3.1 駆動系電源ボードの製作
①駆動系スイッチボード回路図を元に、ユニバーサル基板上に実装した。回路図をFig.1に示す。
基板配線に用いるケーブルは被覆径が2mm~3mmのものか、金属線(リード線をカットしたもの)を用いた。
バッテリーおよびMCB接続の端子は、Fig2のようにターミナルブロック2ピン(縦・小)を用いた。入力側(バッテリ)を緑、出力側(MCB)を青とした。
電圧監視用ポートには Molex 2ピンのハウジングを用いた。
駆動系電源ボードの部品面をFig.2、はんだ面をFig.3に示す。
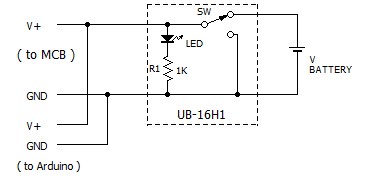
Fig.1 回路図
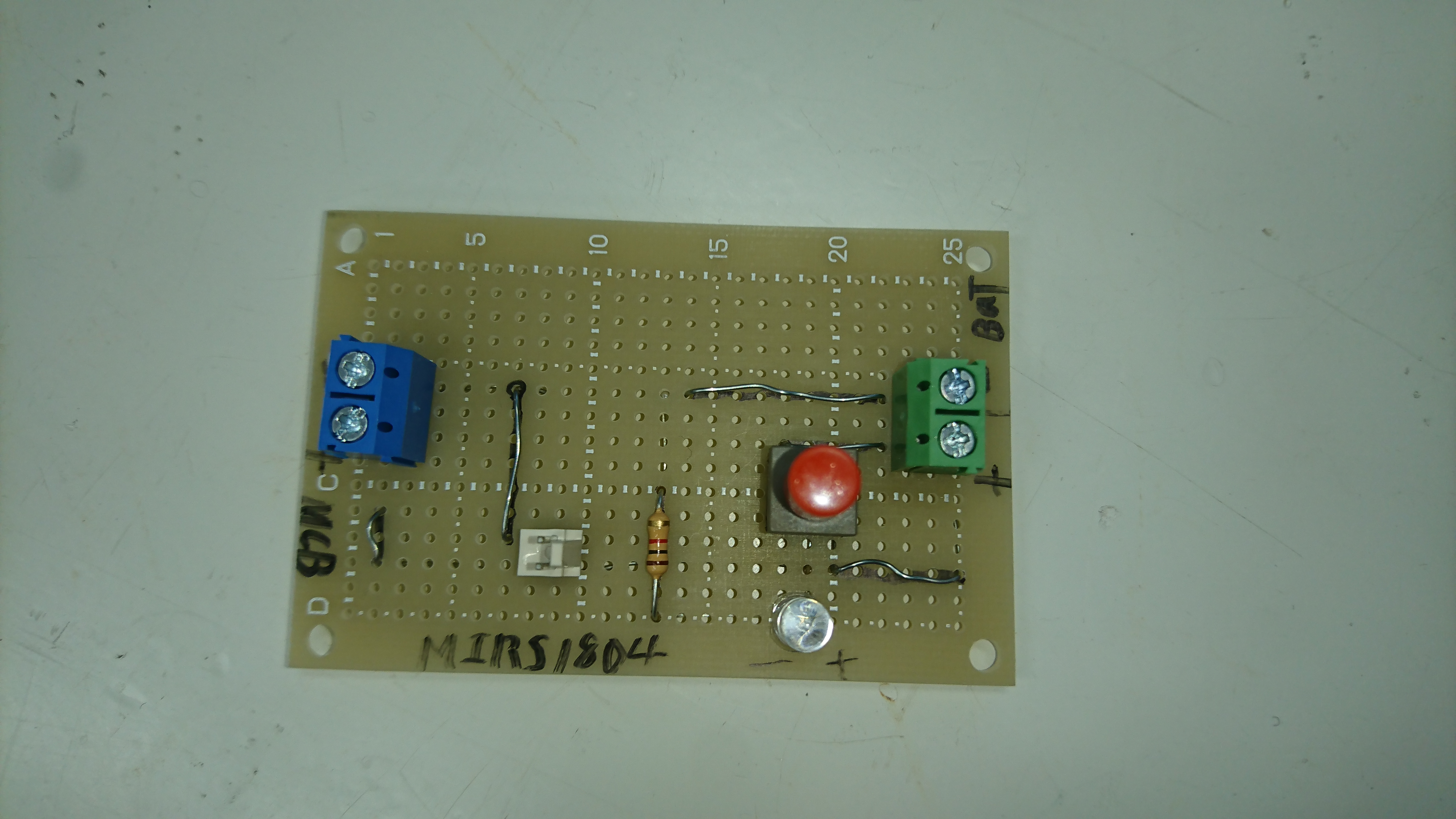
Fig.2 駆動系電源(部品面)
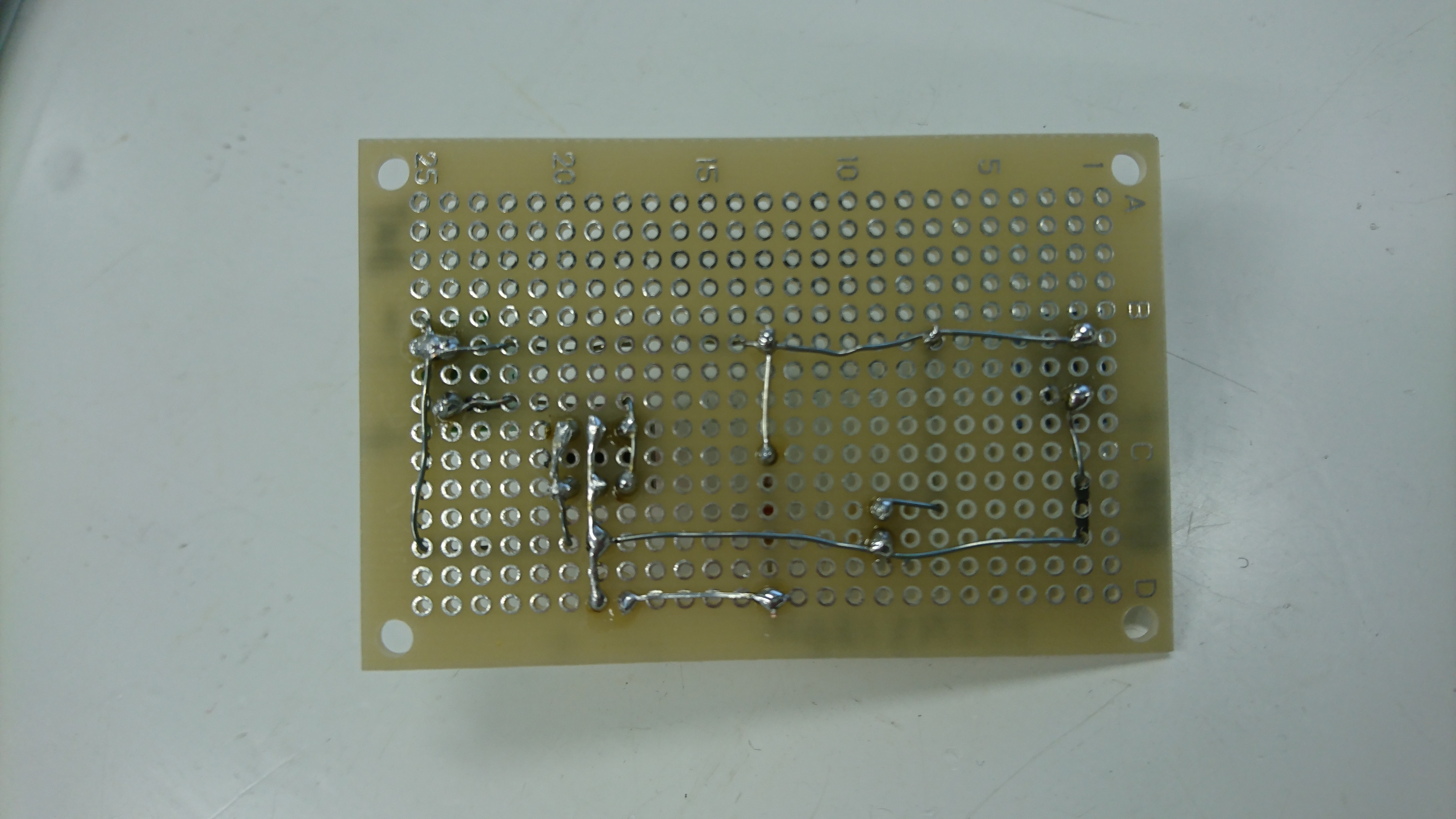
Fig.3 電源ボード(はんだ面)
テスターを用いて、はんだ付けを行ったすべての回路系に対して、導通チェックを行った。
短絡している箇所がないことが確認できた。
②接続ケーブル
被覆径が2mm~3mmの被覆線を使用して接続ケーブルを作成した。。
3.2 Arduino
①ユニバーサル基板MIRSMG4D ドキュメント管理台帳のArduino のセットアップとデバイス接続(MIRSMG4D-SYST-0003)を参考に配線およびはんだ付けを行った。このとき、ヘッダピンが傾かないように注意する必要があった。
ユニバーサル基板の部品面をFig.4、はんだ面をFig.5に示す。 Fig.4のように、左からエンコーダ入力(4ピン)、モーター出力(3ピン)、バッテリー電圧入力(2ピン)とハウジングを並べた。また、エンコーダ入力、モーター出力は下のハウジングが左モーターに関するもの、上が右のモーターに関するものとなっている。
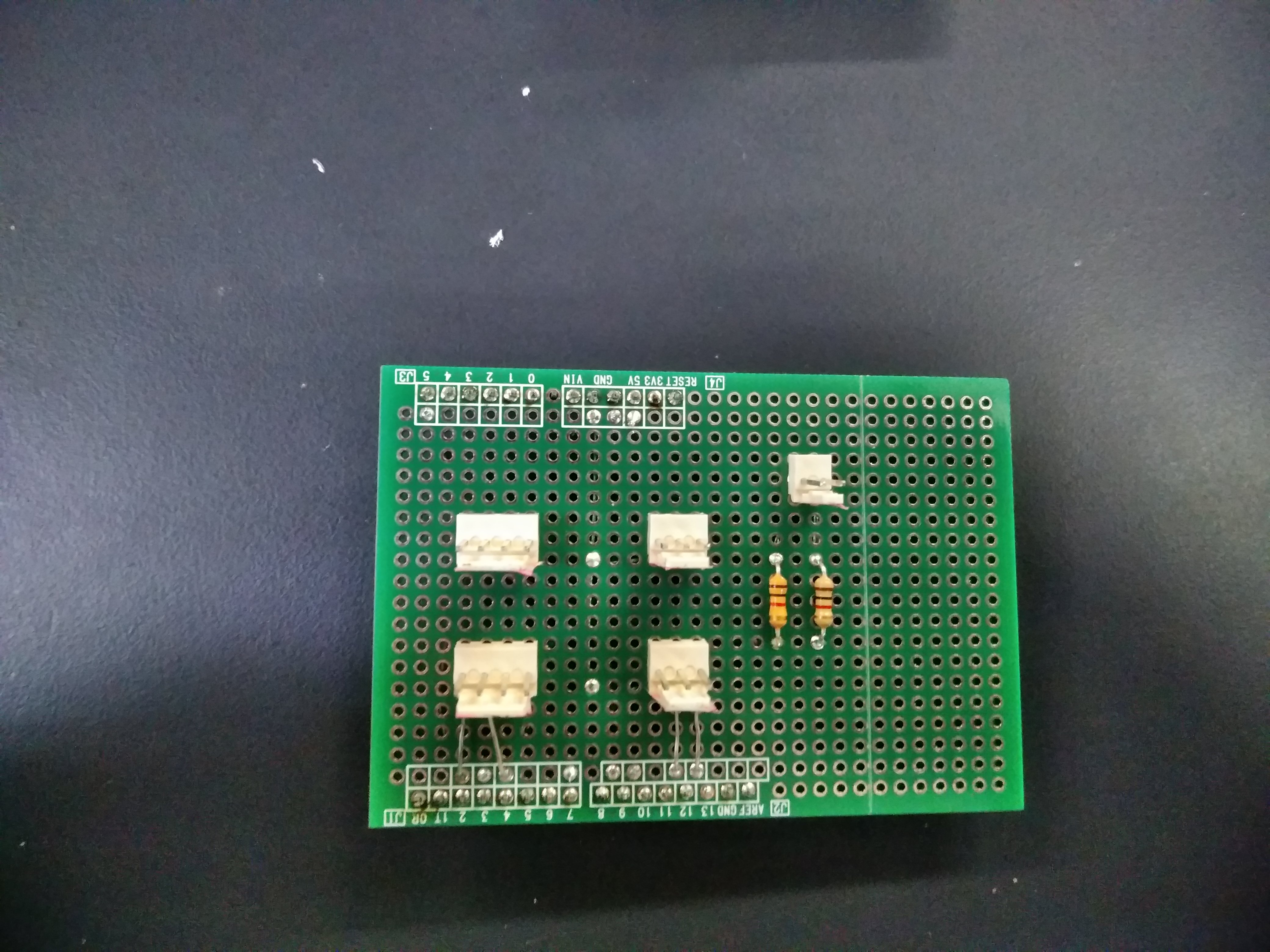
Fig.4 ユニバーサル基板(部品面)
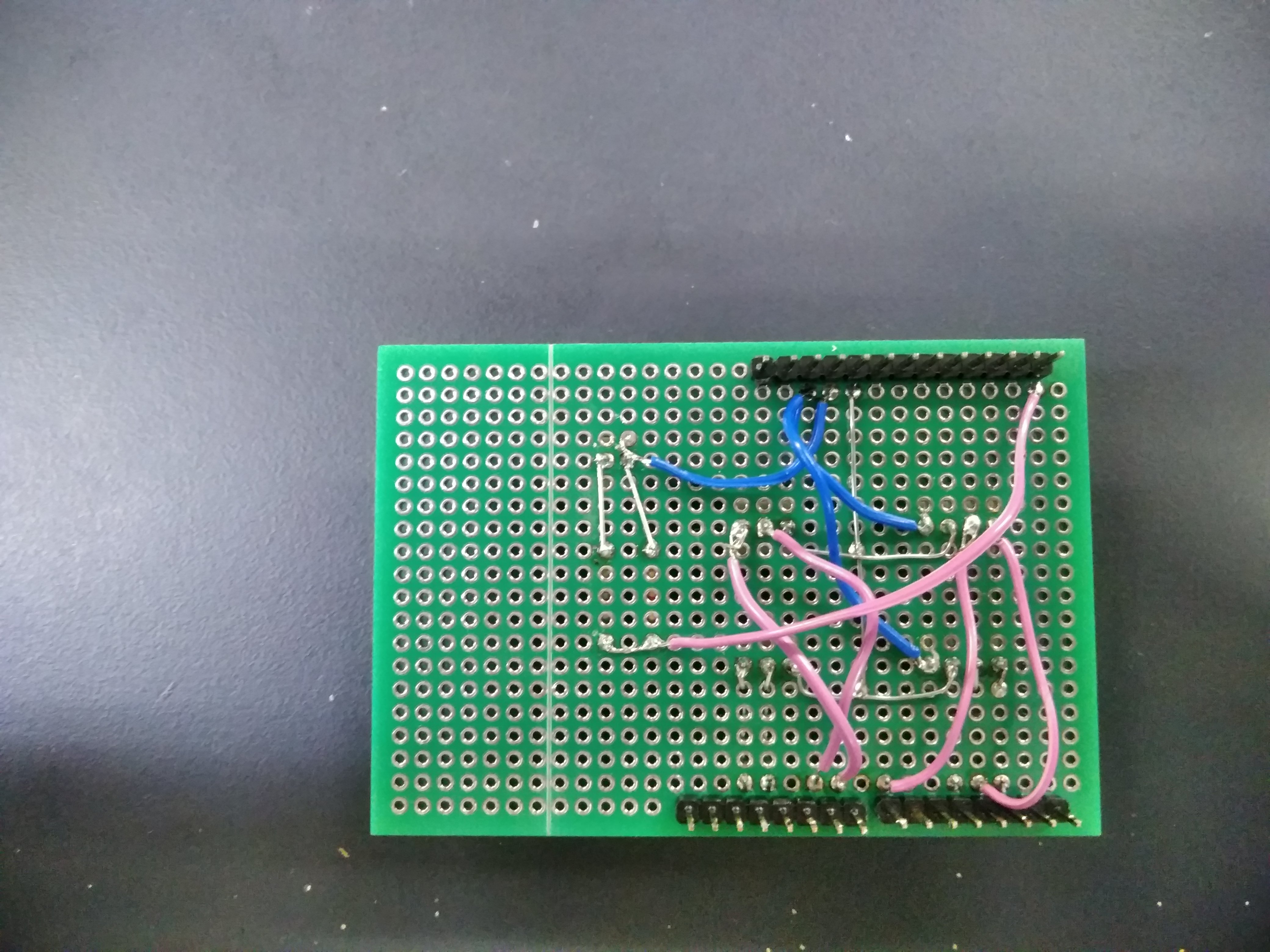
Fig.5 ユニバーサル基板(はんだ面)
テスターを用いて、はんだ付けを行ったすべての回路系に対して、導通チェックを行った。 短絡している箇所がないことが確認できた。
3.3 Raspberry Pi
①ユニバーサル基板MIRSMG4D ドキュメント管理台帳のRaspberryPi のセットアップとデバイス接続(MIRSMG4-SYST-0004)を参考にしてRaspberry Piとデバイスとの接続に使用する、ユニバーサル基板(UB-RPI02)のはんだ付けを行った。
Raspberry Pi用の20ピン×2列のピンソケット, I2Cレベル変換チップ用の8ピンICソケット(溝のあるほうが上となるようにはんだづけした), ON/OFF IOデバイス用の3個の2ピンのハウジング, 超音波センサ用の4個の4ピンハウジングをはんだ付けした。
Fig7、Fig8のようにはんだ付けを行った。

Fig.6 ユニバーサル基板(部品面)
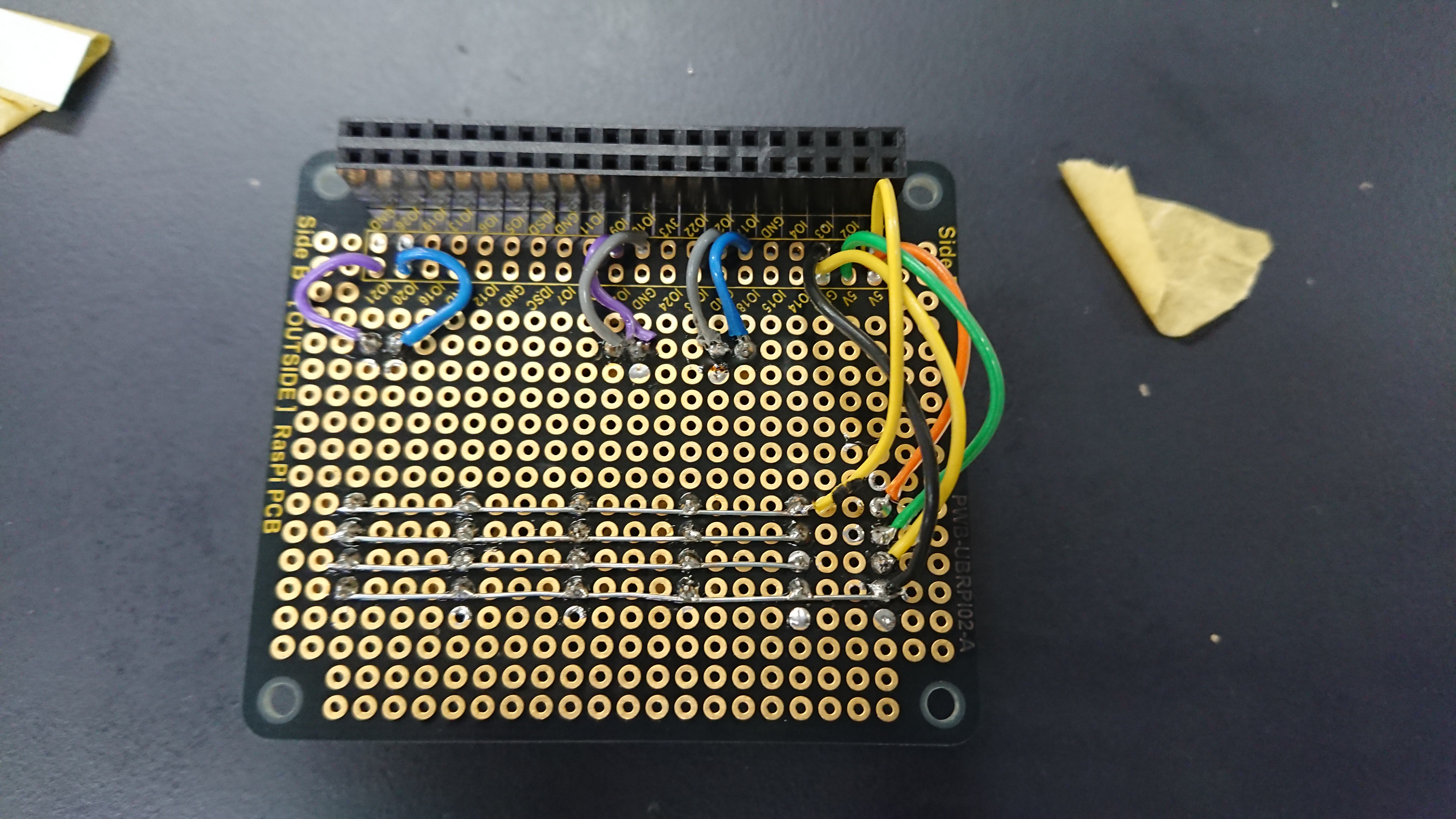
Fig.7 ユニバーサル基板(はんだ面)
テスターを用いて、はんだ付けを行ったすべての回路系に対して、導通チェックを行った。
短絡している箇所がないことが確認できた。
3.4 メカニクス
①バッテリーホルダー作り- ・制御用バッテリー
- Solidworksを用いてFig.8の3D図面を作成した。
- ・駆動用バッテリー
- Solidworksを用いてFig.10、11の3D図面を作成した。
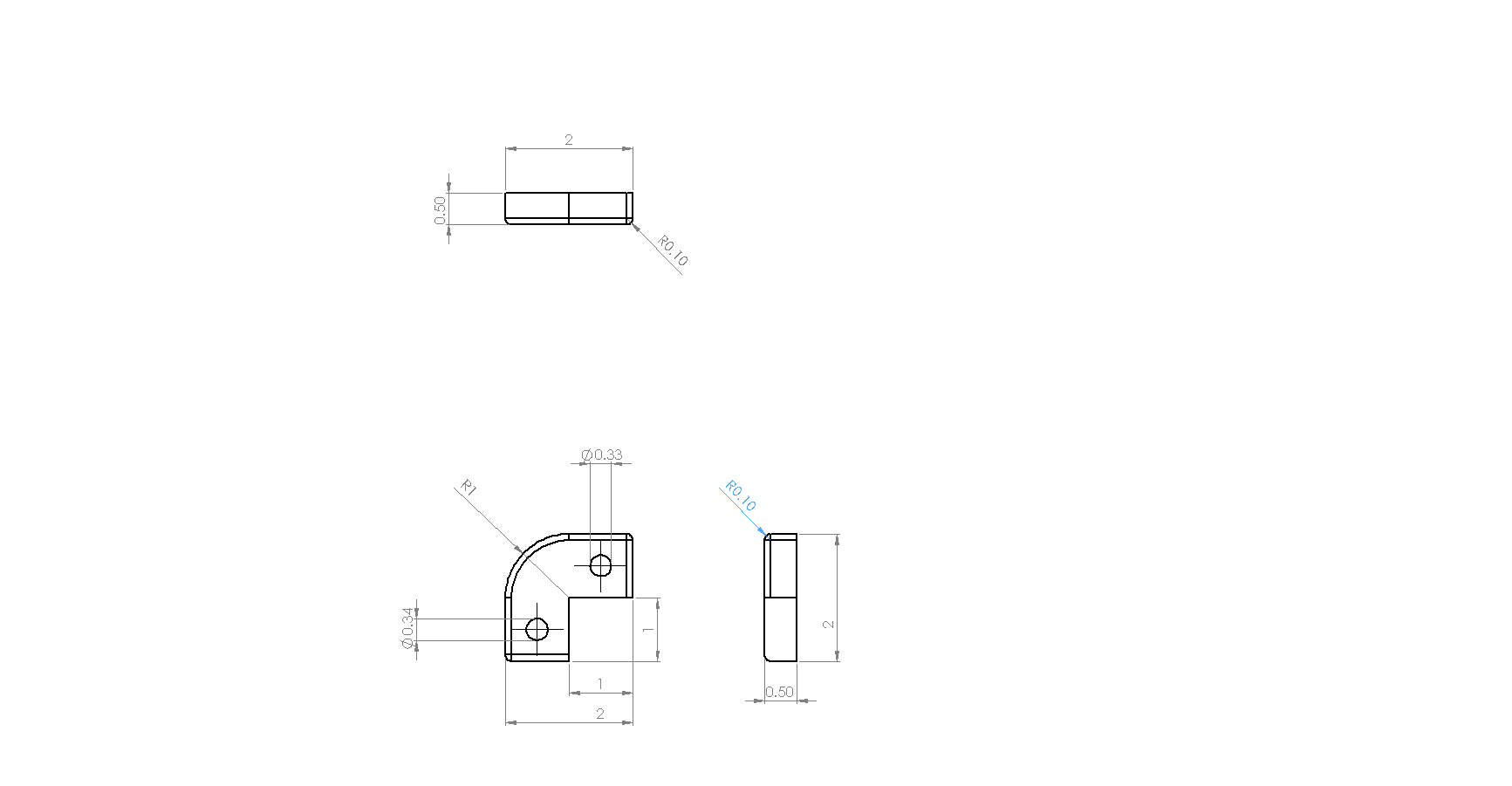
Fig.8 制御用バッテリーホルダー
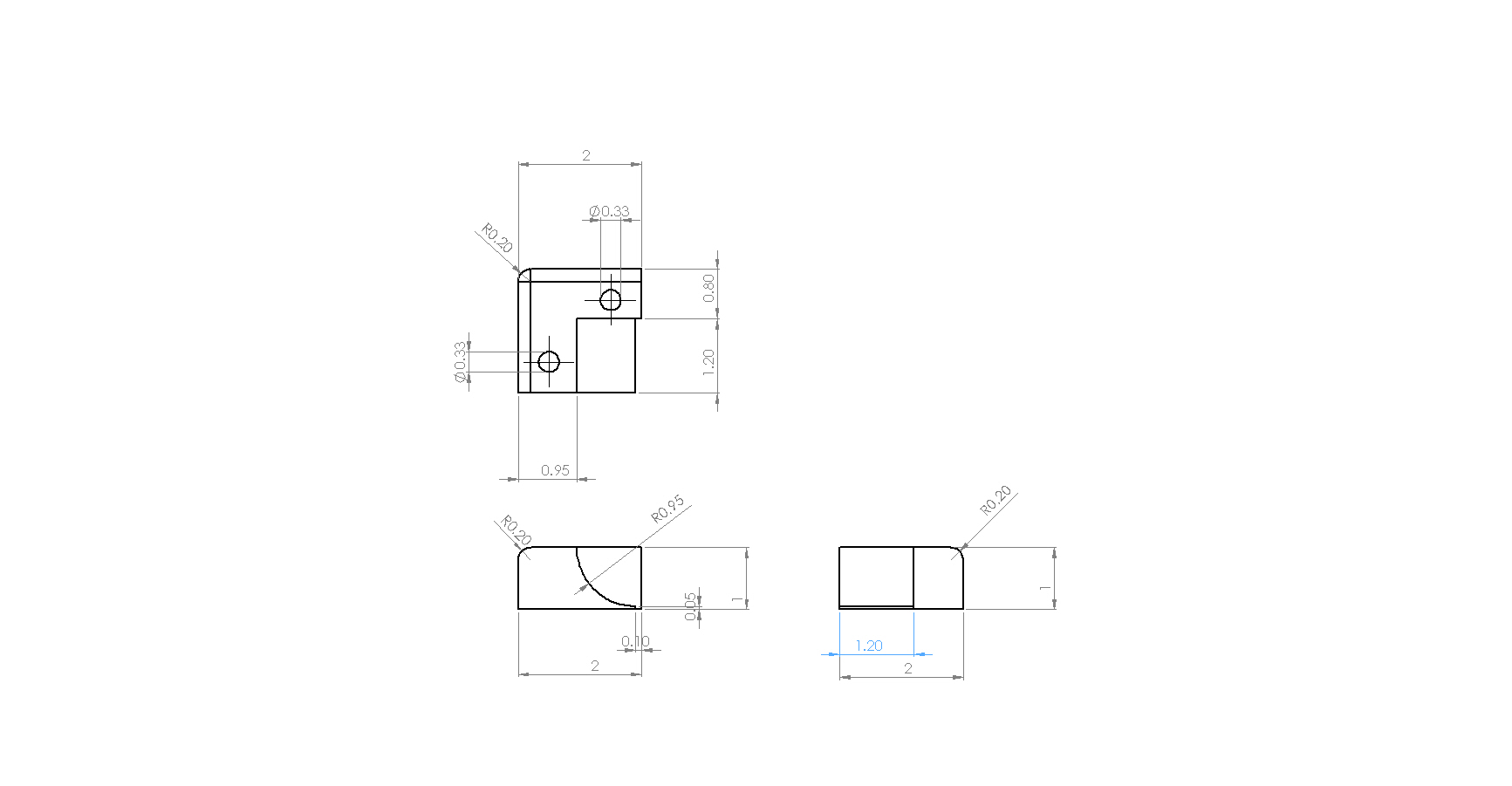
Fig.9駆動用バッテリーホルダー1
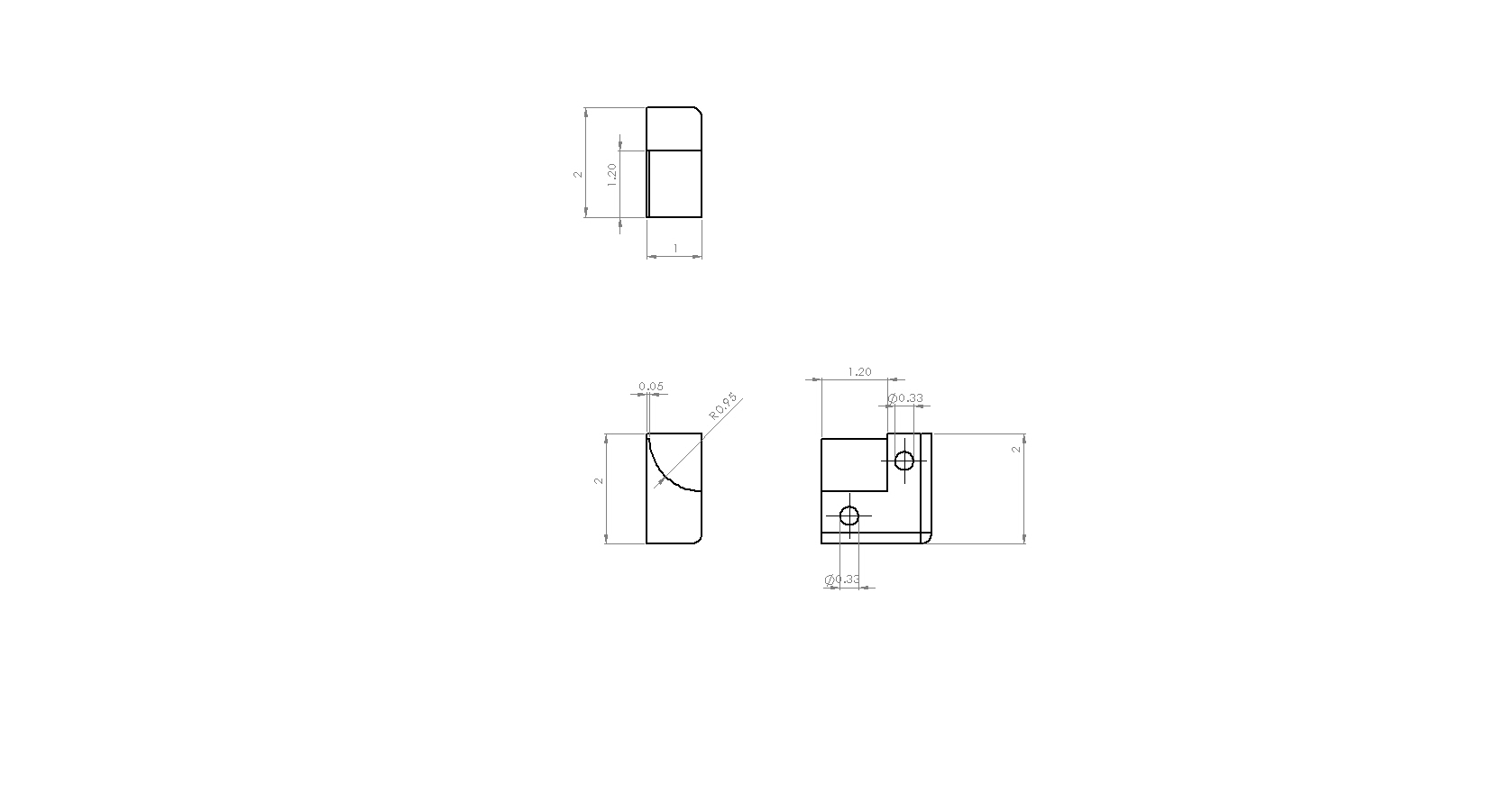
Fig.10駆動用バッテリーホルダー2
タイヤホイール、モーターマウント、モーターマウントサポートにタップ加工を施した。このとき、モーターマウントサポートの取り付けに不具合が生じた。詳しくは6.不具合報告に記述する。
モーターマウントサポートに関して、作り直し取り付け直した。
3.5 標準機の統合、組み立て
ケーブルについてを参考に配線を行い、それぞれ作成したArduinoとRaspbrry Pi、機体を統合し標準機を組み立てた。・駆動部の組み立て
(ⅰ)タイヤの中に細いタイヤ2本をセットした。
(ⅱ)タイヤホイールとタイヤを接続する ※マイナスドライバーを活用すると設置しやすかった。
(ⅲ)モーターマウントサポートをモーターに通し、モーターマウントとモーターをM3のネジで固定する。
(ⅳ)モーターシャフトにタイヤホイールを固定した。
(ⅴ)モーターマウント、モーターマウントサポートと下段シャーシをM5のキャップボルトで固定する。
(ⅵ)駆動用バッテリーホルダ(4個)をM3ねじとナットで固定した。
(ⅶ)ボールキャスター(2個)をM2.6ねじとナットで固定した。
(ⅷ)短支柱と下段シャーシをM5キャップボルトで固定した。
(ⅸ)長支柱と下段シャーシをM5キャップボルトで固定した。
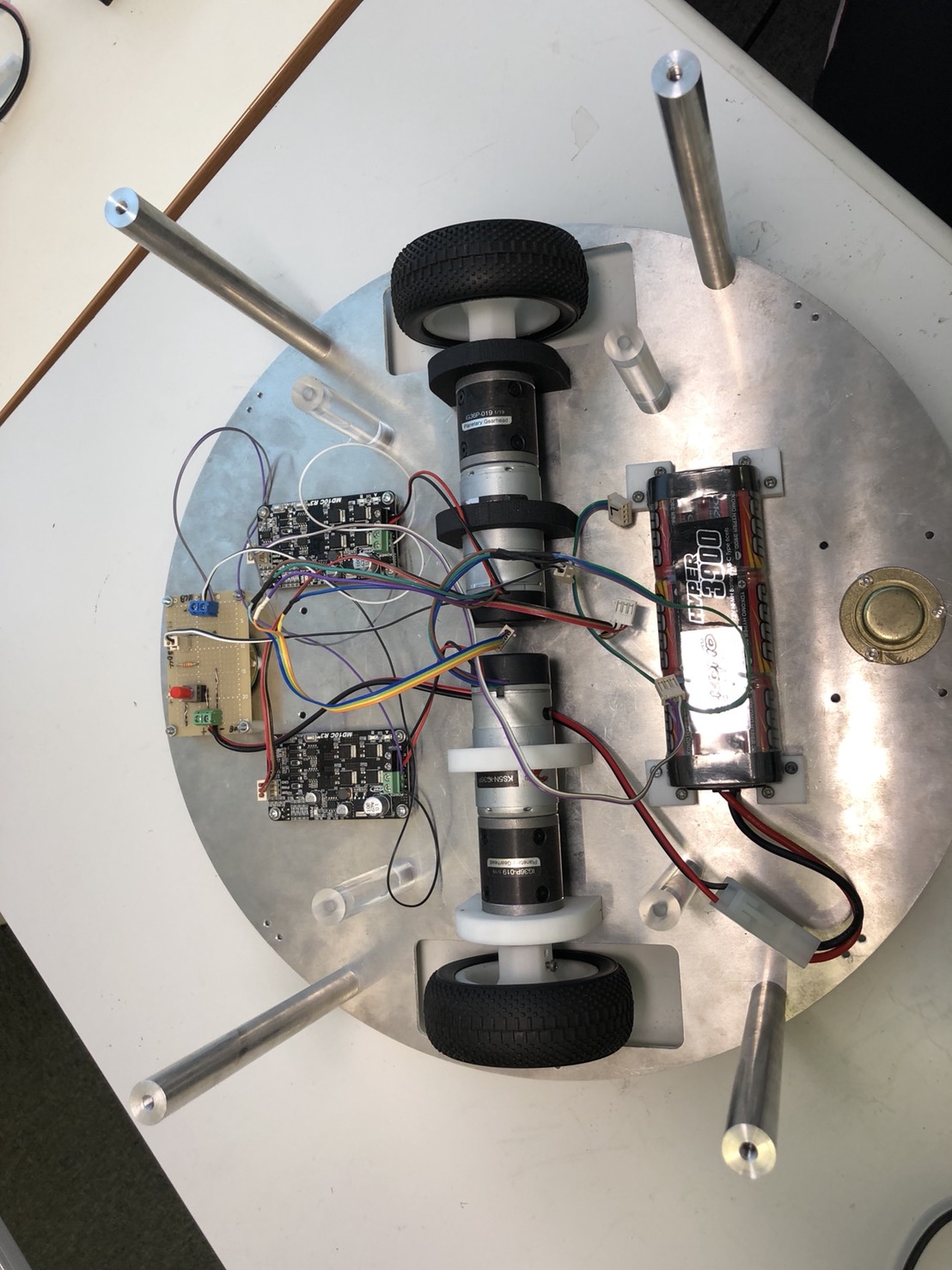
Fig.12駆動部
・制御部の組み立て
(ⅰ)制御用バッテリーホルダ(4個)をM3ねじとナットで固定した
(ⅱ)超音波センサマウント(2個)をM3ねじとナットで固定した
(ⅲ)中段シャーシと短支柱をM5キャップボルトで固定した
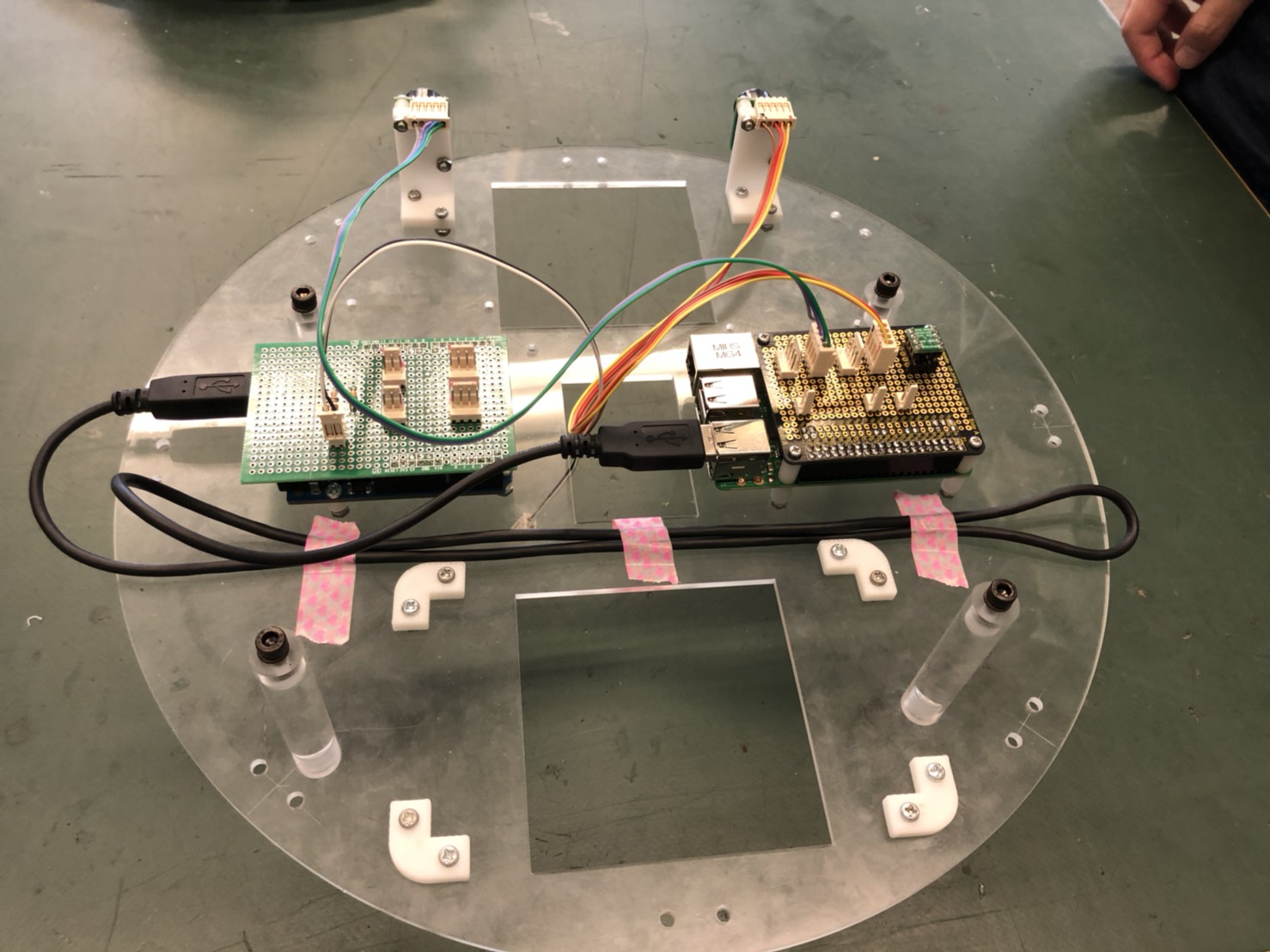
Fig.13 制御部
・拡張部の組み立て
上段シャーシと長支柱をM5キャップボルトで固定した
Fig.13、14、15、16に統合した標準機を示す。
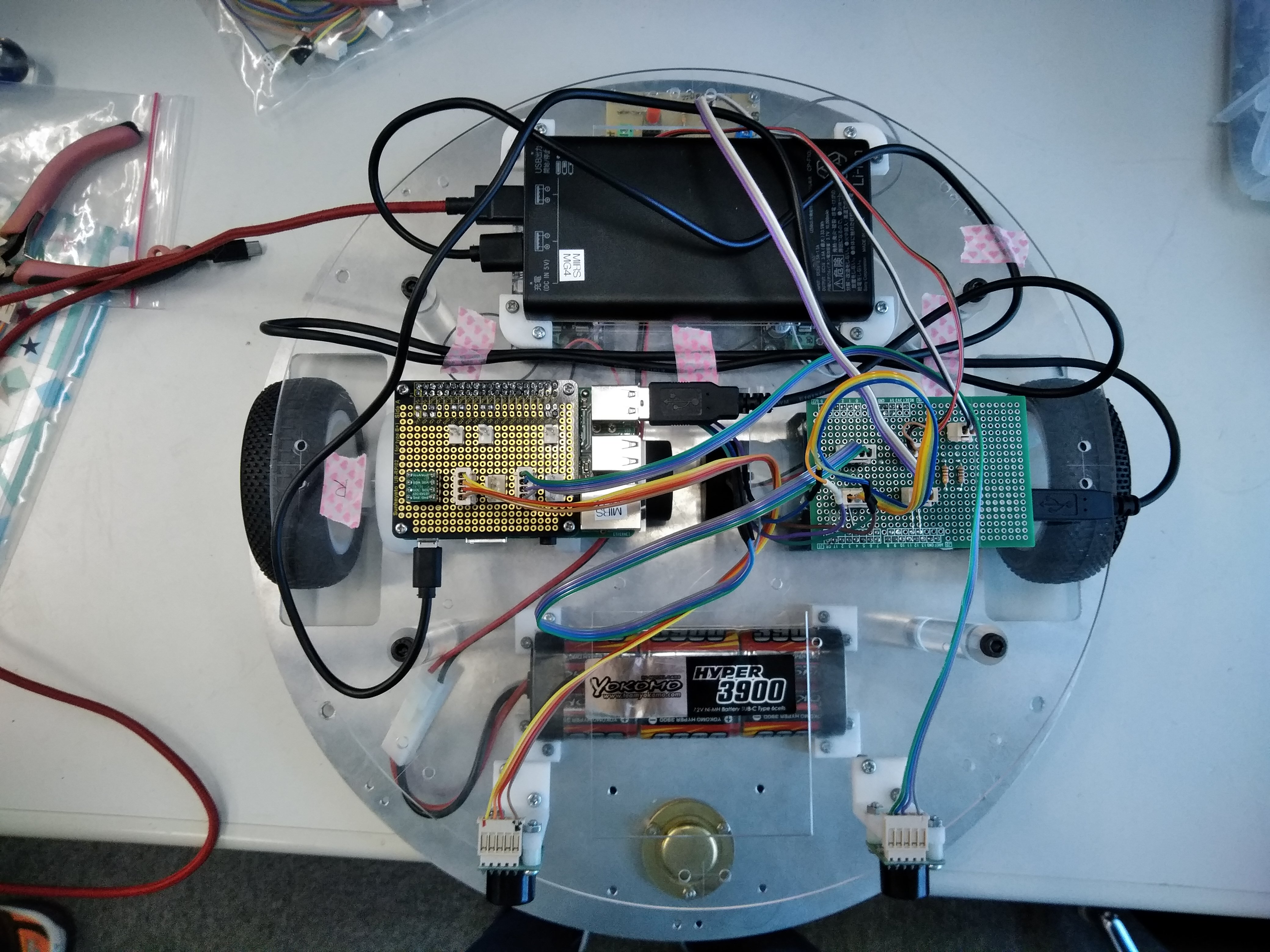
Fig.14 標準機機体(上から)
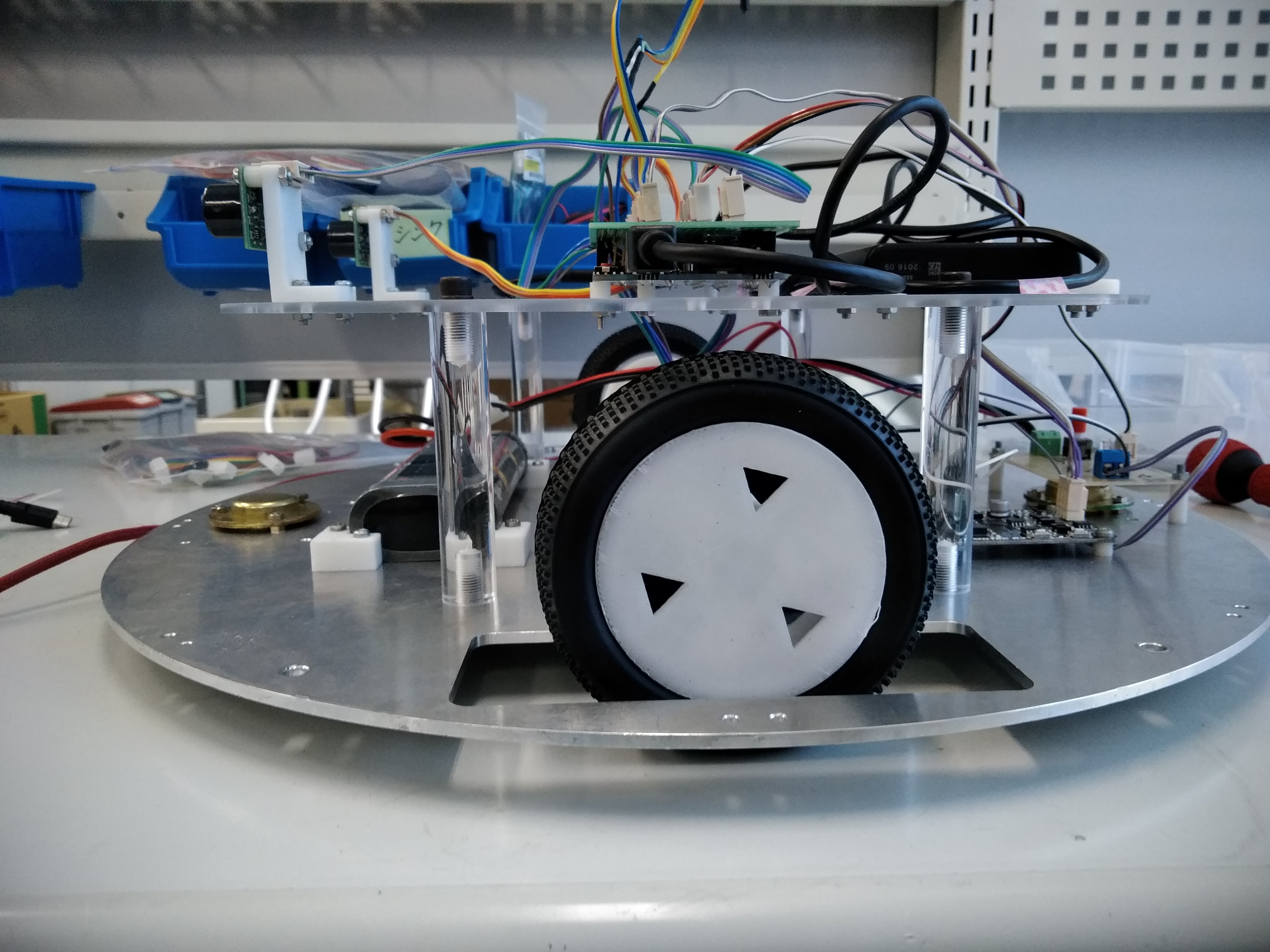
Fig.15 標準機機体(横から)
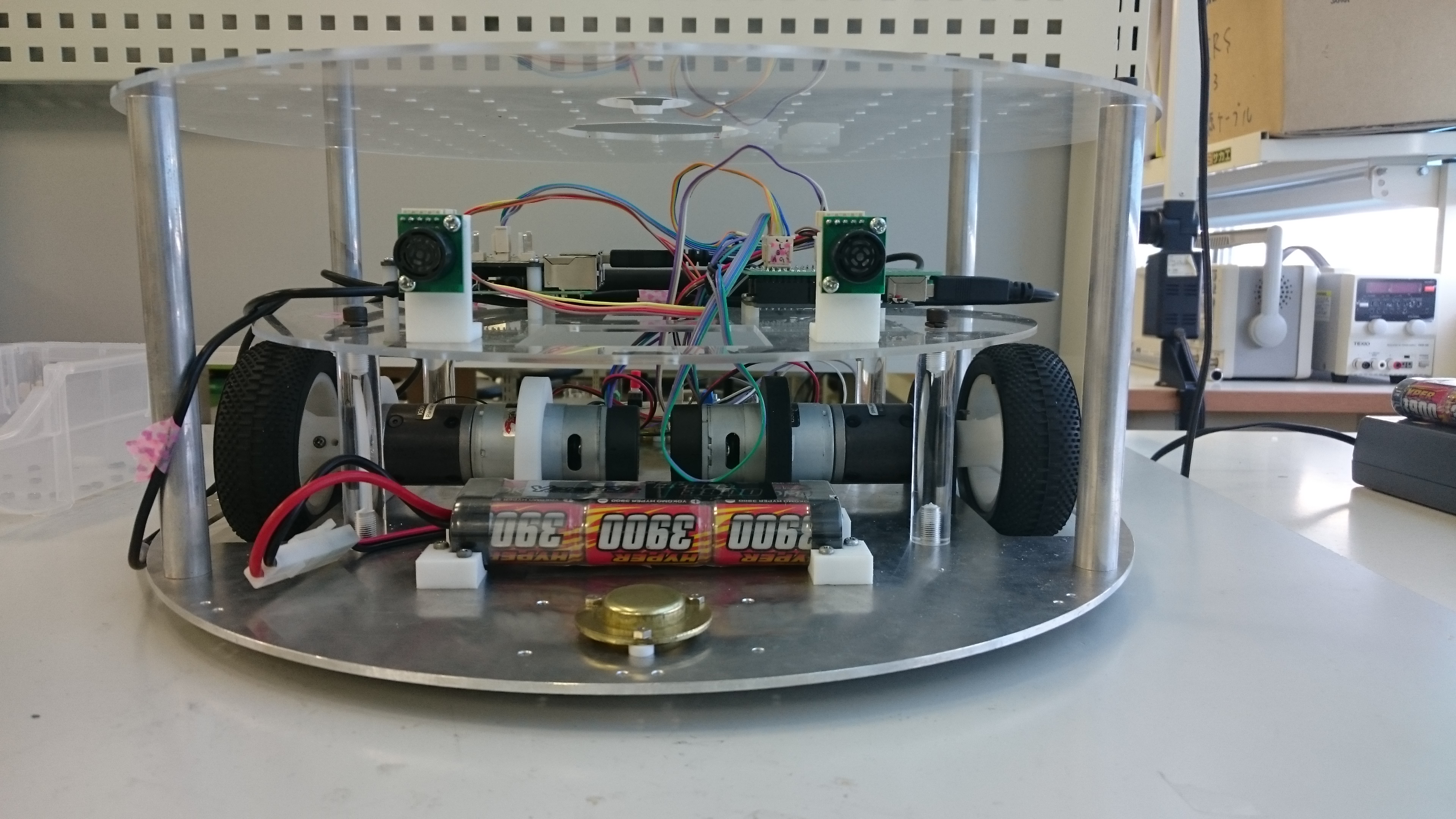
Fig.16 標準機機体(前から)
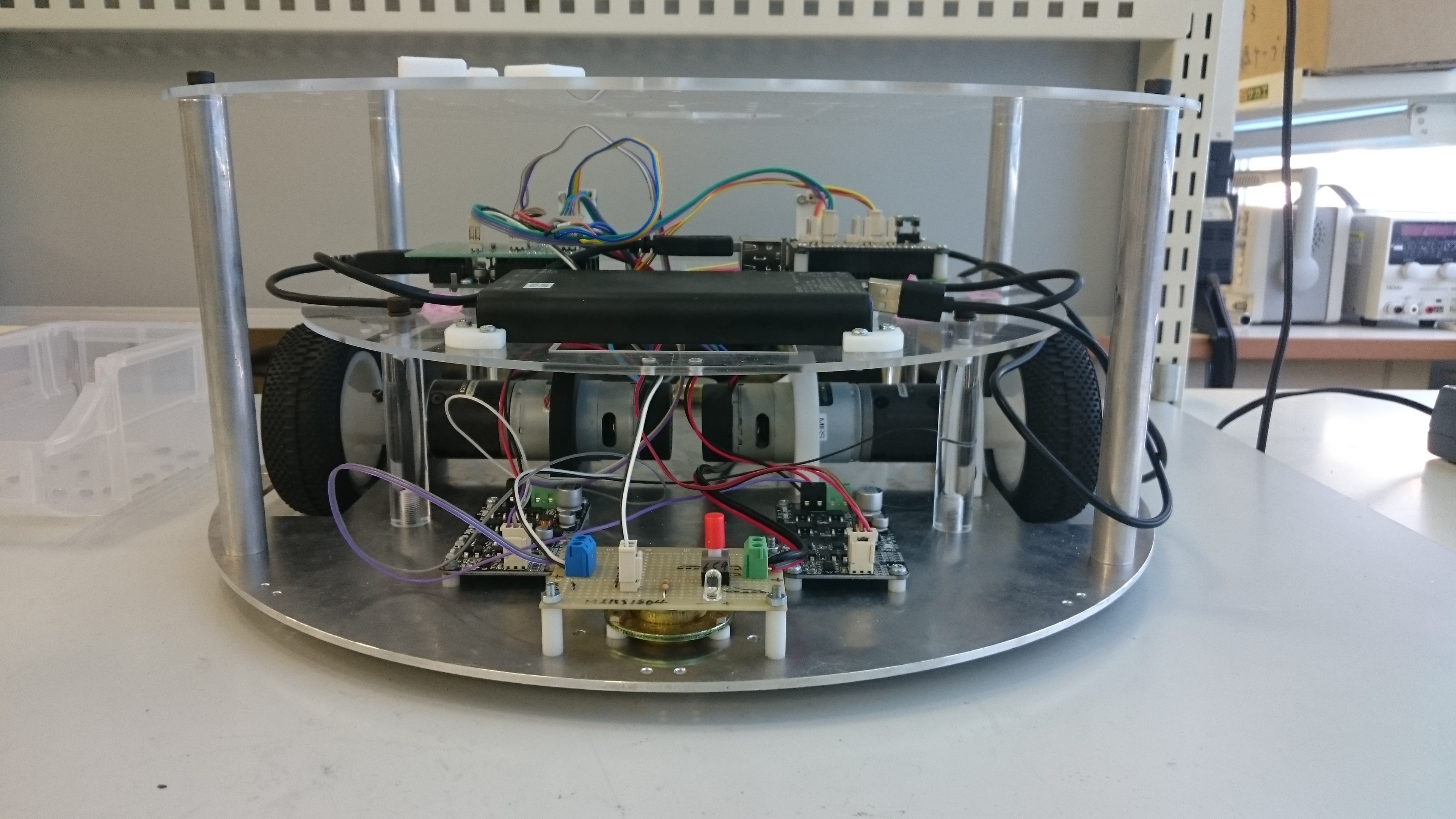
Fig.17 標準機機体(後ろから)
