3.帋尡寢壥
3.1 揹尮儃乕僪
- 懌傝側偄晹昳偼側偐偭偨偨傔丄摿偵栤戣偼側偐偭偨丅
- 慜擭搙傕巊梡偟偰偄偨偨傔丄摿偵栤戣偼側偐偭偨丅
-
帋尡偺寢壥傪fig.1偵帵偡丅敾掕偼MIRS1304 昗弨儃乕僪帋尡寁夋彂傪婎偵峴偭偨丅乮帋尡幐攕傪亊偲偟丄帋尡惉岟傪仜偲偟偨丅乯

fig.1 惂屼宯媦傃嬱摦宯偺帋尡寢壥
帋尡寢壥偐傜惂屼宯揹尮偼擖椡揹尮偑6.2[V]傑偱偼丄弌椡揹埑傪5.1[V]偱曐偰傞偙偲丄嬱摦宯揹尮偼擖椡揹尮偑7.2[V]傑偱偼丄弌椡揹埑傪6.1[V]偱曐偰傞偙偲偑暘偐偭偨丅
3.1.1 晹昳偺僠僃僢僋
3.1.2 摫捠僠僃僢僋
3.1.3 摦嶌帋尡
3.2 僪乕僞儃乕僪
-
懌傝側偄晹昳偼側偐偭偨偨傔丄摿偵栤戣偼側偐偭偨丅 -
摫捠僠僃僢僋傪峴偭偨寢壥丄僪乕僞儃乕僪偺僺儞嵎崬晹偑偟偭偐傝偼傫偩偝傟偰偄側偐偭偨偺傪妋擣偱偒偨偨傔丄偦偙傪偼傫偩偱廋惓丅
偦傟埲奜偼栤戣偼側偐偭偨丅
3.1.1 晹昳偺僠僃僢僋
3.3.2 摫捠僠僃僢僋
3.2.3 摦嶌帋尡
僪乕僞儃乕僪偺摦嶌帋尡偵偮偄偰偺娐嫬愝掕傗摦嶌庤弴偼丄MIRS1304 昗弨儃乕僪帋尡寁夋彂偺3.2.3 摦嶌帋尡偺崁傪嶲徠丅 傑偨丄慜擭搙偲堎側傝丄TS[2]偑巊偊傞傛偆偵側偭偨偨傔丄偦偺ttf僼傽僀儖傪僐僺乕偟偨丅 偙傟偵婎偯偒丄摦嶌帋尡傪峴偭偨寢壥傪埲壓偵帵偡丅-
丒慡偰偺億乕僩偵僙儞僒傪庢傝晅偗側偄忬懺偱僾儘僌儔儉傪幚峴偟丄I/O[1乣8]丄TS[1乣4]偺偡傋偰偑侾偱偁傞偙偲傪妋擣丅
丒慡億乕僩偵堦偮偯偮偵僙儞僒傪愙懕偟偰丄愙懕偟偨億乕僩偑壗傕偟側偄忬懺偺偲偒怣崋侽偑弌椡偝傟傞偙偲傪妋擣丅
丒慡偰偺IO億乕僩偱敀慄僙儞僒偵敀偄巻傪壗夞偐嬤偯偗丄嬤偯偄偨帪偵怣崋偑1偲弌椡偝傟傞偙偲傪暋悢夞妋擣丅傑偨丄偍傛偦4cm埲撪偱敀慄専抦偑偱偒偨丅
丒慡偰偺TS億乕僩偺僞僢僠僙儞僒偵娭偟偰丄僙儞僒偵怗偭偨偲偒偵侾偺怣崋偑弌椡偝傟傞偙偲傪暋悢夞妋擣丅
3.3 儌乕僞惂屼儃乕僪
3.3.1 晹昳偺僠僃僢僋
-
儌乕僞惂屼儃乕僪偼嶐擭搙偺傕偺傪娷傔僠僃僢僋偟偨丅
偨偩偟丄嶐擭搙偺儌乕僞惂屼儃乕僪偼
MIRSMG3S 儌乕僞惂屼儃乕僪夵椙僾儘僕僃僋僩傪嶲徠偟偰僠僃僢僋偟偨丅
椉幰偲傕栤戣側偐偭偨丅
3.3.2 摫捠僠僃僢僋
-
栚帇丄僥僗僞偦傟偧傟俀夞偵傢偨偭偰僠僃僢僋傪峴偭偨丅摿偵栤戣偼側偐偭偨丅
3.3.3 摦嶌帋尡1
-
椉曽偲傕僠僃僢僋偟偨丅僪乕僞儃乕僪偺僔儕傾儖侾偲僔儕傾儖俀偺椉曽偑巊梡偱偒傞偐妋偐傔偨丅
RE.hex傪PIC偵從偒偙傫偩丅
儘乕僞儕僄儞僐乕僟傪夞偟丄siotest傪幚峴偟偰丄夞揮妏偑曄壔偟偰偄傞偐傪挷傋偨丅
傑偨丄僔儕傾儖侾偲僔儕傾儖俀偺椉曽偵愙懕偟偰傕栤戣側偄偐傕挷傋偨丅
傑偨丄LED侾偑惓揮丄斀揮偵墳偠偰曄壔偟偰偄傞偐傕挷傋偨丅
LED俀偑徚摂偟偨傑傑偱偁傞偙偲傕妋擣偟偨丅
3.3.4 摦嶌帋尡2
-
丂偙偺帋尡偼MIRSMG3D MTCB惢憿巇條彂偺Fig.2傪嶲徠偟偰峴偭偨丅
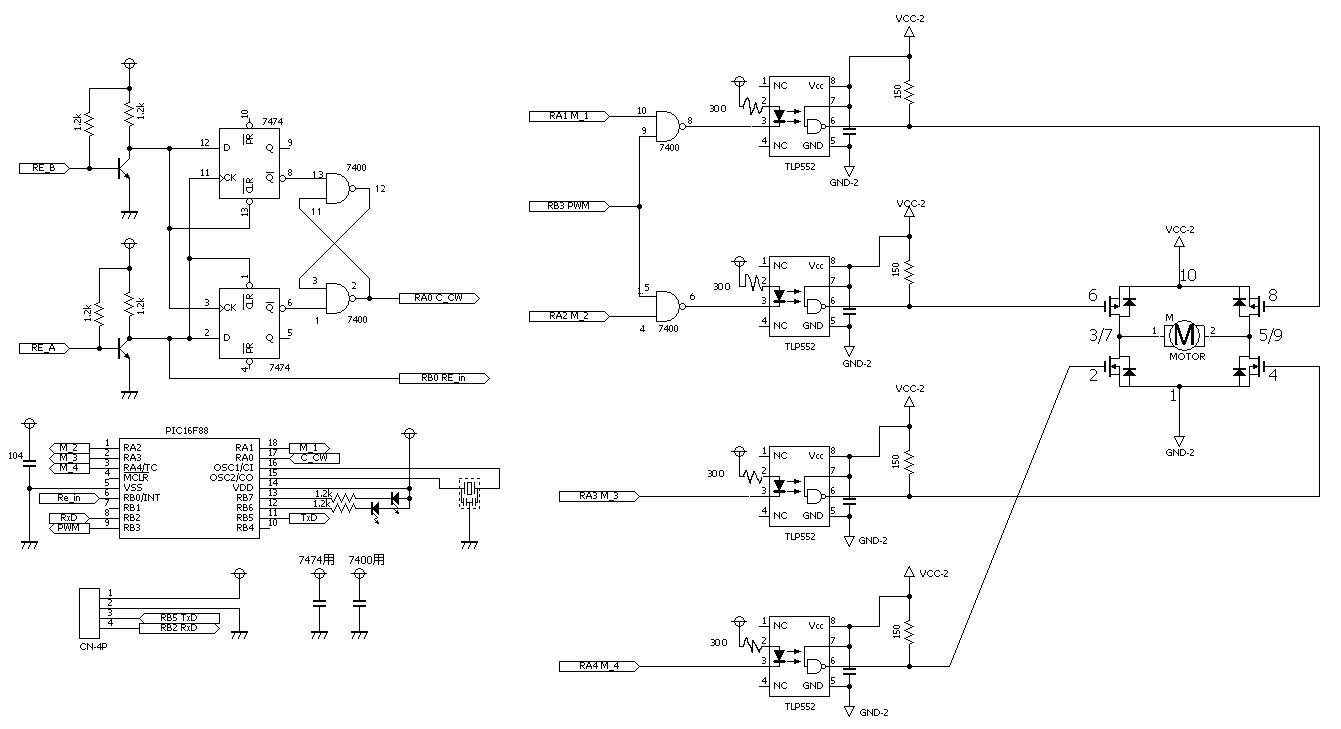
Fig.2:MTCB夞楬恾
丂fig.3偲fig.4偼PIC16F88偑弌椡偡傞PWM怣崋傪僆僔儘僗僐乕僾偱寁應偟偨傕偺偱偁傞丅偙偙偱偼丄PIC16F88偺9pin傪寁應偟偨丅Duty斾偑50亾偺恾傪fig.3偵帵偟丄75亾偺恾傪fig.4偵帵偟偨丅PWM怣崋偑弌椡偝傟丄Duty斾偑惓偟偔寢壥偵斀塮偝傟偰偄傞偙偲傪妋擣偟偨丅
 丂丂丂丂丂
丂丂丂丂丂

丂丂丂 fig.3 PWM怣崋(50%) 丂丂丂丂丂丂丂丂丂丂丂丂丂fig.4 PWM怣崋(75%)
丂fig.5乣fig.8偼丄NAND慺巕7400偑斀揮弌椡偟偰偄傞條巕傪僆僔儘僗僐乕僾偱寁應偟偨傕偺偱偁傞丅偙偙偱偼丄7400偺6pin偲8pin傪寁應偟偨丅偦傟偧傟丄fig.5偼6pin偺Duty斾50亾丄fig.6偼6pin偺Duty斾75亾丄fig.7偼8pin偺Duty斾50亾丄fig.8偼8pin偺Duty斾75亾偺恾偱偁傞丅Duty斾50亾偺恾偱偼傢偐傝偵偔偄偑丄Duty斾75亾偺恾偐傜Duty斾偑25亾偵斀揮偟偰偄傞偙偲偐傜丄7400偺6pin丄8pin偱偼怣崋偺斀揮偑惓偟偔峴傢傟偨偙偲傪妋擣偟偨丅
 丂丂丂丂丂
丂丂丂丂丂

丂fig.5 6pinPWM斀揮怣崋(50%) 丂丂丂丂丂丂丂丂 fig.6 6pinPWM斀揮怣崋(75%)
 丂丂丂丂丂
丂丂丂丂丂

丂 fig.7 8pinPWM斀揮怣崋(50%) 丂丂丂丂丂丂丂丂fig.8 8pinPWM斀揮怣崋(75%)
丂fig.9偲fig.10偼儌乕僞僪儔僀僶MP4212偑儌乕僞偵捈愙憲傞怣崋傪僆僔儘僗僐乕僾偱寁應偟偨傕偺偱偁傞丅偙偙偱偼丄MP4212偺3pin(7pin)偺Duty斾50亾傪fig.9偵帵偟丄Duty75亾傪fig.10偵帵偟偨丅廃婜偑峀偡偓偰傛偔傢偐傜側偄偑丄怣崋偑偱偰偄傞偙偲偼妋擣偱偒偨丅
 丂丂丂丂丂
丂丂丂丂丂

丂 fig.9 儌乕僞乕傊偺怣崋(50%) 丂丂丂丂丂丂丂丂 fig.10 儌乕僞乕傊偺怣崋(75%)
丂埲忋偺僨乕僞偲丄儌乕僞偑幚嵺偵摦偒丄庛偄夞揮偲嫮偄夞揮傪孞傝曉偟偨偙偲偐傜丄偙偺帋尡偼惉岟偱偁傞偲偄偊傞丅傑偨丄偙偺帋尡偐傜丄儌乕僞乕偵傛偭偰夞揮偺偟傗偡偝偑堘偆偙偲偑敾柧偟偨丅
3.3.4 摦嶌帋尡3
-
椉曽偲傕惓忢偵摦嶌偟偰偄傞偙偲傪妋擣偱偒偨丅
偨偩丄崱擭搙偺儌乕僞惂屼儃乕僪偼丄彮偟擬偔側偭偰偟傑偆偙偲偑偁傞丅
撪梕偼帋尡寢壥傪嶲徠丅
3.4 挻壒攇僙儞僒儃乕僪
3.4.1 晹昳偺僠僃僢僋
- 敪岝僟僀僆乕僪偺岦偒偑媡偵側偭偰偄偨偨傔丄栠偟偨丅偦傟埲奜偼摿偵栤戣側偐偭偨丅
3.4.2 摫捠僠僃僢僋
- 僔儑乕僩売強偑懡偐偭偨偨傔丄廋惓傪偟偨丅
丂3.4.3摦嶌帋尡
挻壒攇僙儞僒偵傛傞應掕傪峴偭偨丅6夞偺應掕偱岆嵎3亾埲撪偺偲偒偵應掕壜擻偲敾抐偡傞偺偱丄傂偲偮偺嫍棧偵偮偒6夞應掕傪峴偭偨丅偆傑偔偄偐側偄偲偒偼壜曄掞峈偱挷愡傪偟偰20cm埲壓偺嫍棧偱偺應掕偱抣偑20偵側傞傛偆偵偟偨丅 帋尡偺寢壥傪埲壓偺昞偵帵偡丅

fig.11 恊婡應掕寢壥

fig.12 崱擭搙嶌惉偺巕婡應掕寢壥

fig.13 慜擭搙偺巕婡應掕寢壥1

fig.14 慜擭搙偺巕婡應掕寢壥2
丂恊婡偵偮偄偰偼岆嵎偑堦斣戝偒偄偲偙傠偱傕2%偩偭偨偨傔丄栚昗偺岆嵎偺斖埻撪偱偁偭偨丅
傛偭偰丄帋尡偼崌奿偱偁傞丅偨偩丄嫍棧偑墦偄偲偙傠偱偼僄儔乕偵側傞偙偲偑偁傞偺偱丄
幚嵺偵摦偐偡応崌偵偼峫偊傞昁梫偑偁傞丅崱擭搙嶌惉偟偨巕婡偼丄偙偺寢壥偱偼晄崌奿偱偁傞丅
傛偭偰杮斣傑偱廋暅傪帋傒傞偑丄傕偟廋暅偱偒側偐偭偨応崌偼嶌傝捈偡偐丄崱擭搙偺傕偺偼巊梡偣偢
嶐擭搙偺傕偺傪巊梡偡傞丅