3.実現方法
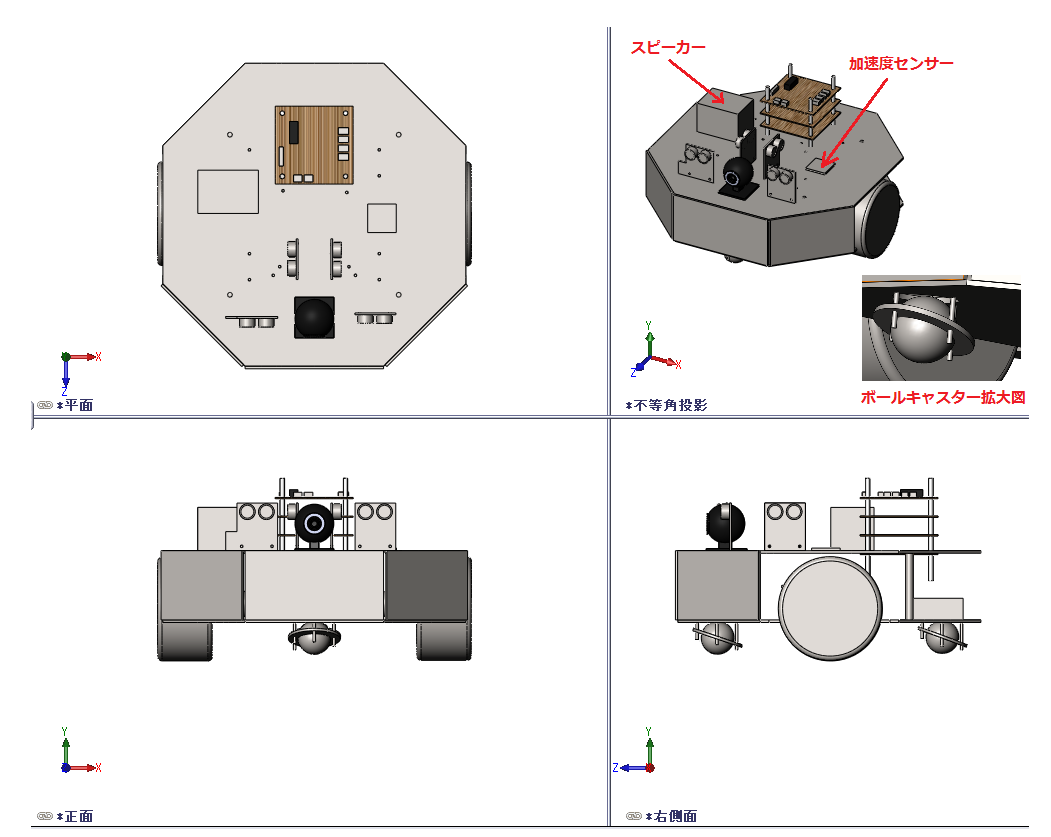
メカニクス
- 前後のボールキャスターを地面と水平に取り付けるのではなく、傾斜を作り取り付けることにより、シーソー、ステップでMIRSが引っかかることのないようにする。
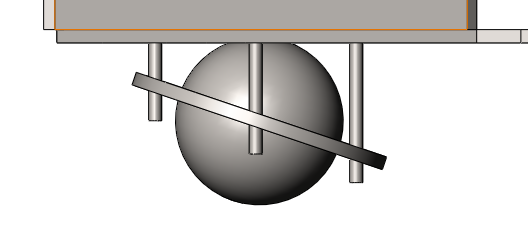
また、加速度センサを搭載することによってシーソーに乗ったことを認識し、速さの調節を行う。
エレクトロニクス
- LEDでの競技中のMIRSの状況表示では自分たちにはわかるが競技会を見に来ている観客たちにはミルスが今何をしているのかがわからない。
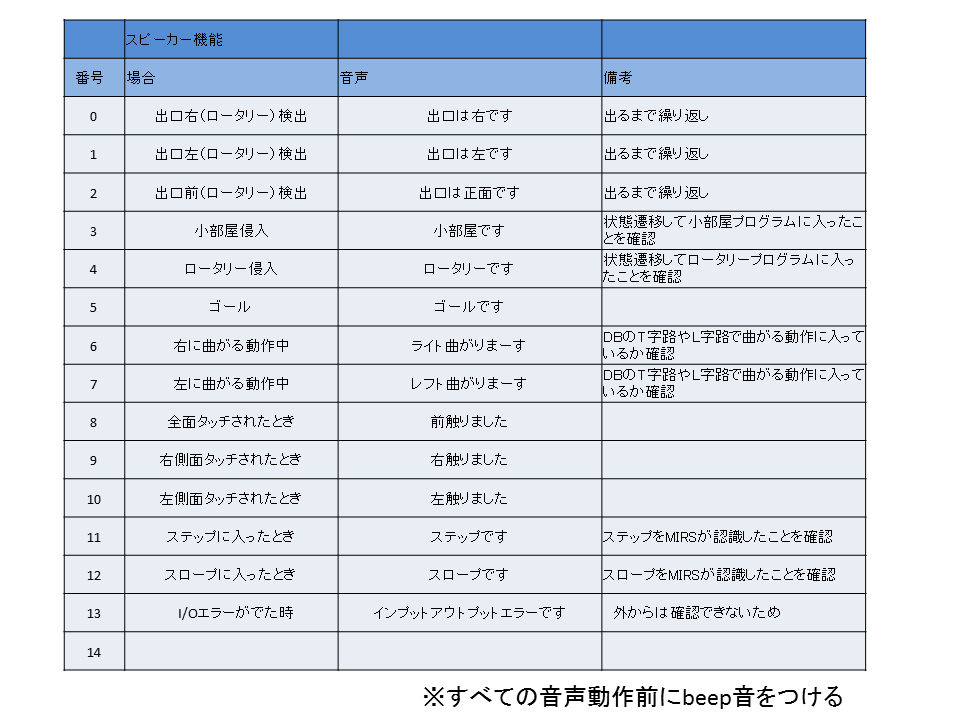
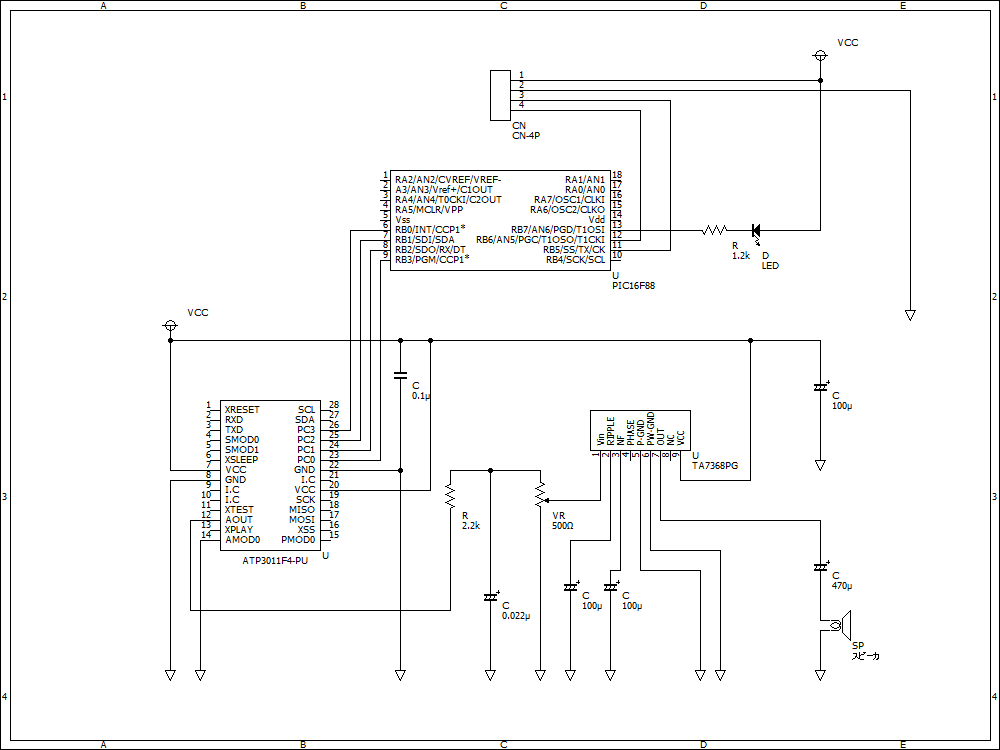
そこでMIRS1202ではスピーカーを設け「音」又は「音声」でミルスの状況が分かるようにする。
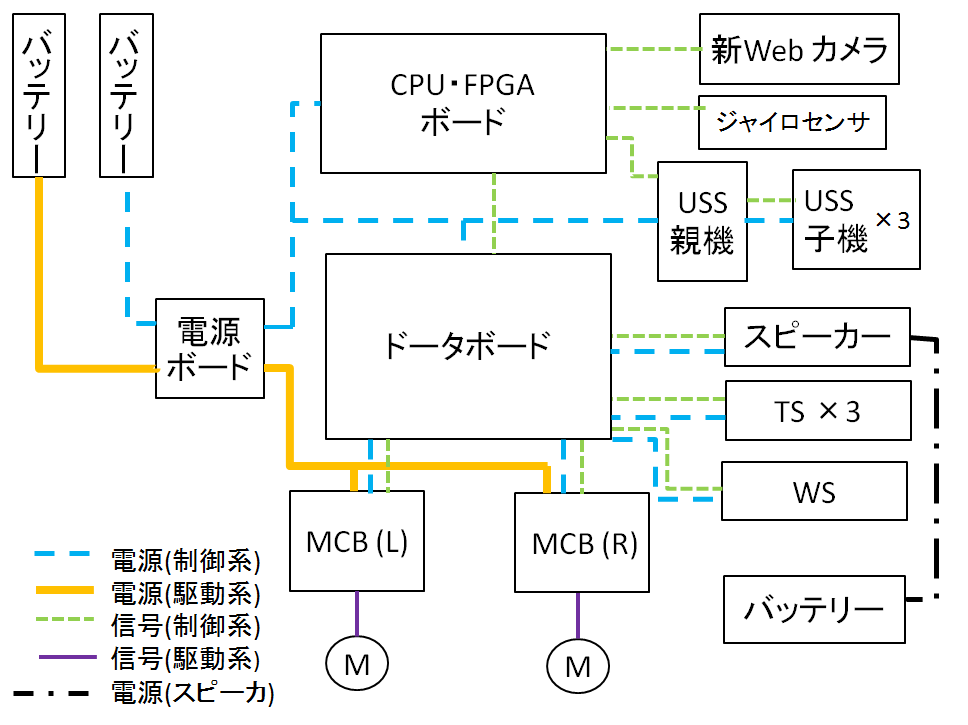
スピーカ制御はDBからのシリアル通信で行う。
制御信号でLSIにあらかじめセットしている音声を流す。
| 商品名 | 型番 | 価格 | 送料 | 個数 |
|---|---|---|---|---|
| AquesTalk pico | ATP3011F4-PU | ¥850 | ¥500 | 1個 |
| 丸ピンICソケット(28P)[300mil] | ICソケット(28P) | ¥70 | ¥500 | 1個 |
| TA7368使用小型アンプキット | ¥300 | ¥500 | 1個 | |
| ダイナミックスピーカー[8Ω56mmΦ] | ¥100 | ¥500 | 1個 | |
| コンデンサ | 0.1μF | ¥100 | ¥500 | 1袋 |
| コンデンサ | 0.02μF | ¥100 | ¥500 | 1袋 |
| 抵抗 | 2kΩ | ¥100 | ¥500 | 1袋 |
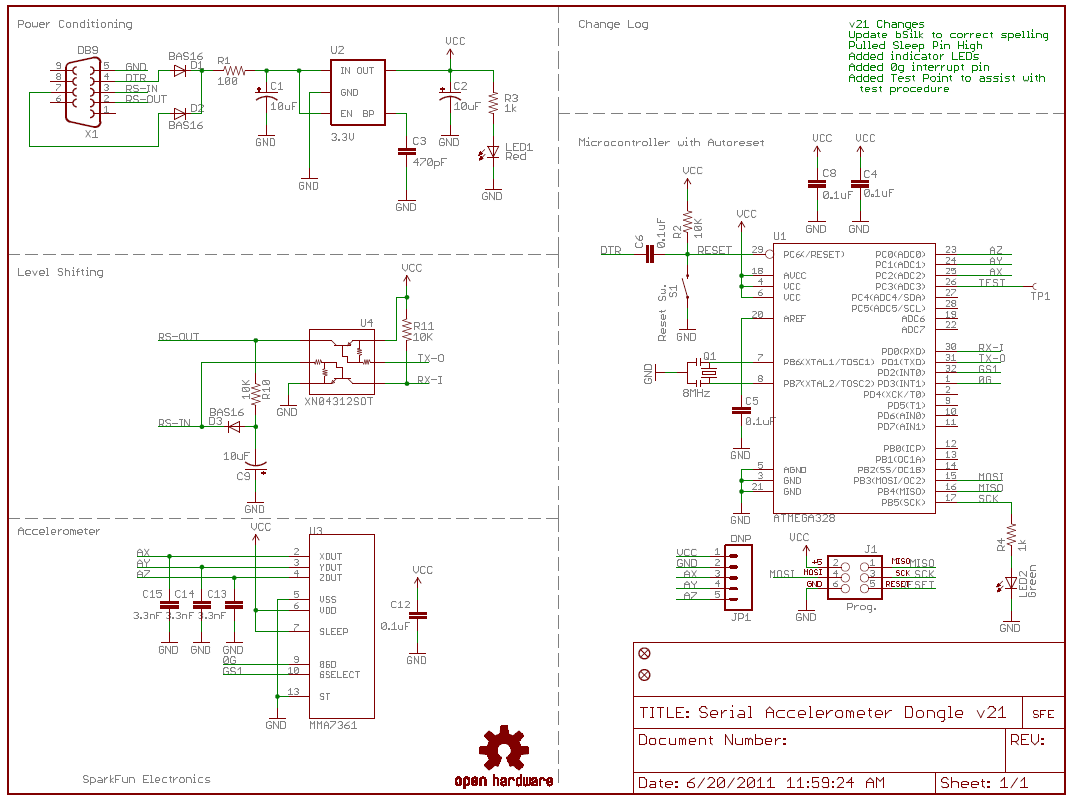
- 三軸加速度センサを用いてMIRS本体の角度の変化を読み取り、シーソーにのったことを判断する。
| 商品名 | 型番 | 価格 | 送料 | 個数 |
|---|---|---|---|---|
| MMA7361搭載三軸加速度センサモジュール(シリアル通信) | SFE-SEN-10537 | ¥ 2,995 | ¥180 | 1個 |
-
この加速度センサモジュールはシリアル通信を用いて9600~57600bpsの速度でリアルタイムにASCIIコードで出力させることができる。
-
スピーカーと加速度センサを追加するため、シリアル通信のポートが足りなくなってしまう。
USB・シリアル変換ケーブルを使用してシリアル通信可能にさせる。
| 商品名 | 型番 | 価格 | 送料 | 個数 |
|---|---|---|---|---|
| USB・シリアル変換ケーブル | US232R-10 | ¥2,730 | ¥525 | 1個 |
-
使用する変換ケーブルに使用されている変換チップはLinux対応になっているため問題なく使用できるものと思われる。
- マルチスレッド処理
ソフトウェア
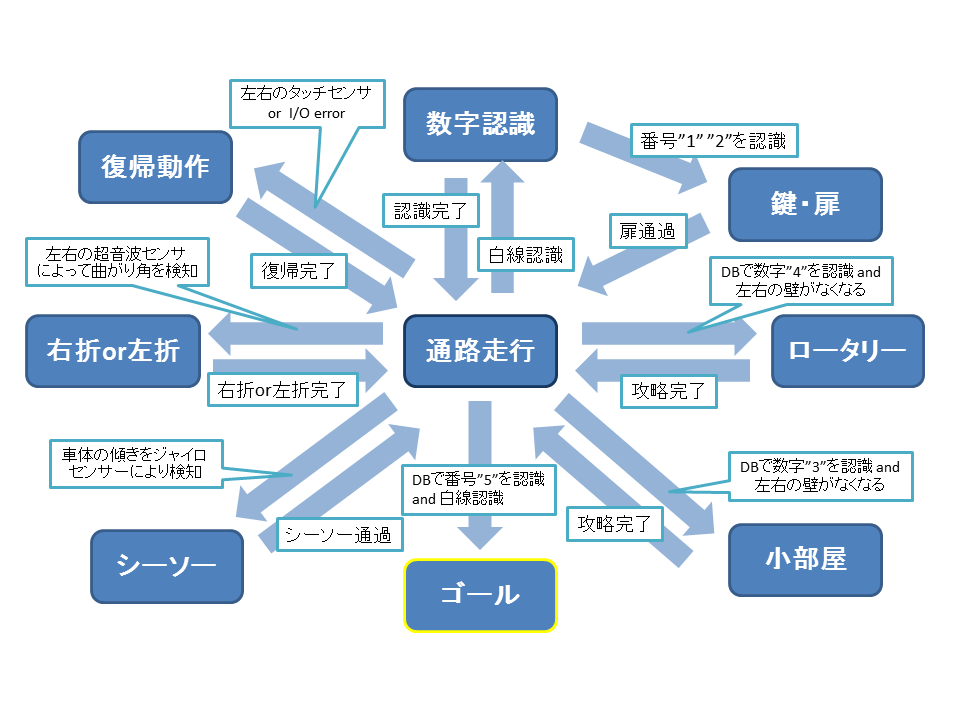
- 各仕掛けの攻略に用いるセンサーをマルチスレッドで動かす。
- ・ロータリー
広視野ウェブカメラ搭載によってMIRS本体の角度を変えなくてもロータリーの出口を見つけられるプログラムに変更する。
| 商品名 | 型番 | 価格 | 送料 | 個数 |
|---|---|---|---|---|
| マイク内蔵200万画素WEBカメラ 120度広角ガラスレンズ | BSW20KM11BK | ¥3,459 | ¥380 | 1個 |
-
・DB
正確に数字を読み込むためにMIRS0901班のプログラムを改良する。
・小部屋
画像処理にて出口が見つけられるようにプログラムを変更。
・通路走行
より早くコースを抜けられるようにプログラムを変更。超音波センサで壁との距離を測定しながら通路を走る。
・加速度センサー
MIRS本体の角度の変化を検出し、シーソーにのったことを判断するプログラムを追加。