目次
1.目的
2.全体図
3.解体手順
5.総括
本ドキュメントは、MIRS1202の解体手順について記したドキュメントである。
このドキュメントを作成することで、MIRS1202の工夫,改造を調べ、
MIRSの構造の理解を深める。
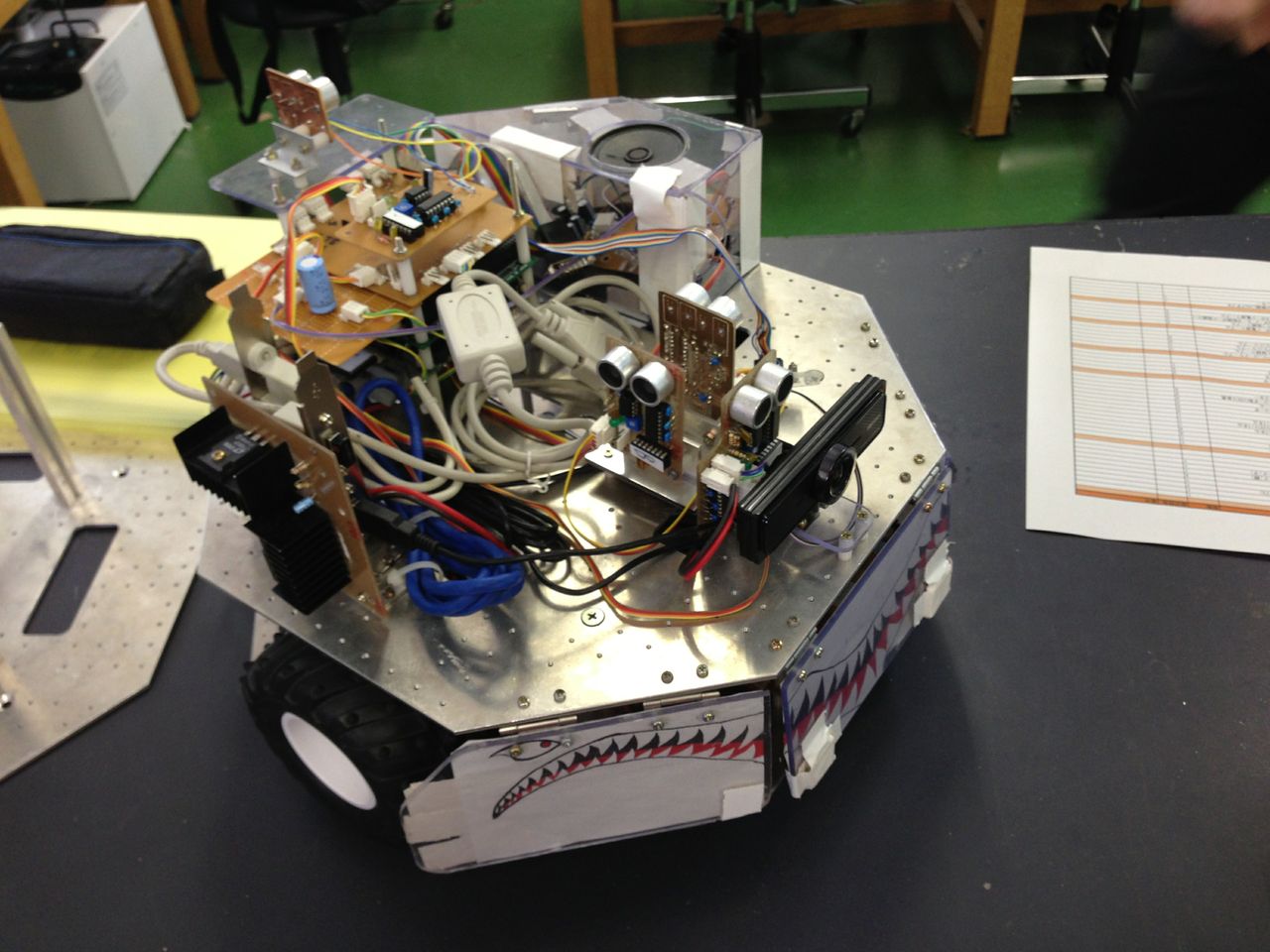
写真1 MIRS1202全体図
MIRS1202の一番の特徴はスピーカーである。MIRS1202は音声実況システムを実現させるために、標準機にはないスピーカーを搭載している。また、基盤の配置が標準機と大きく異なっている。
上下シャーシの大きさは標準機と同じだった。
3.1スピーカーBOXの取り外し
まず初めにスピーカーBOXを取り外した。
スピーカーBOXは、上段シャーシからはみ出さず、且つ超音波センサの邪魔にならないよう、形と位置が工夫されていた。
しかし、アクリル板をガムテープでつなげた粗末な作りだったので、とても脆かった。
また基盤がBOX内で固定されておらず、スピーカーBOX自体はガムテープによってMIRS本体に固定されていた。
また、基盤とシャーシの間にスポンジが入っていた。これは基盤のショートを防ぐためと考えられる。

写真2 スピーカーBOX
MIRS1202 スピーカーボックス詳細設計書
MIRS1202 音声実況システム詳細設計
3.2バンパーの取り外し
蝶番,ネジ,ナットにより本体に固定されていた。しかし、ナットがところどころなく、ネジも緩くしめられていた。
おそらくタッチセンサを反応しやすくするための工夫だろう。
また、正面のバンパーには重りが取り付けられていた。
これも、タッチセンサを反応しやすくするための工夫だと考えられる。
管理台帳にバンパーに関する記述はなかった。よってこれらの工夫は試行錯誤の結果だと考えられる。

写真3 バンパー
3.3上下シャーシの分離
コード類と円柱部分のネジを外して、上下のシャーシを分離させた。

写真4 上段シャーシ

写真5 下段シャーシ
3.4ドーターボードの取り外し
標準機と違い、ラックを使用せずネジとスペーサーのみで固定されていた。また、ドーターボード類が標準機より後ろに取り付けられていた。
ドーターボードは一枚しかなく、標準機と比較し端子の数が多いので、2つのドーターボードを1つにまとめたものと考えられる。
横にスピーカー用の基盤が取り付けられていた。
また、8pinフラットケーブルがホットボンドにより補強されていた。
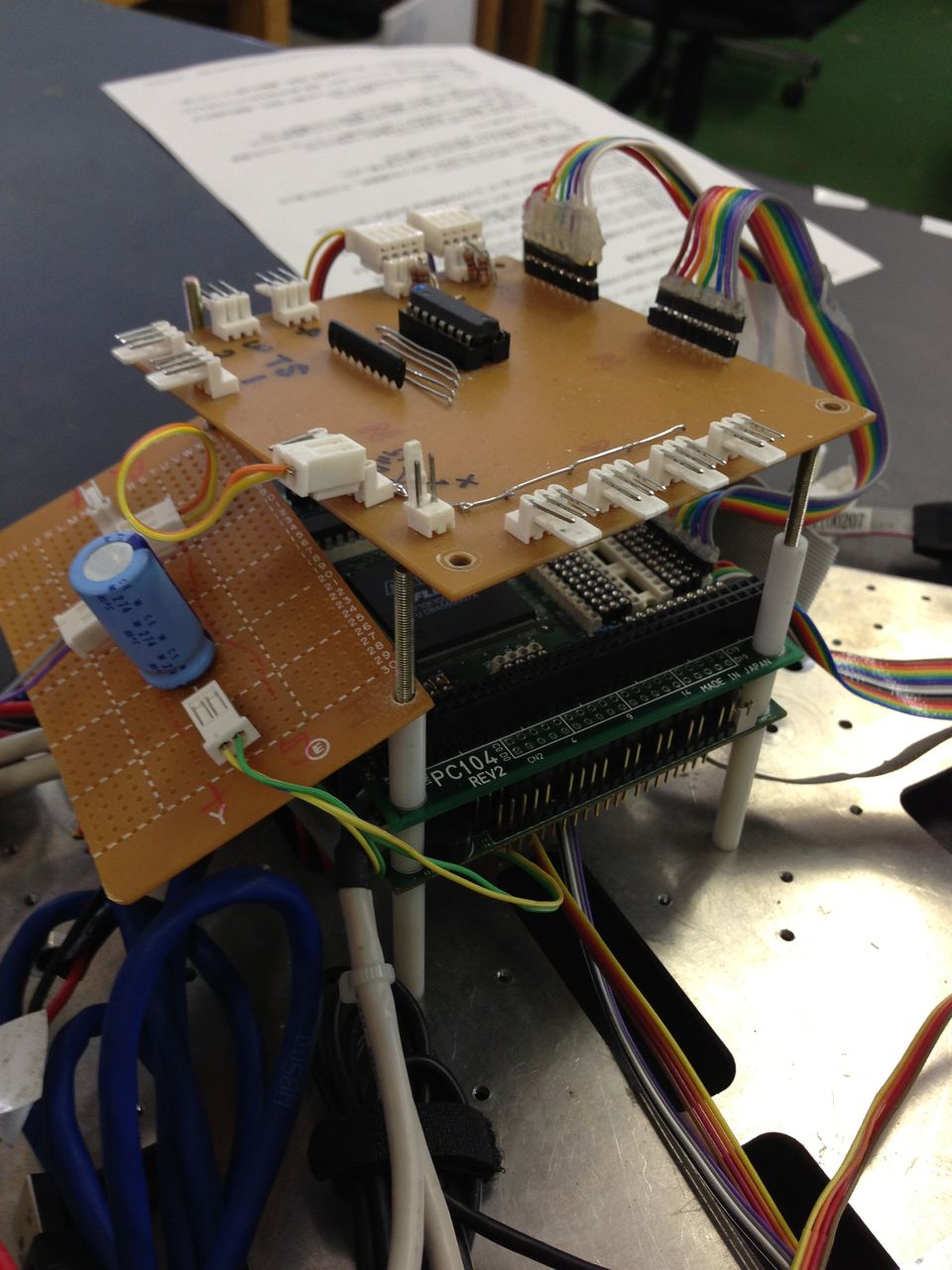
写真6 ドーターボード
MIRS1202 音声実況システム詳細設計
3.5 FPGA,CPUボードの取り外し
USBポートが2つ増設されていた。取り付けパネルはUSB取り付けパネルが2つになっていて、それ以外は外されていた。
VGA取り付けパネルについていたポートはケーブルごとに分けられていて、PS/2LAN取り付けパネルのものはケーブルすらついていなかった。
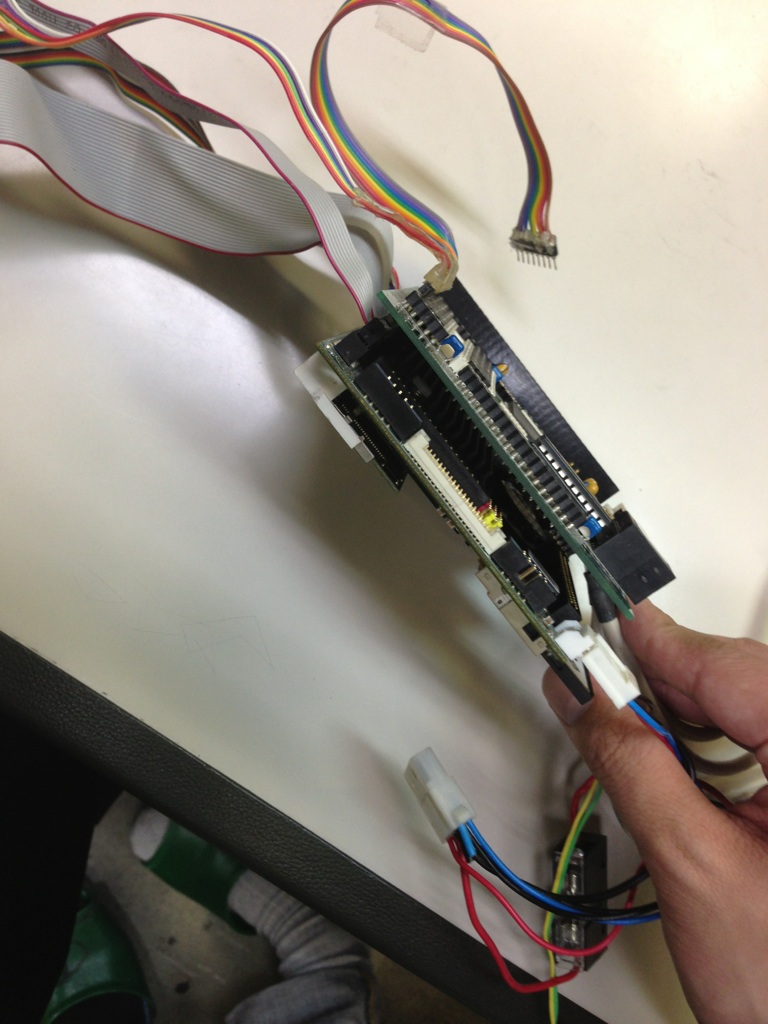
写真7 FPGA,CPUボード
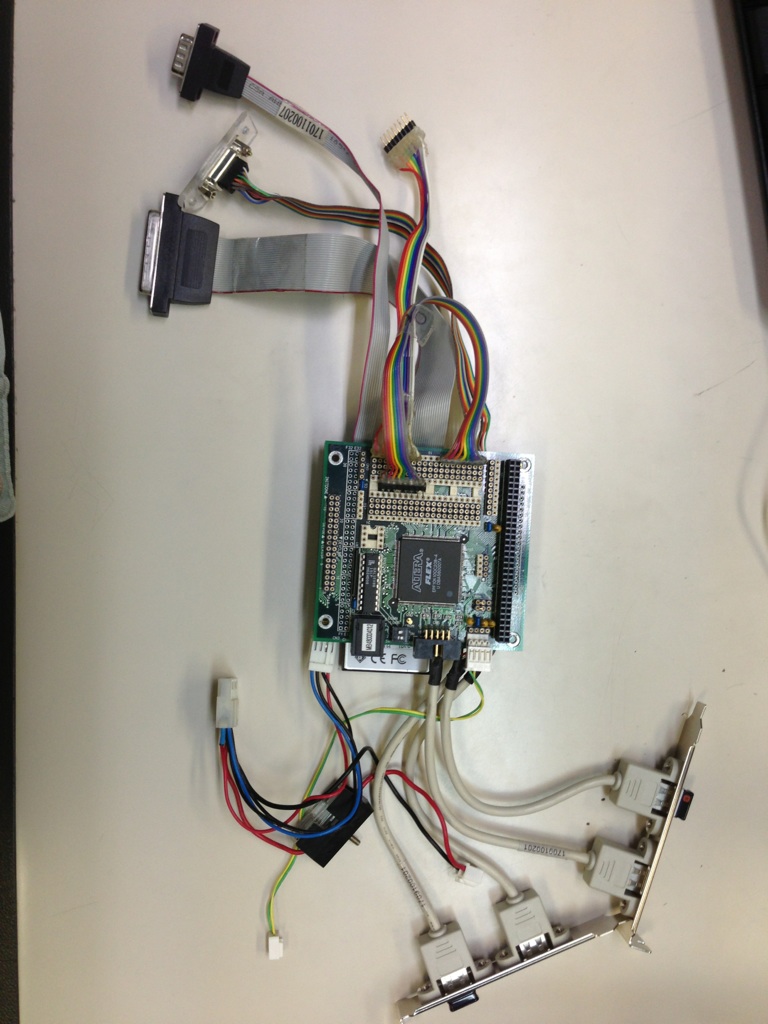
写真8 FPGA,CPUボード2
3.6 超音波センサの取り外し
超音波センサは4つ取り付けられていた。内一つは発振器と制御ボードが分離していたが、理由は記載されていなかった。
写真10に示した3つの超音波センサは機体の前方に、発振器と制御ボードが分離したものは後方の高い位置に取り付けられていた。前方の3つは1つの金属板に固定されていた。
また、標準機では前方を向いているものが2つ、左右を向いているものが1つずつだった。しかし、この機体では前向き1つ、右向き1つ、左向き2つに変更されている。これは、側面を見る動作を安定させ、壁に沿ってまっすぐ走行させるためである。
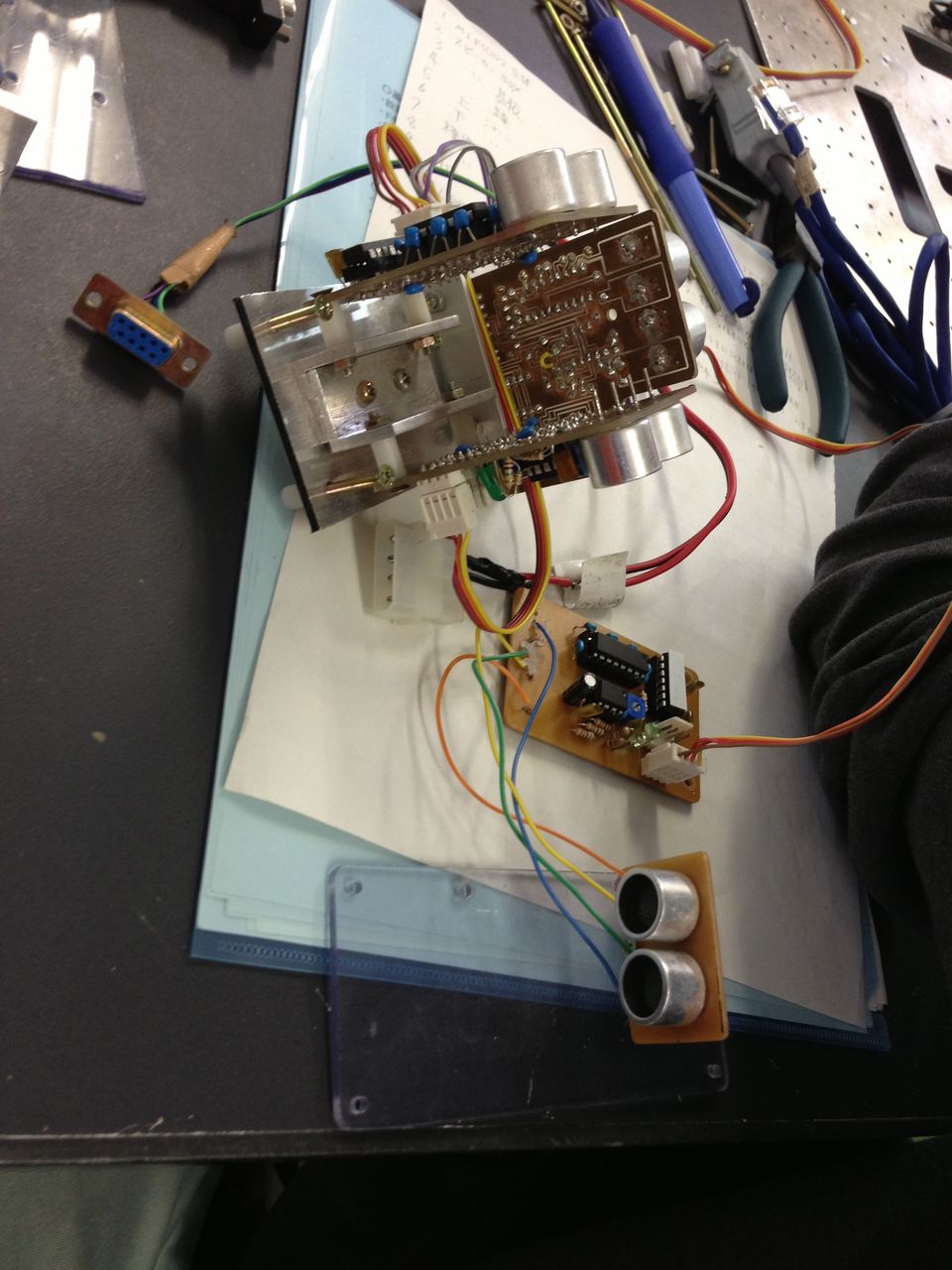
写真9 超音波センサ
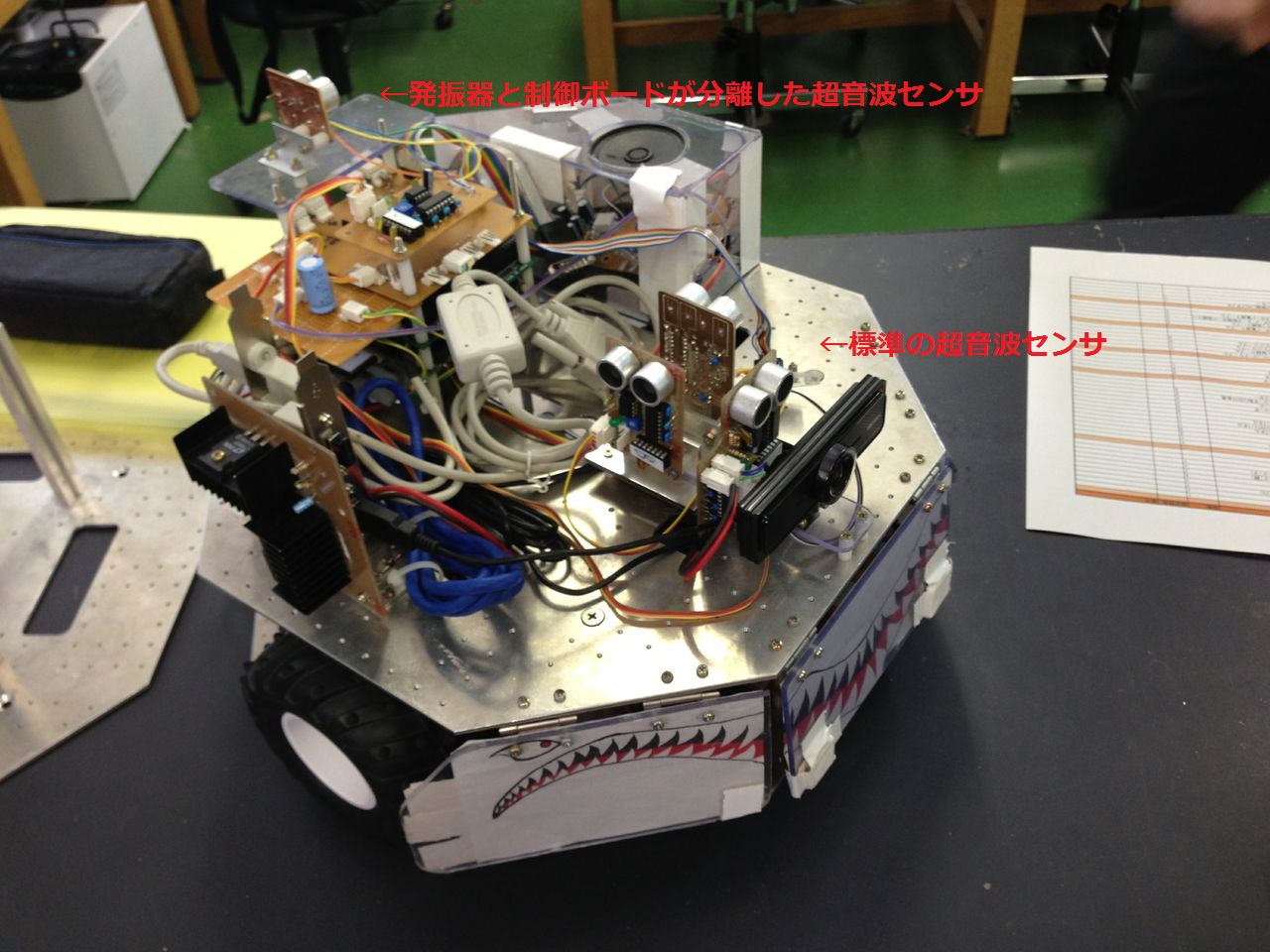
写真10 超音波センサ位置
超音波センサボード製造仕様書
MIRS1202 基板配置詳細設計書
3.7 Webカメラの取り外し
標準のWebカメラではなく、iBUFFALOのBSW20KM11BKが使われていた。
BSW20KM11BKは画素数が200万画素,撮影可能範囲が120°で標準のWebカメラに比べかなり高性能である。MIRS1202では、Webカメラを使用してロータリーを攻略するために、このカメラに変更した。
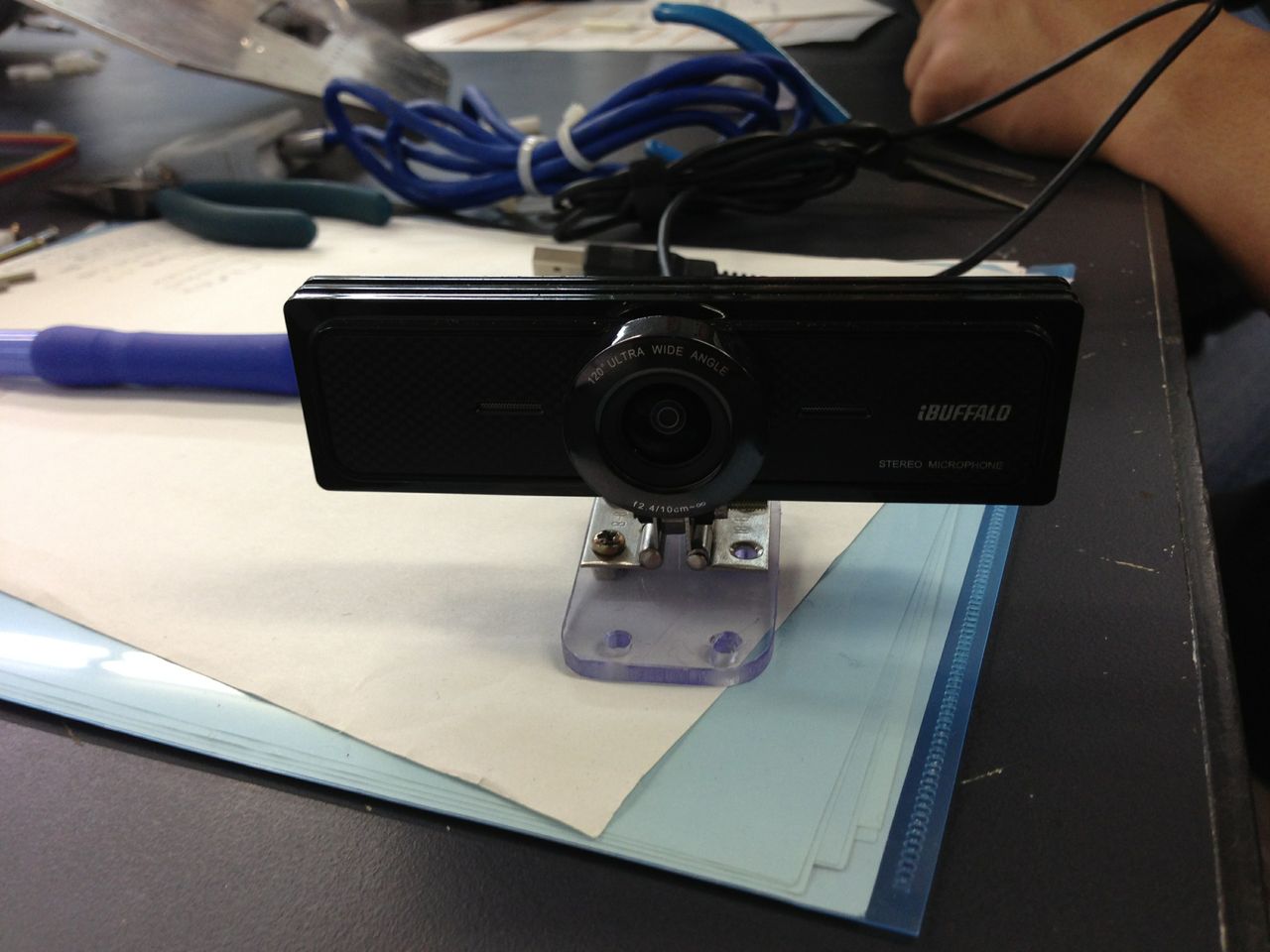
写真11 Webカメラ
MIRS1202 システム基本設計書 MIRS1202 OpenCVによる数字認識
3.8 電源ボードの取り外し
標準機では後方についていたが、この機体では右側に垂直に立てられた状態で取り付けられていた。
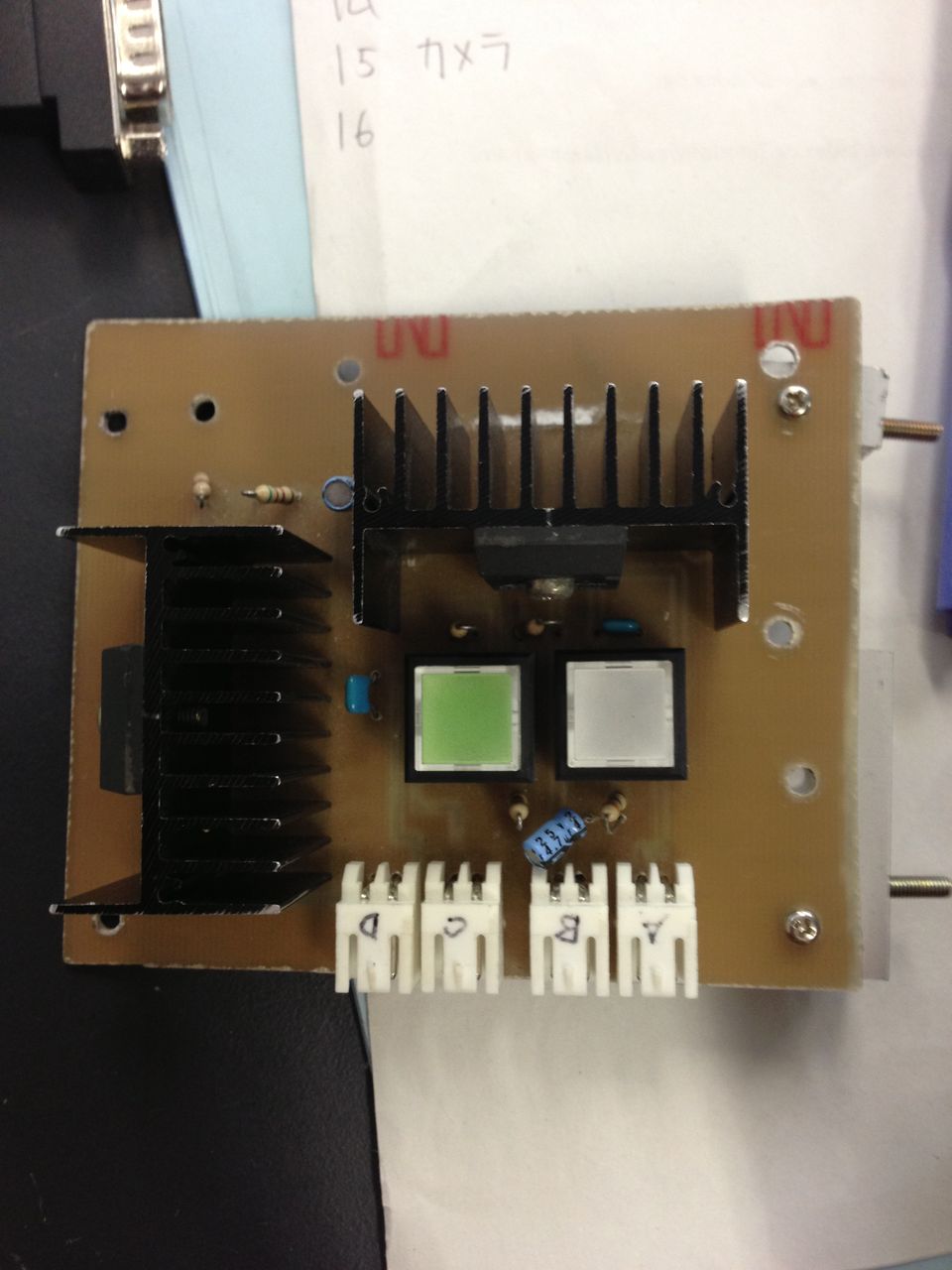
写真12 電源ボード
MIRSMG3D 組み立て手順書
3.9 モーター制御ボードの取り外し
下段シャーシの前後に1枚ずつ取り付けられているものが、下段シャーシの前側にまとめられていた。しかし、基盤は変更されていなかった。

写真13 モータ制御ボード(上部)

写真14 モーター制御ボード(側面)
MIRSMG3D 組み立て手順書
3.10 白線センサの取り外し
MIRS1202のドキュメントに白線センサに関する記述がなかったことと、標準機との比較から標準機と同じものと考えられる。
MIRSMG3D 組み立て手順書
写真15 白線センサ
3.11 ボールキャスターの取り外し
スペーサーを斜めに切ることで、外側が持ち上がるように傾いて取り付けられていた。これは、シーソー,ステップでボールキャスターが引っかからないようにするためだろう。
しかし、設計図面通りにスペーサーが加工されておらず、設計図面より傾いていない。

写真16 ボールキャスター
MIRS1202 ボールキャスター詳細設計書
3.12 タイヤの取り外し
標準機と同じことを確認した。
MIRSMG3D 組み立て手順書

写真17 タイヤ
3.13 モーター,ロータリーエンコーダの取り外し
標準機と同じことを確認した。
MIRSMG3D 組み立て手順書

写真18 モーター,ロータリーエンコーダ
MIRS1202に使われていたすべての部品の写真を以下に示す。

写真19 部品全体図