| 名称 |
MIRS1804 標準機製作報告書 |
| 番号 |
MIRS1804-REPT-0001 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2018.5.17 |
足立颯一郎 |
大沼先生 |
初版 |
ドキュメント内目次
- はじめに
- 担当
- 製作手順
- 単体試験結果
- 統合試験結果
- 不具合報告
1.はじめに
-
本ドキュメントは、MIRS1804の標準機製作報告書である。
2.担当
| 役割 |
担当者 |
| 駆動系電源ボード |
土屋優貴,板屋醍嗣 |
| Arduino |
足立颯一郎,中村美月 |
| RasberryPi |
川口大和,米持春貴 |
| 標準機メカニクス |
小池勇太,山崎蒼人 |
3.製作手順
-
3.1 駆動系電源ボードの製作
①駆動系スイッチボード
回路図を元に、ユニバーサル基盤上に実装した。回路図をFig.1に示す。
基板配線に用いるケーブルは被覆径が2mm~3mmのものか、金属線(リード線をカットしたもの)を用いた。
バッテリーおよびMCB接続の端子は、Fig2のようにターミナルブロック2ピン(縦・小)を用いた。入力側(バッテリ)を緑、出力側(MCB)を青とした。
電圧監視用ポートには Molex 2ピンのハウジングを用いた。
短絡しているところは 駆動系電源ボードの部品面をFig.2、はんだ面をFig.3に示す。
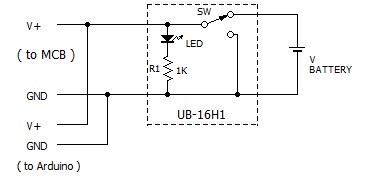
Fig.1 回路図
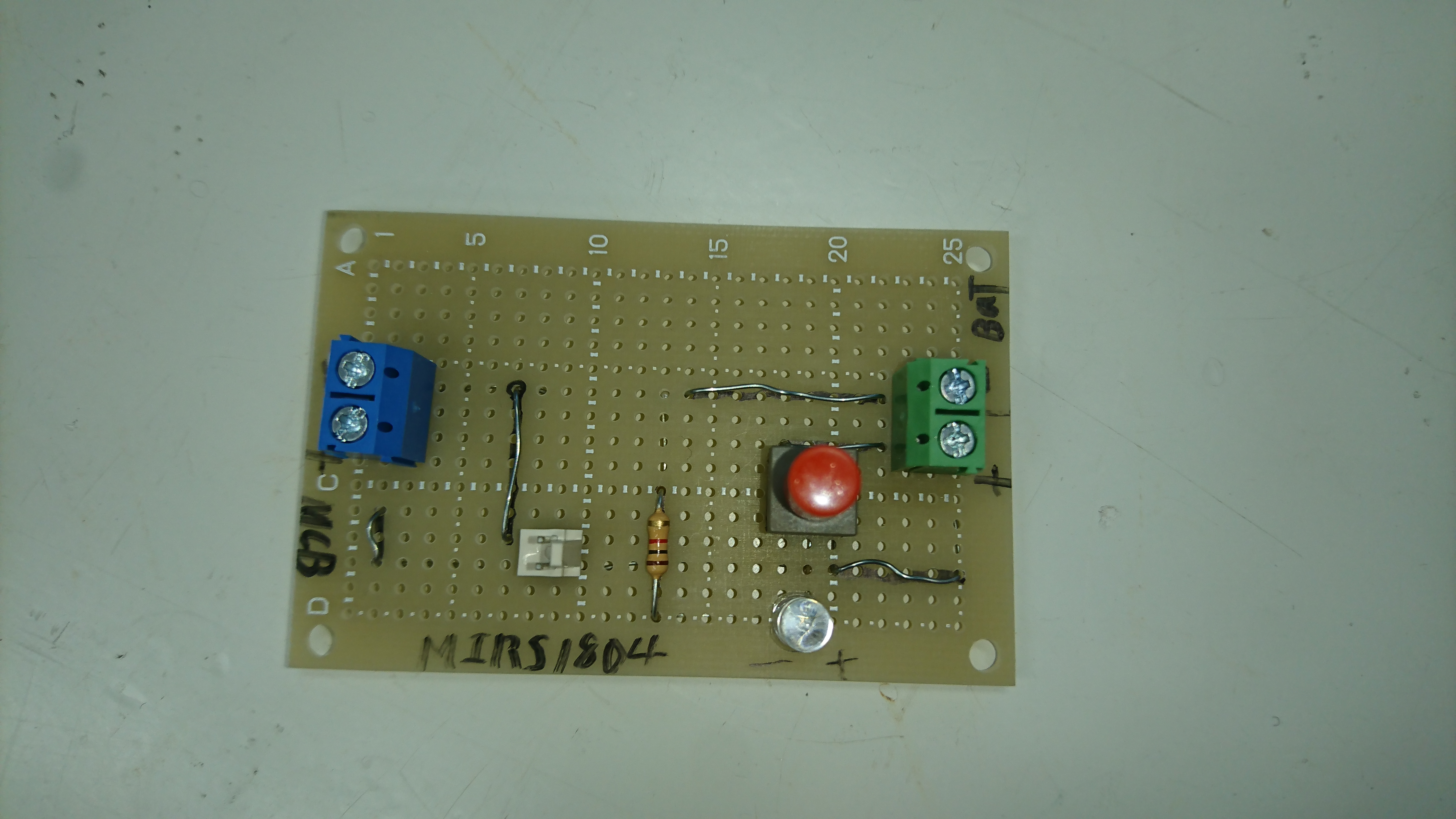
Fig.2 駆動系電源(部品面)
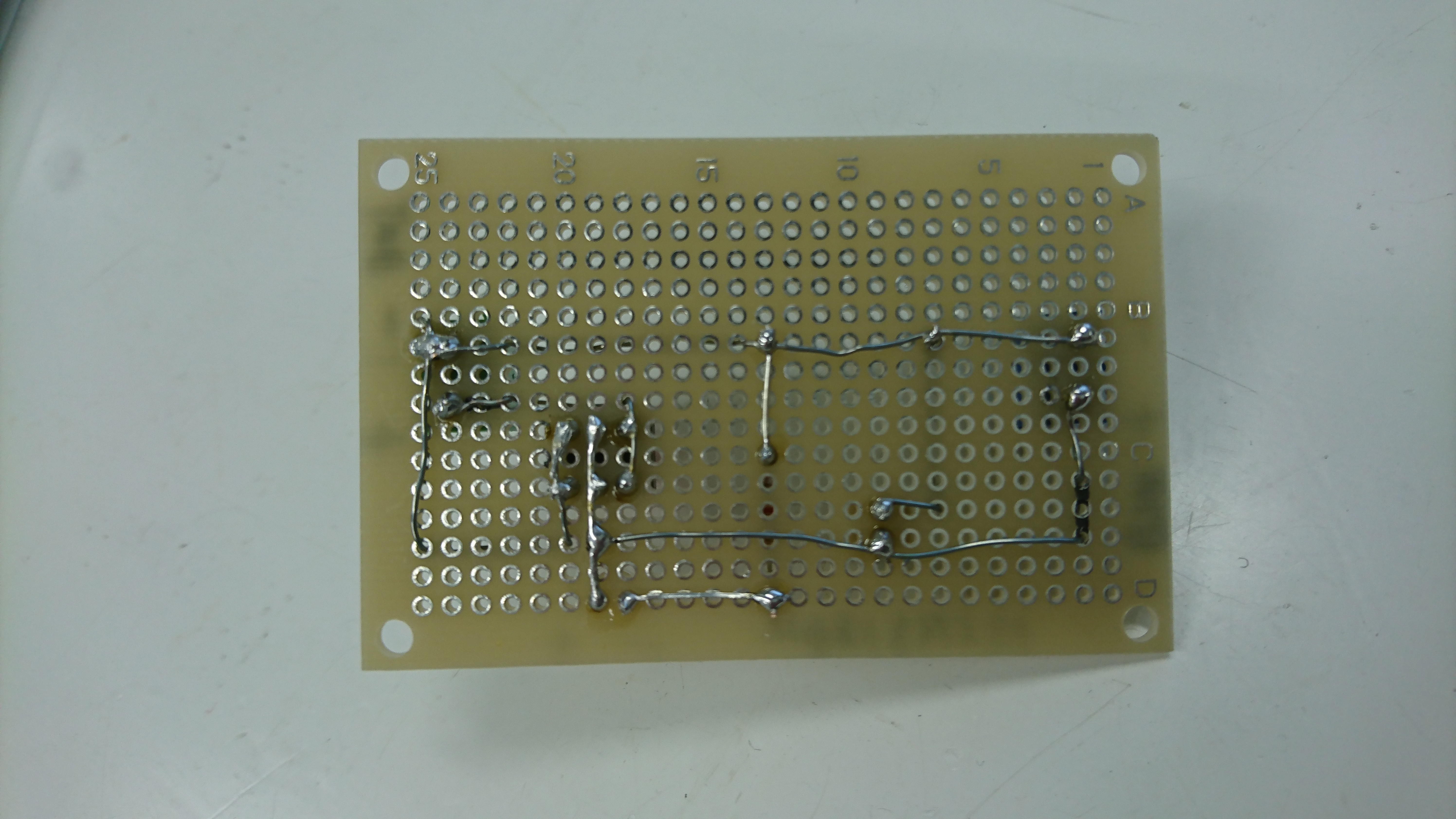
Fig.3 電源ボード(はんだ面)
テスターを用いてスイッチがONの状態とOFFの状態とで導通に不備がないかチェックを行った。
また、電源を接続し、スイッチを入れてMCB側に電源電圧が出力されているか、LEDが点灯しているかを確認した。
同様にスイッチを入れた際に、電圧監視用ポートに電源電圧が出力されているかを確認した。
すべて正しく確認できた。
②電源ケーブル
接続ケーブルには被覆径が2mm~3mmのものを使用した。
被覆を剥き、コンタクトピンを先端に取り付けた。
3.2 Arduino
①ユニバーサル基盤
Arduino のセットアップとデバイス接続を参考に配線およびはんだ付けを行った。このとき、ヘッダピンが傾かないように注意する必要があった。
ユニバーサル基盤の部品面をFig.4、はんだ面をFig.5に示す。
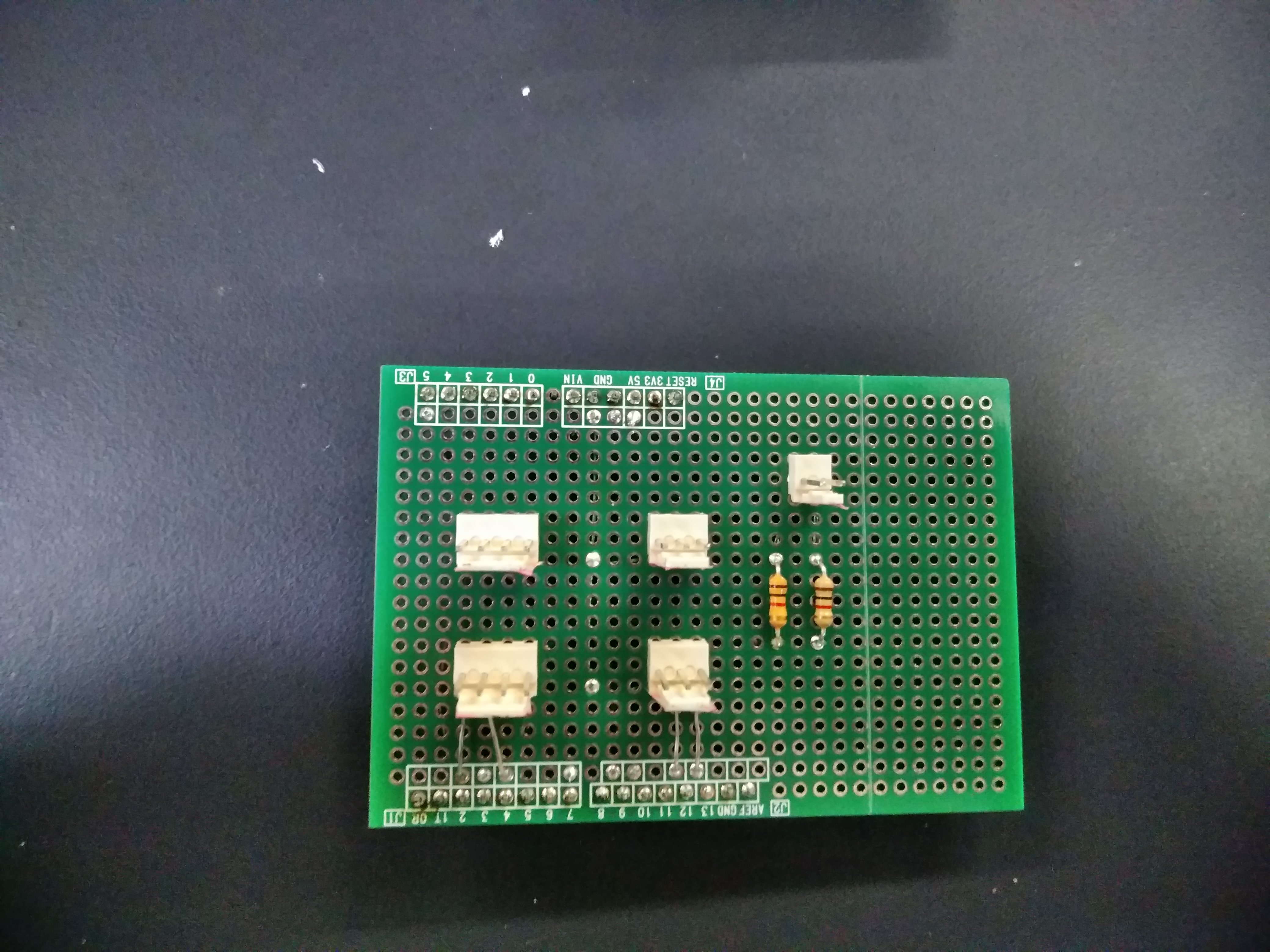
Fig.4 ユニバーサル基盤(部品面)
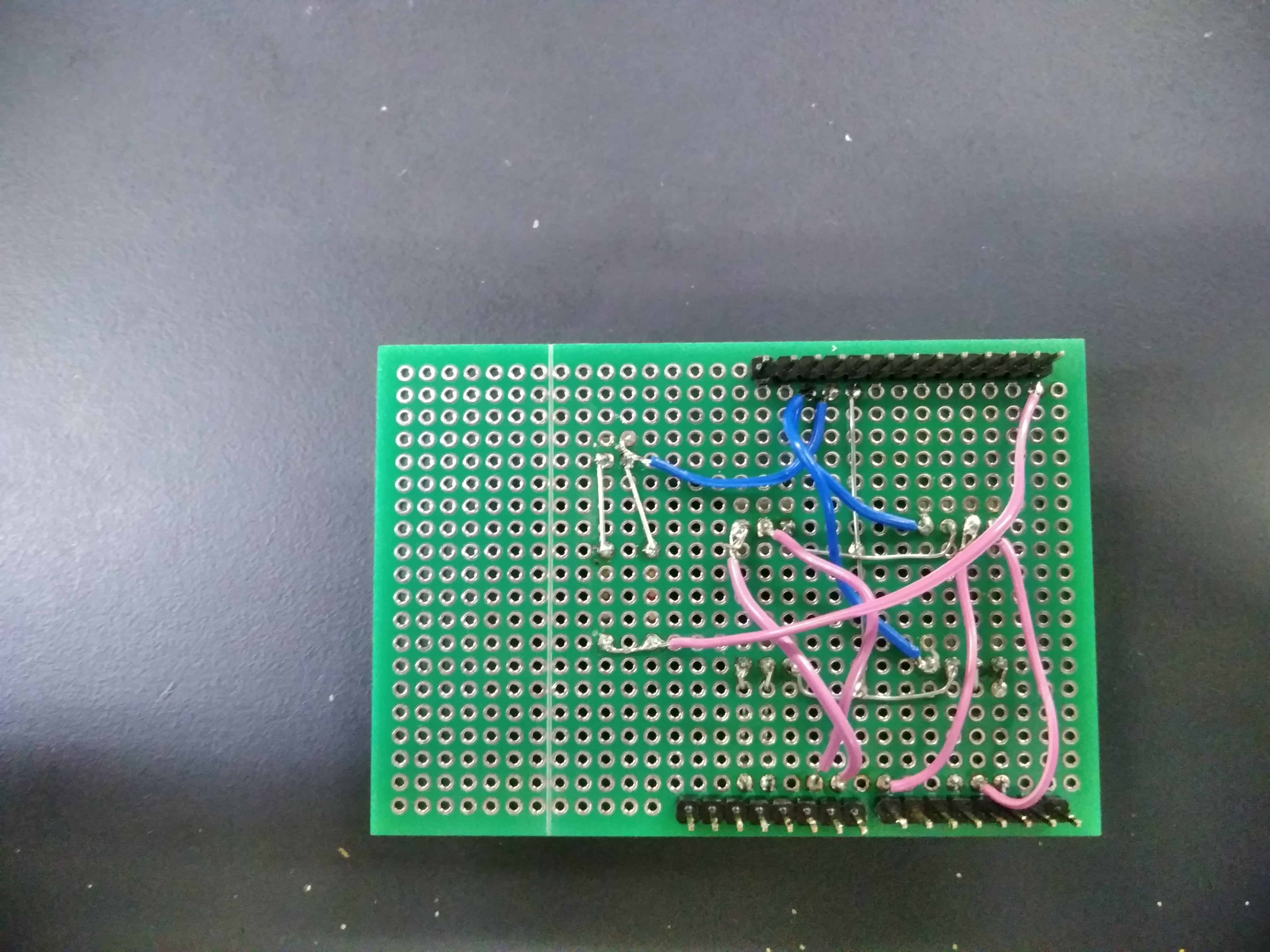
Fig.5 ユニバーサル基盤(はんだ面)
②導通チェック
短絡している箇所はなかった。
3.3 Raspberry Pi
①ユニバーサル基盤
RaspberryPi のセットアップとデバイス接続を参考にしてRaspberry Piとデバイスとの接続に使用する、ユニバーサル基盤(UB-RPI02)のはんだ付けを行った。
Raspberry Pi用の20ピン×2列のピンソケット, I2Cレベル変換チップ用の8ピンICソケット(溝のあるほうが上となるようにはんだづけした), ON/OFF IOデバイス用の3個の2ピンのハウジング, 超音波センサ用の4個の4ピンハウジングをはんだ付けした。
Fig7、Fig8のようにはんだ付けを行った。
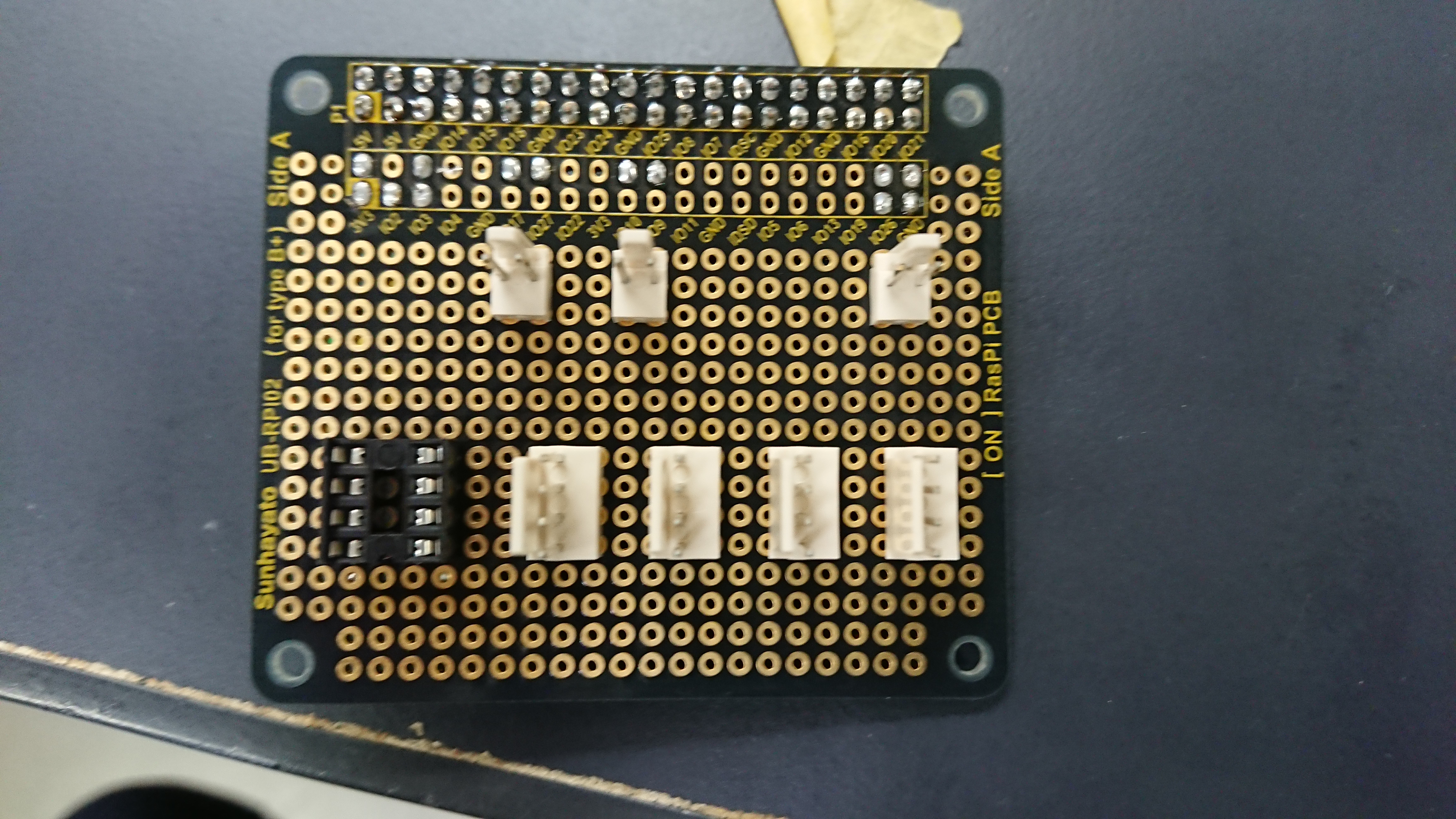
Fig.6 ユニバーサル基盤(部品面)
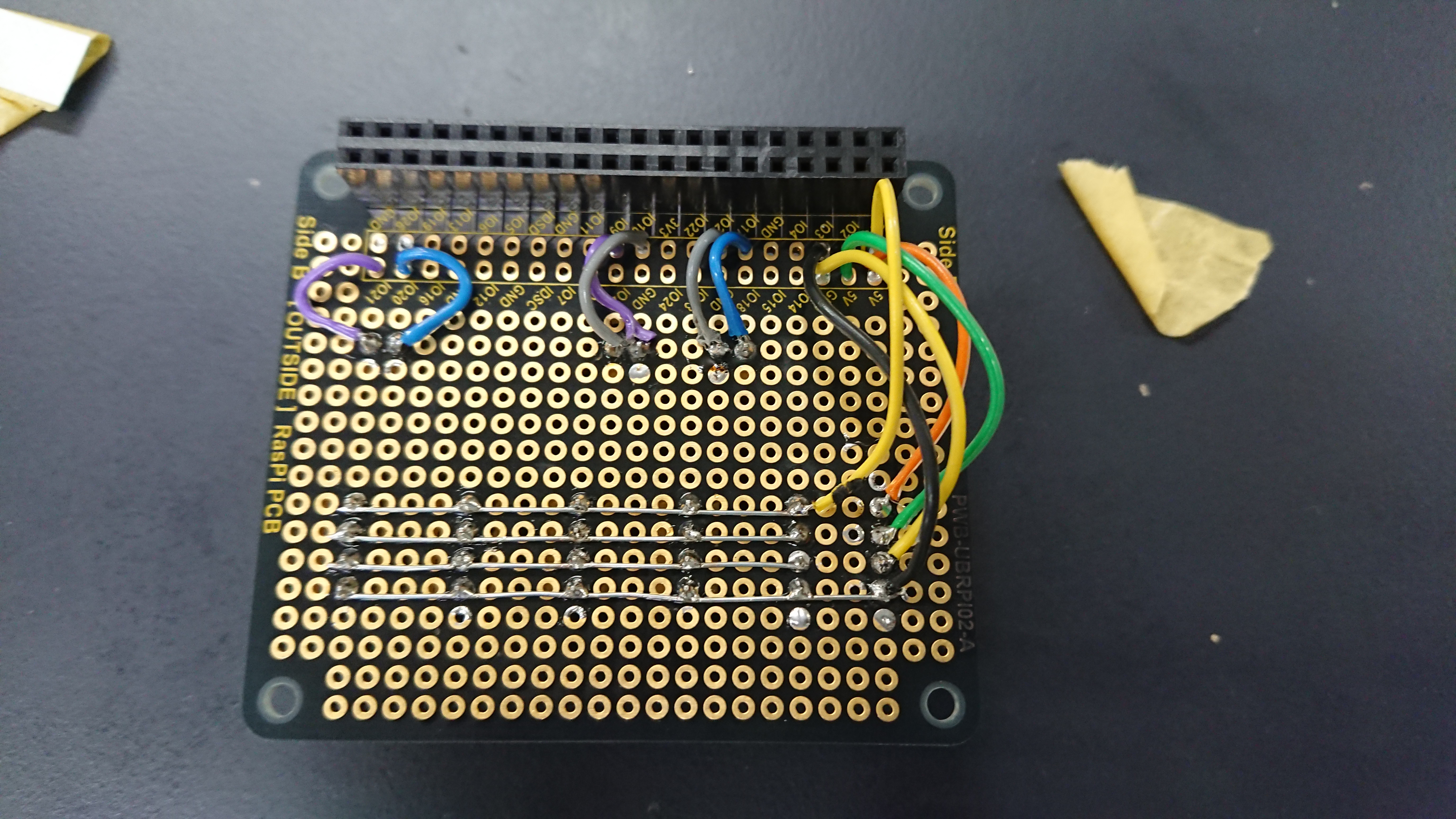
Fig.7 ユニバーサル基盤(はんだ面)
②導通チェック
テスターを用いて、はんだ付けを行ったすべての回路系に対して、導通、非道通のチェックを行った。
結果、ミスなくはんだ付けができていることを確認できた。
3.4 メカニクス
①バッテリーホルダー作り
- ・制御用バッテリー
- Solidworksを用いてFig.8の3D図面を作成した。
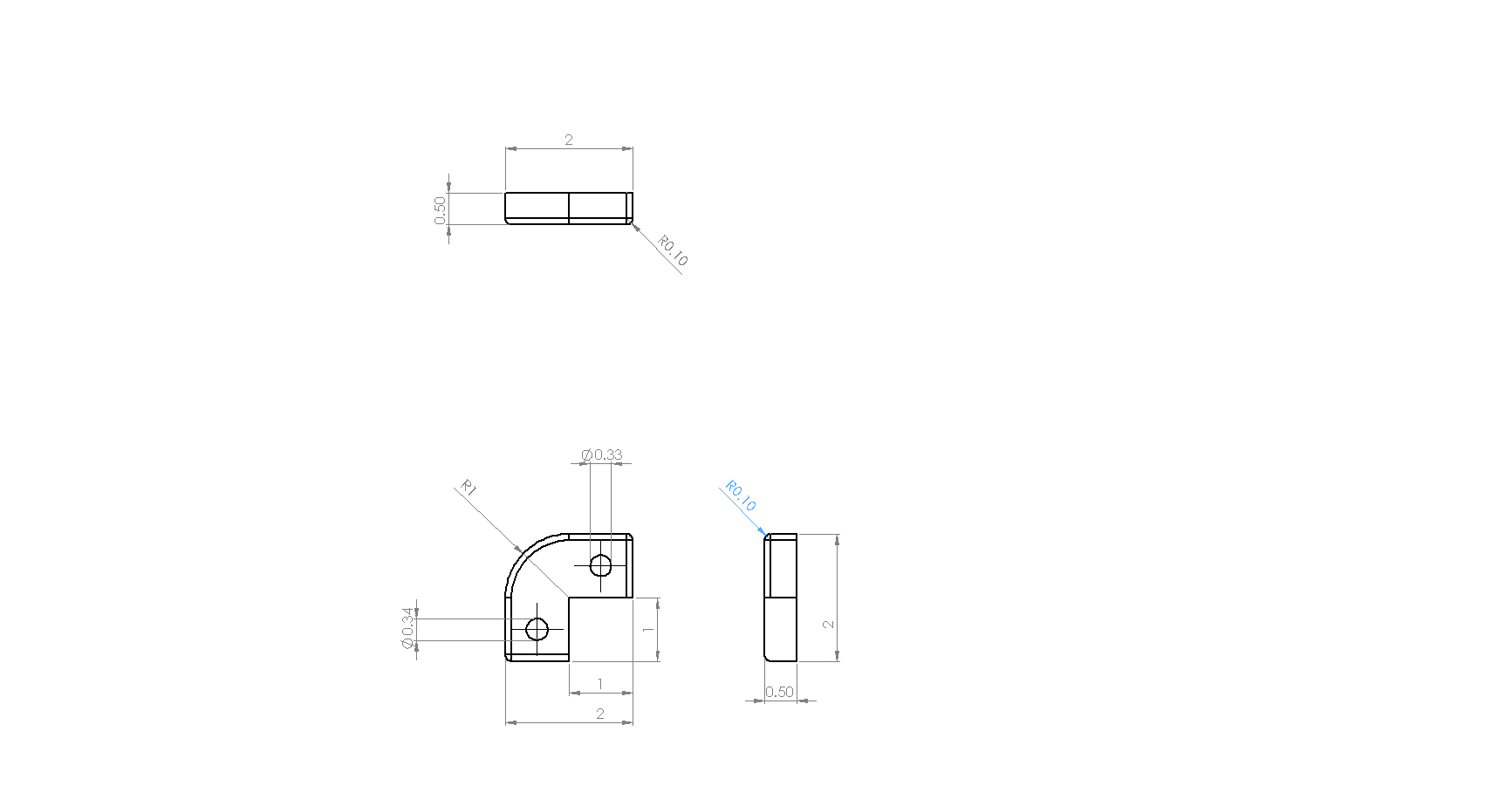
Fig.8 制御用バッテリーホルダー
- ・駆動用バッテリー
- Solidworksを用いてFig.10、11の3D図面を作成した。
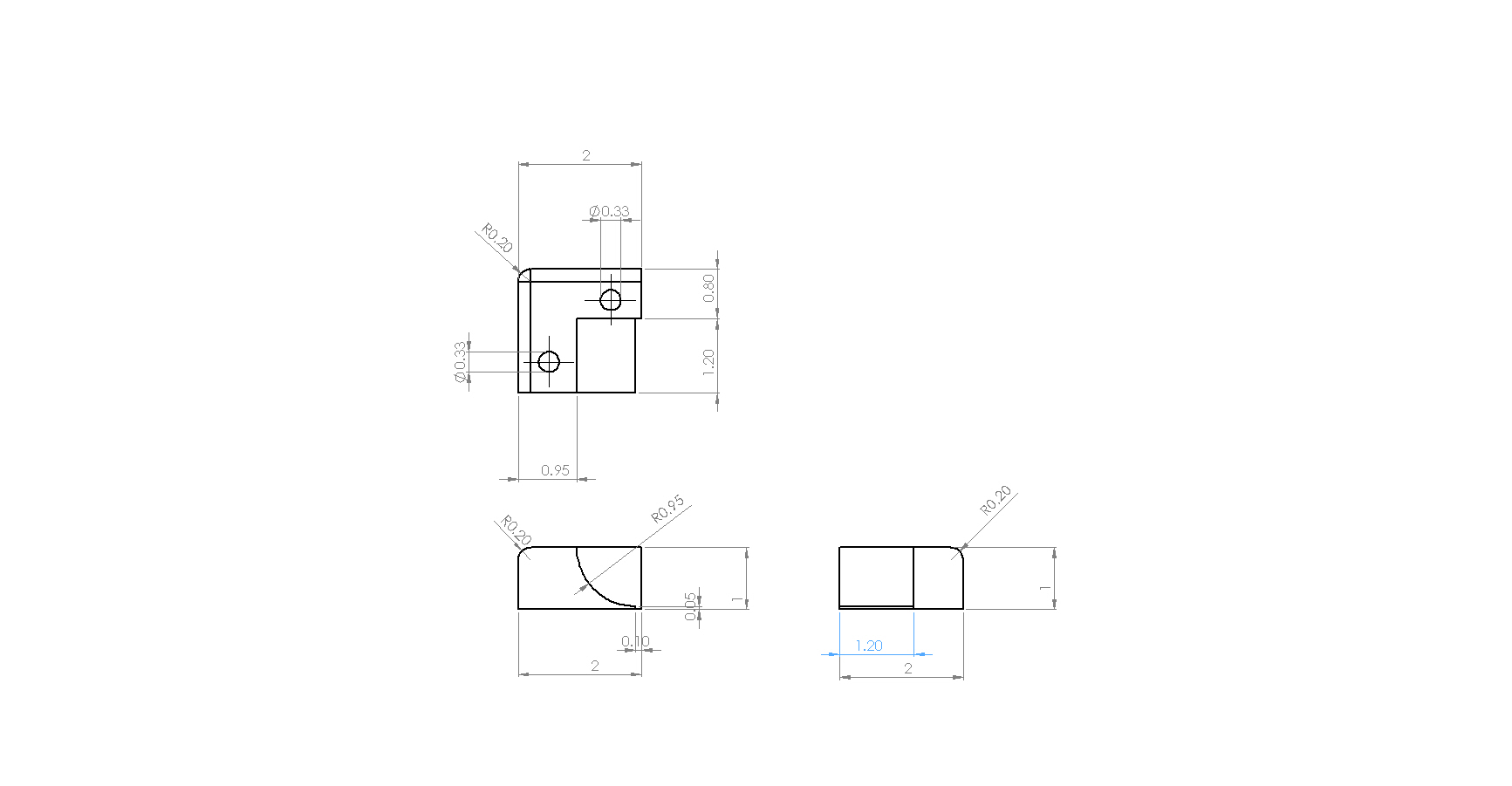
Fig.9駆動用バッテリーホルダー1
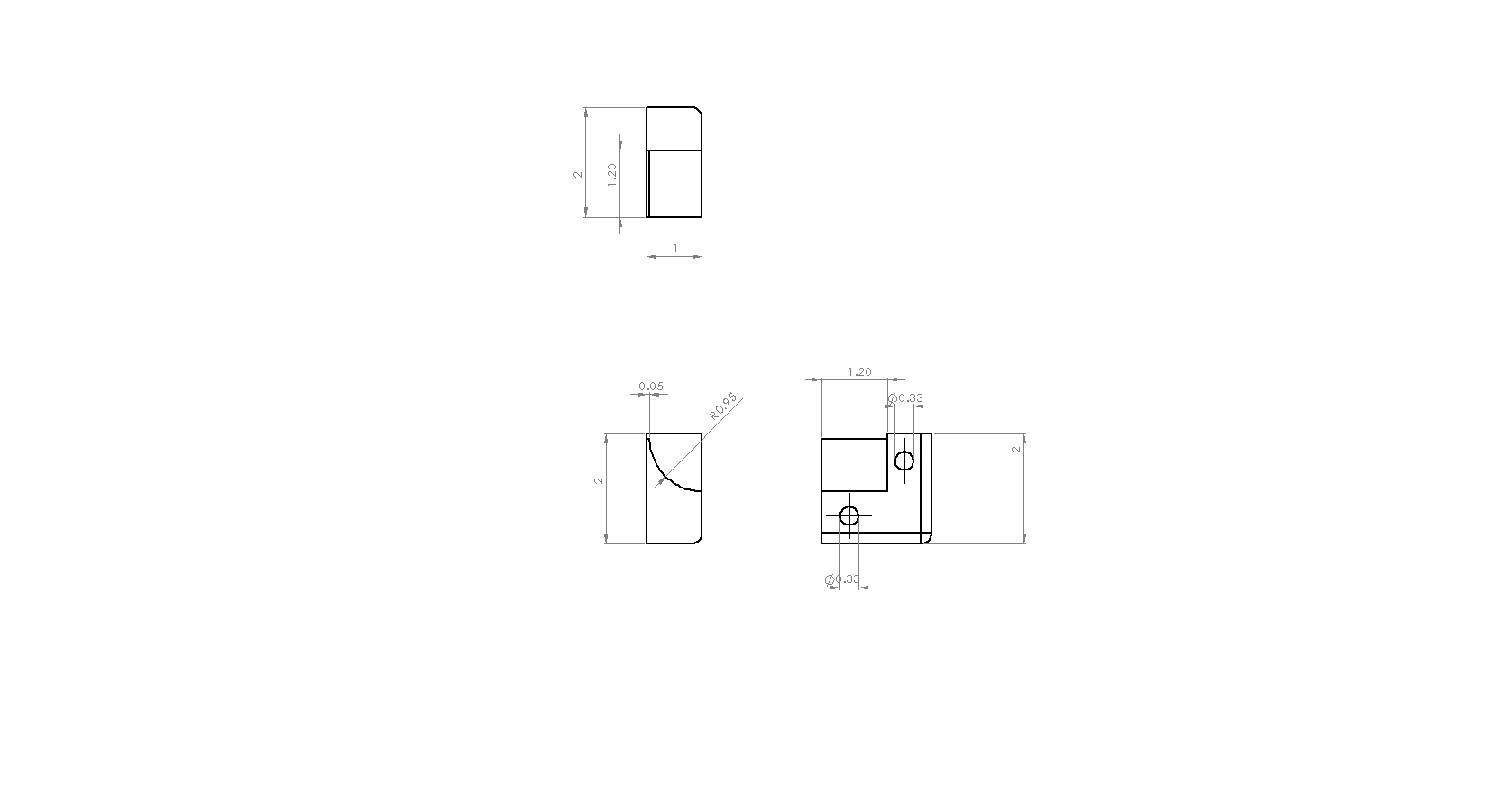
Fig.10駆動用バッテリーホルダー2
②タップ加工
タイヤ、モーターマウント、モーターマウントサポートにタップ加工を施した。
4.単体試験結果
-
4.1 Arduino
①接続
Arduino単体での動作試験を参考にPC、Arduino、ユニバーサル基盤、モータドライバ、駆動系電源ボード、バッテリーを接続し回路を導通させた。
②動作試験
- ・モータ動作テスト
- 問題なく動作したモータの出力値を変化させてもそれに対応した動作を行った。
- ・エンコーダテスト
- どちらのモータもエンコーダが正しく動作していた。
- ・速度制御のテスト
- 入力した値に対して、正しく動作した。値の変化に対応して速度も変化した。駆動系スイッチを入れたままソースコードをアップロードしたとき、アップロードが完了した瞬間に動作した。しかし、ソースコードのアップロードが完了してからスイッチを入れると動作しなかった。
- ・走行制御のテスト
- 入力した値に対して、正しく動作した。回転方向、回転角度、速度が変化した。
- ・バッテリー値の確認
- バッテリーの残量が表示された。
- ・シリア通信のエンコード、デコーダ値の確認
- 確認できた。
4.2 Raspberry Pi
Raspberry Pi での動作試験を参考にして単体動作試験を行った。
①デバイス接続
Raspberry Piにカメラ(1台)、ユニバーサル基盤に超音波センサ(2個)を接続した(タッチセンサについては導線を短絡させることで代用した)。
②Raspberry Piの起動とソースファイルの展開
まず、キーボード(USB)、マウス(USB)、ディスプレイ(HDMI)を接続し、Raspberry Pi を起動した。
その後、MIRSMG4D-SYST-0008からmg4_pi_ver3.0.tar.gzをダウンロードし、tar xvf mg4_pi_ver3.0.tar.gzというコマンドで"test"ディレクトリに展開した。
③動作確認
上で展開したプログラムを実行し、タッチセンサ、超音波センサ、カメラの動作確認、またカメラでの数字認識の確認を行った。
全て正常な動作を示した。
④Arduinoと接続しての動作確認
Fig.11のようにRasberryPiとArduinoを接続し、動作確認を行った。
RasberryPiからtest_requestを行った結果、正常に動作した。

Fig.11 Arduiとの接続
5.統合試験
-
5.1 標準機の統合、組み立て
ケーブルについてを参考に配線を行い、それぞれ作成したArduinoとRaspbrry Pi、機体を統合し標準機を組み立てた。
・駆動部の組み立て
(ⅰ)タイヤの中に細いタイヤ2本をセットした。
(ⅱ)タイヤホイールとタイヤを接続する ※マイナスドライバーを活用すると設置しやすかった。
(ⅲ)モータマウントサポートをモータに通し、モータマウントとモータをM3のネジで固定する。
(ⅳ)モータシャフトにタイヤホイールを固定した。
(ⅴ)モータマウント、モータマウントサポートと下段シャーシをM5のキャップボルトで固定する。
(ⅵ)駆動用バッテリーホルダ(4個)をM3ねじとナットで固定した。
(ⅶ)ボールキャスター(2個)をM2.6ねじとナットで固定した。
(ⅷ)短支柱と下段シャーシをM5キャップボルトで固定した。
(ⅸ)長支柱と下段シャーシをM5キャップボルトで固定した。
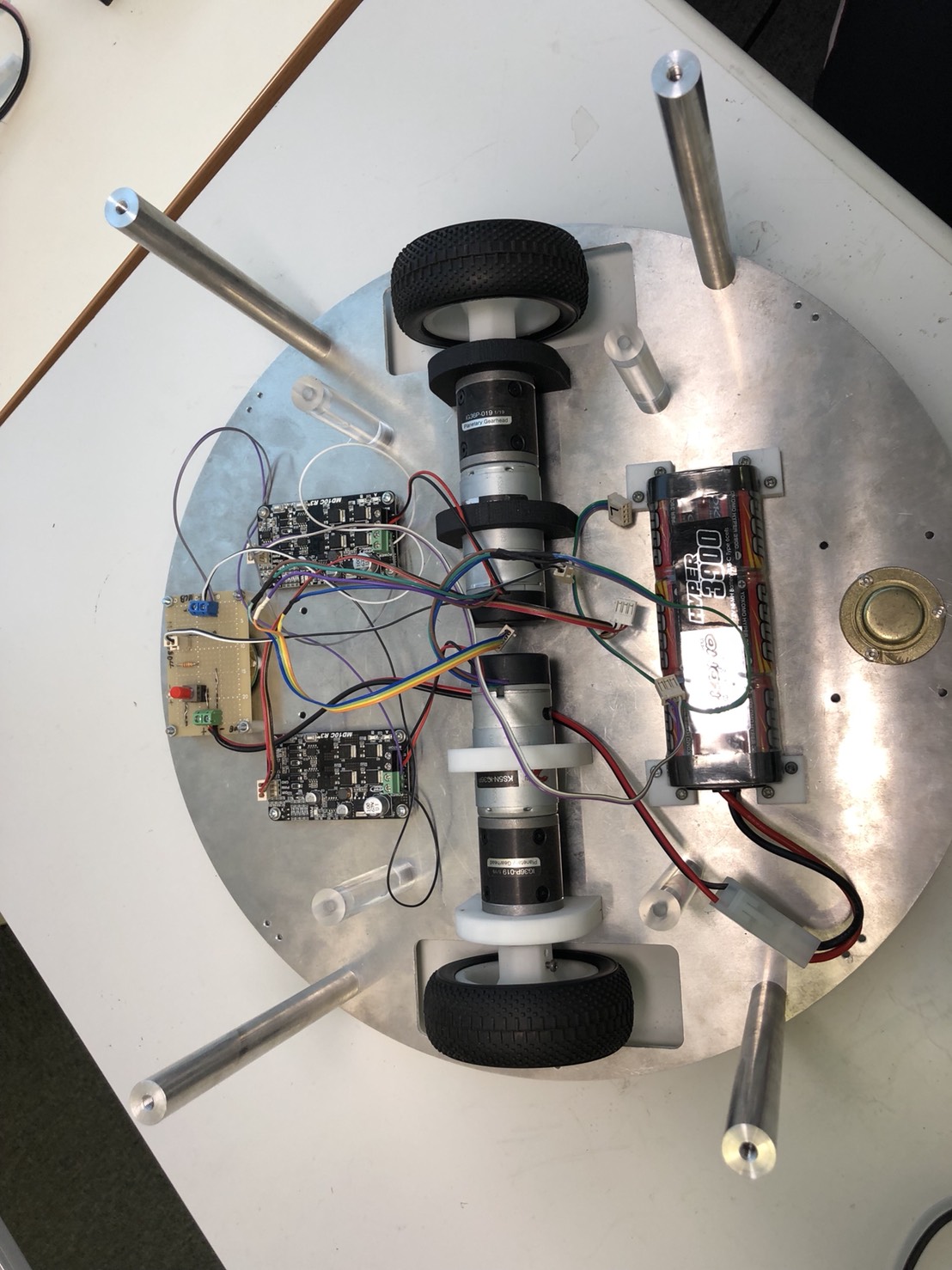
Fig.12駆動部
・制御部の組み立て
(ⅰ)制御用バッテリーホルダ(4個)をM3ねじとナットで固定した
(ⅱ)超音波センサマウント(2個)をM3ねじとナットで固定した
(ⅲ)中段シャーシと短支柱をM5キャップボルトで固定した
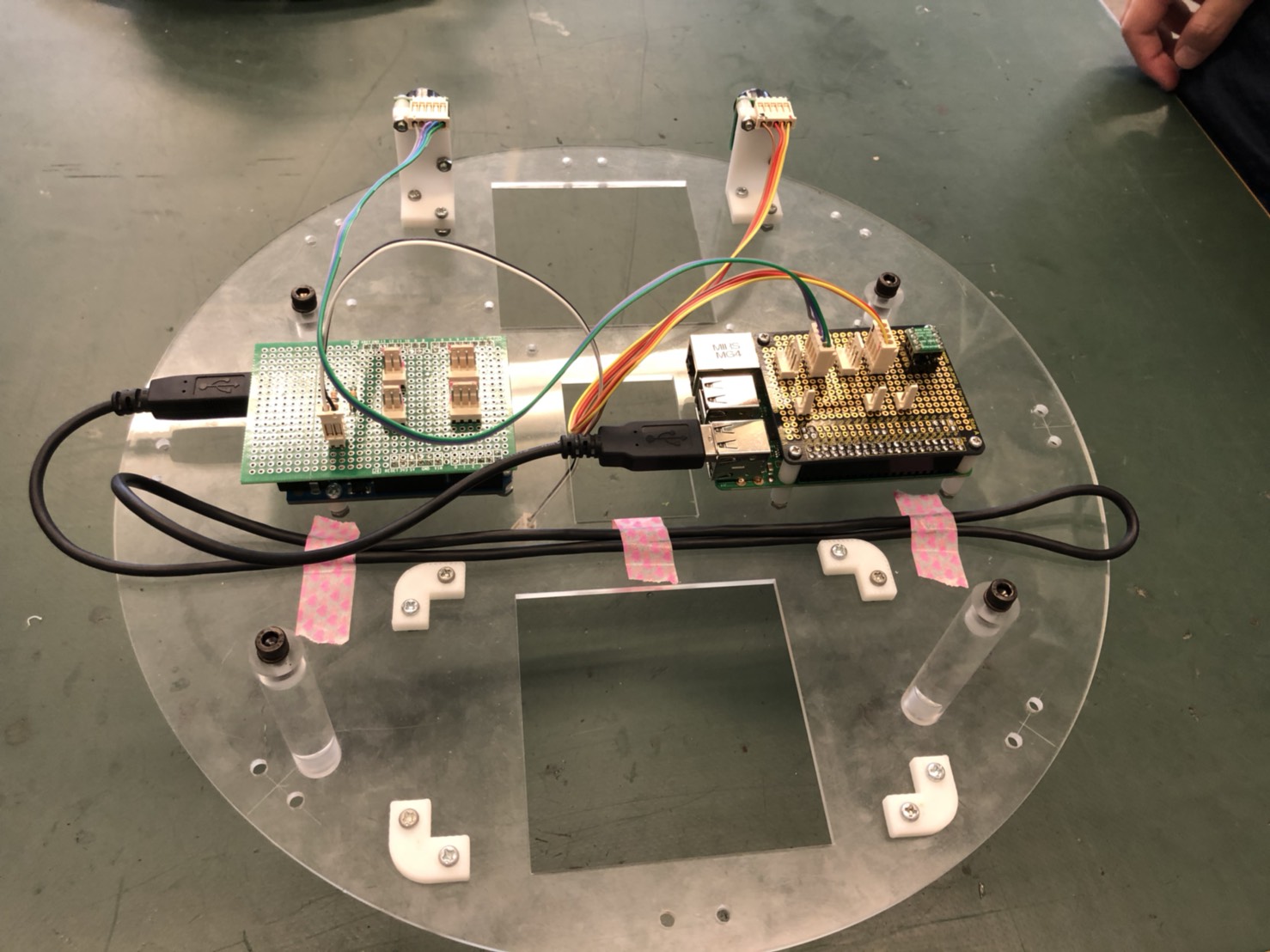
Fig.13 制御部
・拡張部の組み立て
上段シャーシと長支柱をM5キャップボルトで固定した
Fig.13、14、15、16に統合した標準機を示す。
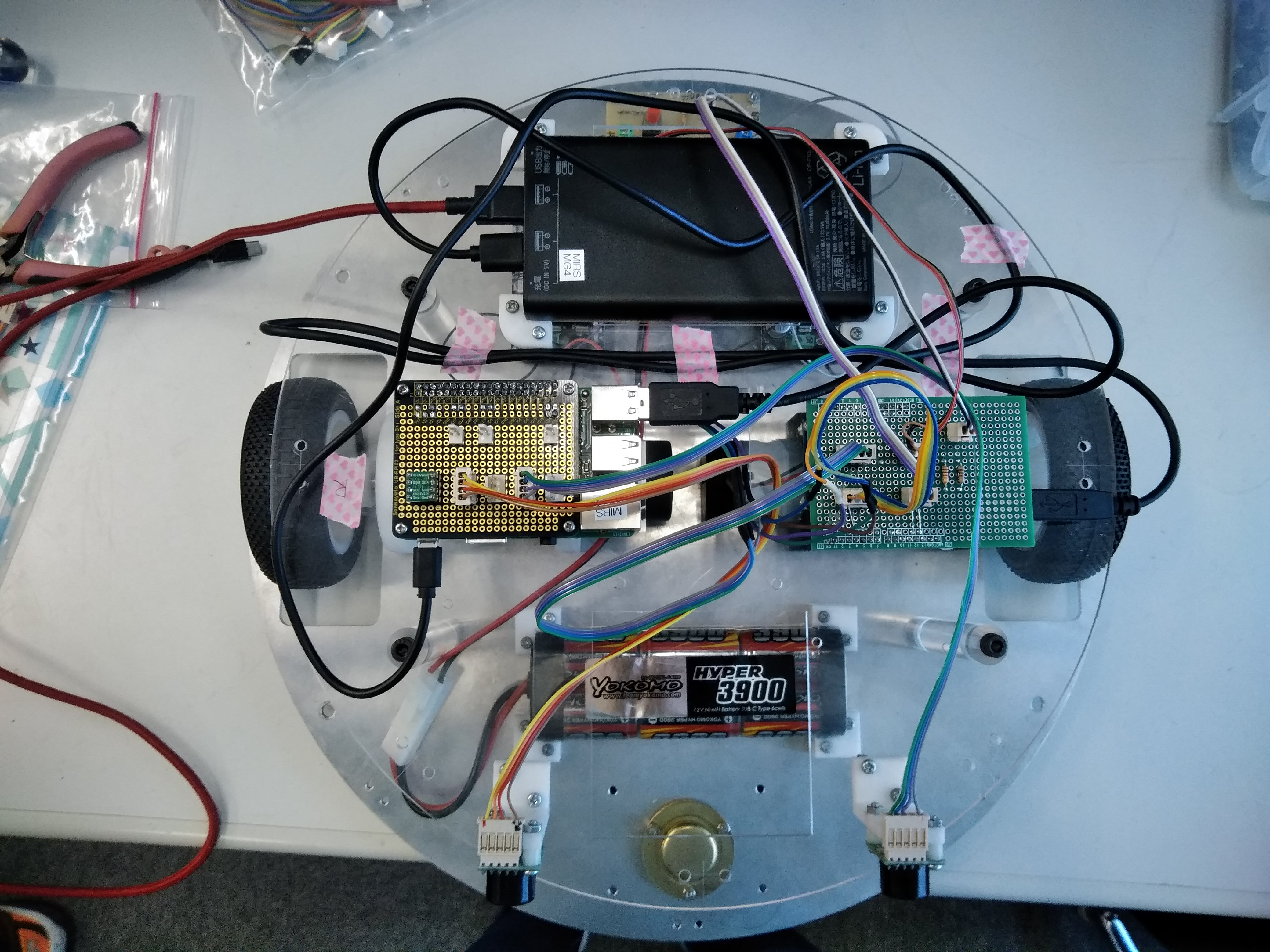
Fig.14 標準機機体(上から)
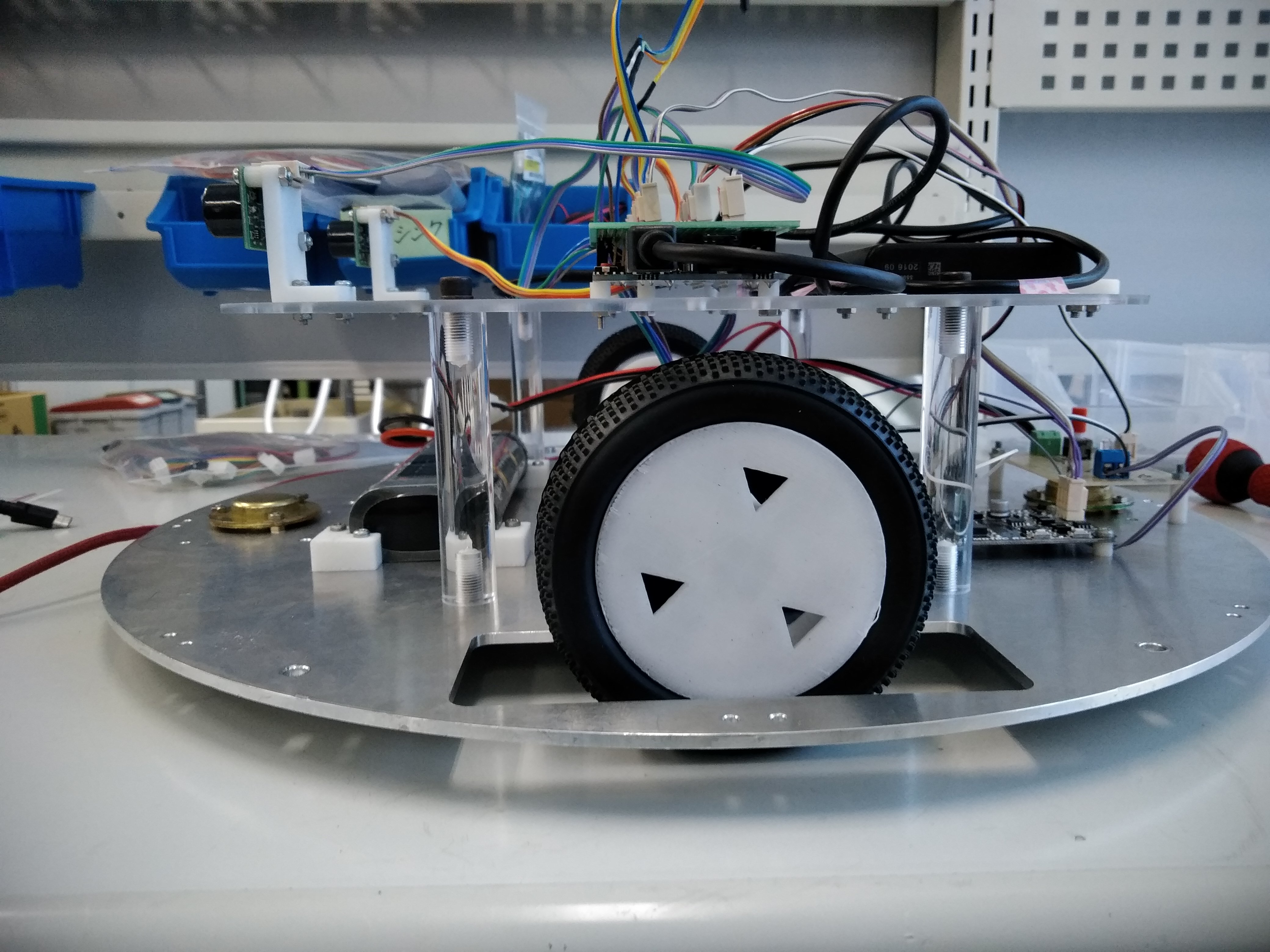
Fig.15 標準機機体(横から)
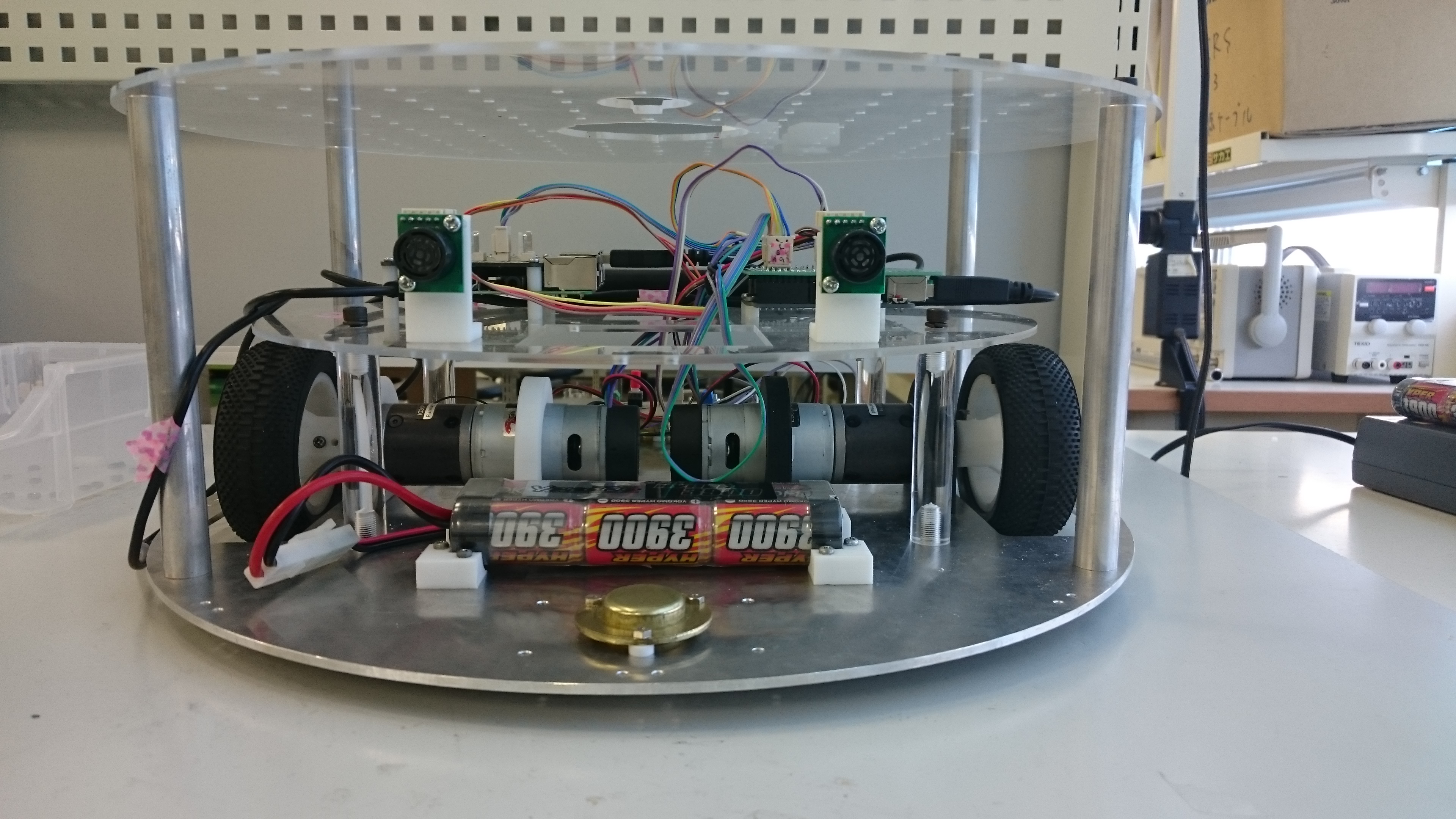
Fig.16 標準機機体(前から)
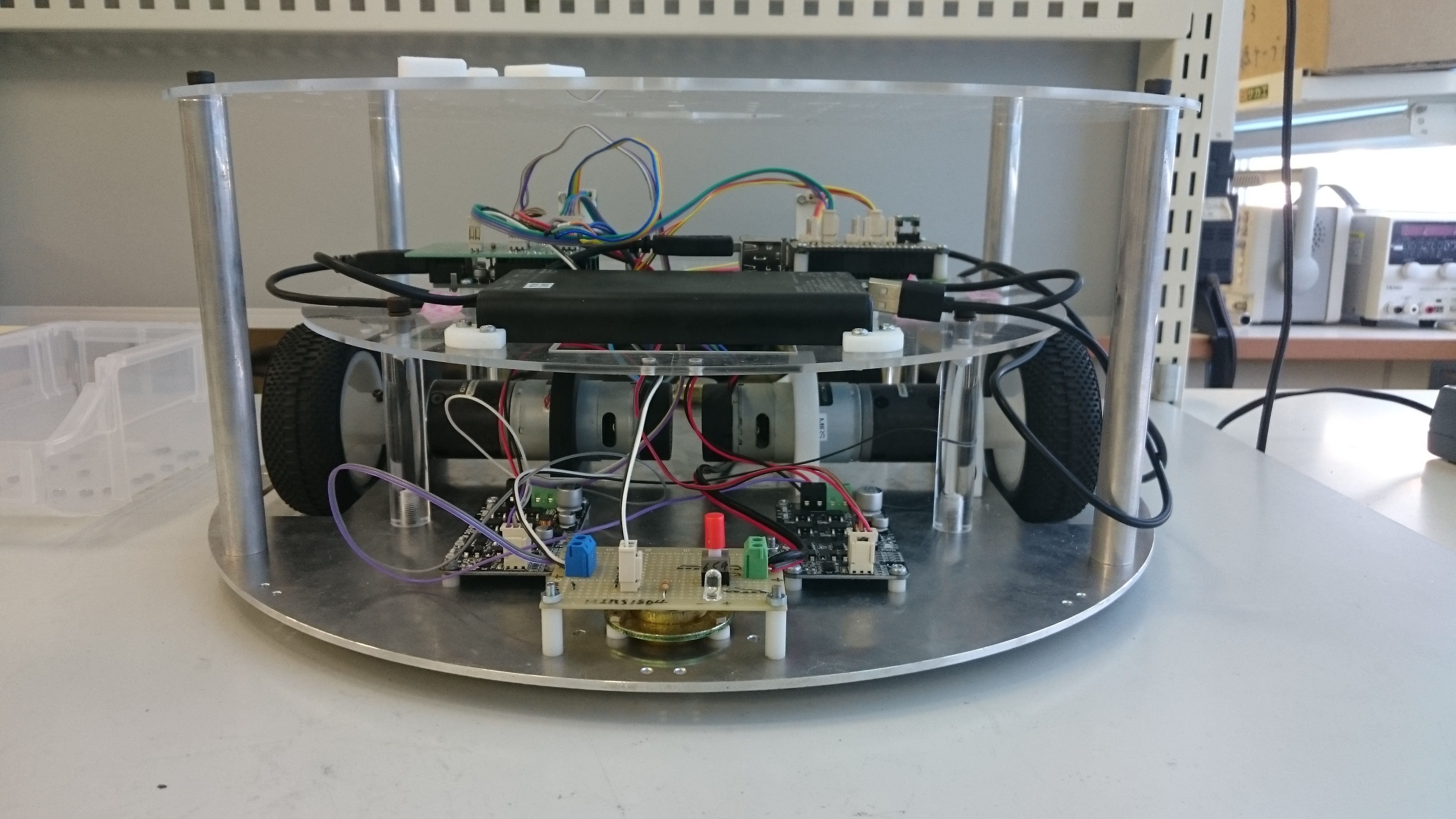
Fig.17 標準機機体(後ろから)
5.2 動作確認
RaspberryPi と Arduino のシリアル通信を参考にArduinoとRaspbrry Piの通信を行った。
モータはギア比1:27のものを用いた。
接続はUSBケーブルで行い、Raspbrry Piでプログラムを実行し、動作テストを行った。
Raspbrry Piでプログラムを実行することでArduinoと通信し、モータが動作することが確認できた。
5.3 走行テスト
Raspberry Pi での動作試験を参考にtest_requestプログラムをコンパイル後、実行した。
クリエイティブラボの床(カーペット素材)でマス目に沿って走行させた。このとき、進行方向と平行にメジャーを床に貼り走行距離を測定した。
100cmの距離を指定し、98cm走行した。メジャーに沿って走らせることで真っ直ぐ走行することを確認した。
回転の動作に関して、180度、360度に角度を設定して回転動作の確認を行った。回転量が、180度ではおよそ5度、360度では10度ほど足りなかった。
5.4 ゲイン調整
クリエイティブラボの床(カーペット素材)でマス目に沿って走行させた。このとき、進行方向と平行にメジャーを床に貼り走行距離を測定した。また、マス目からのずれを測定した。
直進走行を実現するためにゲイン調整を行ったところ、直進を妨げない、がたつきが許容できる最大の値は15、がたつきがほとんどなく、直進もできているとみなせる値は10前後であった。どこまで値を下げたら直進が保証できるのかは、確認することは難しかった。
結果としては以上の通りだが、直進といっても完全な直進ができているとは言い難かった。その原因として、モーターの初動が微妙に異なることが挙げられる。左右のモーターの初動が異なることで機体の進行方向が傾く。これにより進行方向にずれが生じ走行距離が長くなるにつれほど顕著にずれが現れるようになる。
対策としては初動のずれを考慮して左右のモーターに異なる入力を与えることが挙げられる。
6.不具合報告
なし
MIRS DATABASE