
1
ABS樹脂
3Dプリンタで出力図面
Gimbal_Motor1
1
秋月電子にて購入マイクロサーボ9g SG-90
Gimbal_Motor2
1
秋月電子にて購入マイクロサーボ9g SG-90
Gimbal_Camera
1
配布されたカメラを使用C930webカメラ
4.組み立て手順
1.昇降台にGimbal_Mortor2を取りつける。
2.昇降台にGimbal_Fream5を取りつける。
3.Gimbal_Fream2にGimbal_Fream3及びGimbal_Fream4を取りつける。
4.Gimbal_Fream2をGimbal-Mortor2に取りつける。
5.Gimbal_Fream4にGimbal-Mortor1を取りつける。
6.Gimbal-Mortor1にGimbal-Fream1を取りつける。
7.Gimbal-Fream1にGimbal-Cameraを取りつける。
5.各設計書へのリンク
昇降台設計書
昇降機構設計書
天板設計書
外装設計書
足回り設計書
タブレット設計書
タブレットケース設計書
MIRS2101ドキュメント管理台帳へ
fig1.ジンバルユニット
fig2.ジンバルユニット3面図
次のtabel1に各機能の機能説明を示す。
2.昇降台にGimbal_Fream5を取りつける。
3.Gimbal_Fream2にGimbal_Fream3及びGimbal_Fream4を取りつける。
4.Gimbal_Fream2をGimbal-Mortor2に取りつける。
5.Gimbal_Fream4にGimbal-Mortor1を取りつける。
6.Gimbal-Mortor1にGimbal-Fream1を取りつける。
7.Gimbal-Fream1にGimbal-Cameraを取りつける。
昇降機構設計書
天板設計書
外装設計書
足回り設計書
タブレット設計書
タブレットケース設計書
MIRS2101ドキュメント管理台帳へ
tabel1.ジンバルユニット機能説明
| 割り振り番号 | 名称 | 機能説明 | 製造方法 |
|---|---|---|---|
| ① | 内枠 | カメラの固定及び④との接続 | 3Dプリンタによる出力 |
| ➁ | 外枠 | ④の固定及び⑤との接続 | 3Dプリンタによる出力 |
| ③ | ジンバル台 | ⑤の保護 | 3Dプリンタによる出力 |
| ④ | 縦回転サーボモータ | 縦方向へのカメラ方向調整 | 既製品を使用マイクロサーボ9g SG-90 |
| ⑤ | 横回転サーボモータ | 横方向へのカメラ方向調整 | 既製品を使用マイクロサーボ9g SG-90 |
| ⑥ | カメラ | 写真撮影 | 既製品を使用C930webカメラ |
3.構成部品
作成する部品について、以下のtabel2に示す。tabel2.構成部品
| 構成部品名 | 個数 | 素材 | 備考 |
|---|---|---|---|
| Gimbal_Frame1 | 1 | ABS樹脂 | 3Dプリンタで出力図面 |
| Gimbal_Frame2 | 1 | ABS樹脂 | 3Dプリンタで出力図面 |
| Gimbal_Frame3 | 1 | ABS樹脂 | 3Dプリンタで出力図面 |
| Gimbal_Frame4 | 1 | ABS樹脂 | 3Dプリンタで出力図面 |
| Gimbal_Frame5 | 1 | ABS樹脂 | 3Dプリンタで出力図面 |
| Gimbal_Motor1 | 1 | 秋月電子にて購入マイクロサーボ9g SG-90 | |
| Gimbal_Motor2 | 1 | 秋月電子にて購入マイクロサーボ9g SG-90 | |
| Gimbal_Camera | 1 | 配布されたカメラを使用C930webカメラ |
4.組み立て手順
1.昇降台にGimbal_Mortor2を取りつける。2.昇降台にGimbal_Fream5を取りつける。
3.Gimbal_Fream2にGimbal_Fream3及びGimbal_Fream4を取りつける。
4.Gimbal_Fream2をGimbal-Mortor2に取りつける。
5.Gimbal_Fream4にGimbal-Mortor1を取りつける。
6.Gimbal-Mortor1にGimbal-Fream1を取りつける。
7.Gimbal-Fream1にGimbal-Cameraを取りつける。
5.各設計書へのリンク
昇降台設計書昇降機構設計書
天板設計書
外装設計書
足回り設計書
タブレット設計書
タブレットケース設計書
MIRS2101ドキュメント管理台帳へ