はじめに
本ドキュメントは、MIRS1403が開発する予定であったオリジナルMIRS「G-MIRSAK」におけるソフトウェア詳細設計についてのドキュメントである。
尚、本ドキュメントにおける設計計画は実質的に廃止した。詳細については、以下を参照。
MIRS1403 ソフトウェア開発報告書
システム仕様
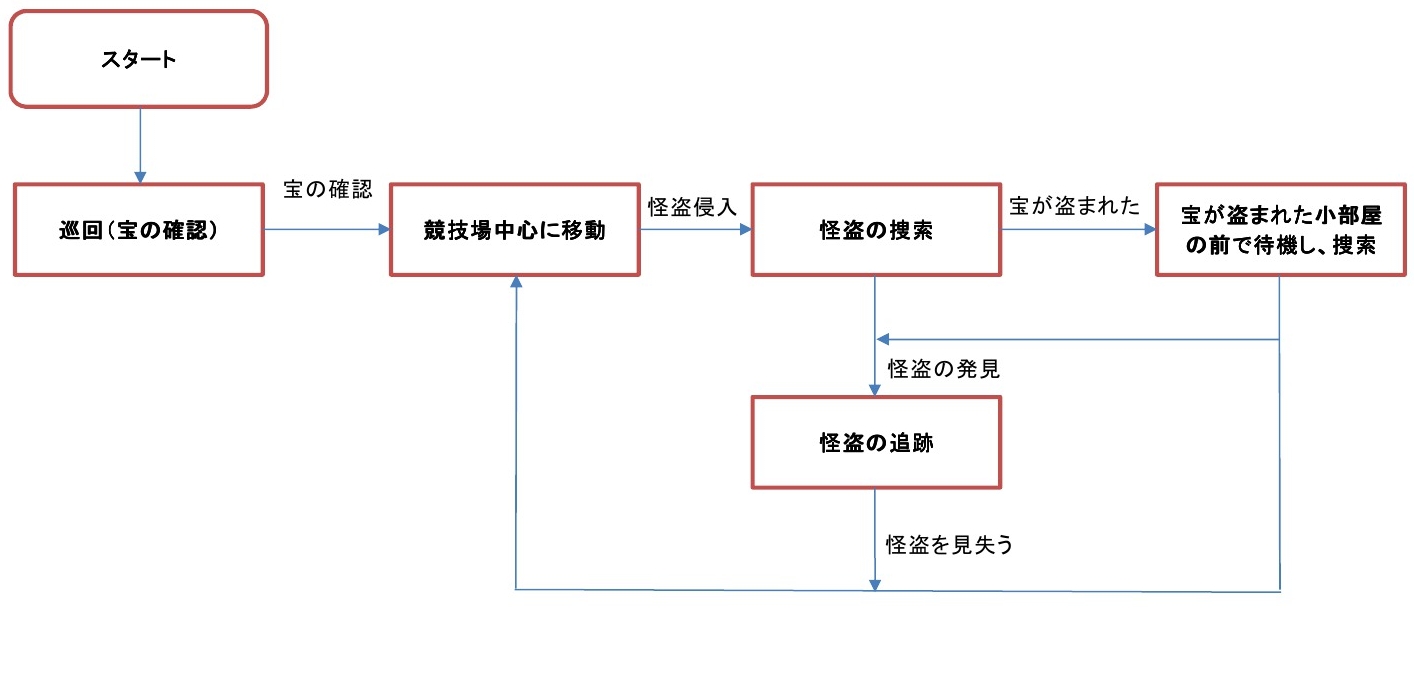
状態遷移図
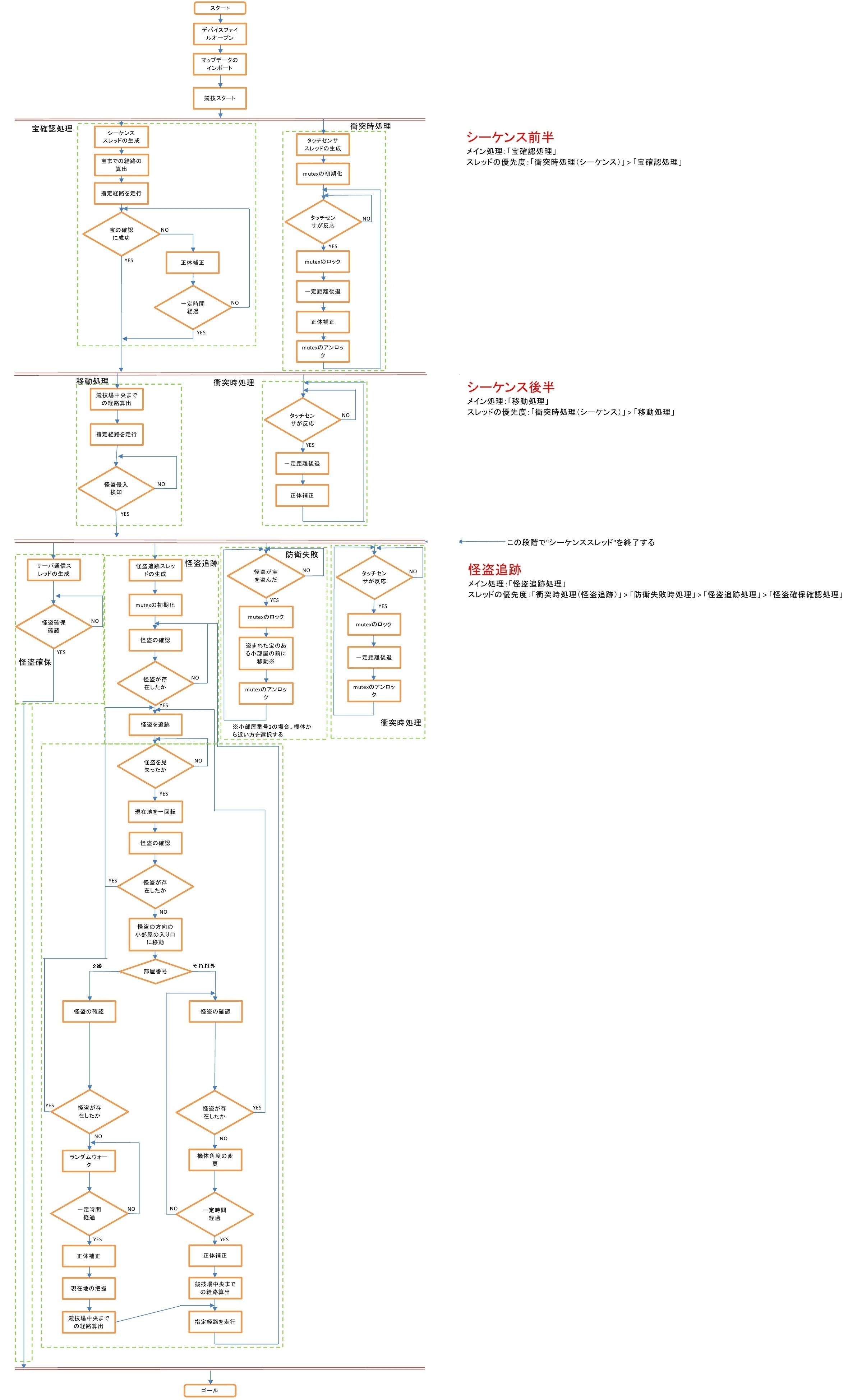
フローチャート
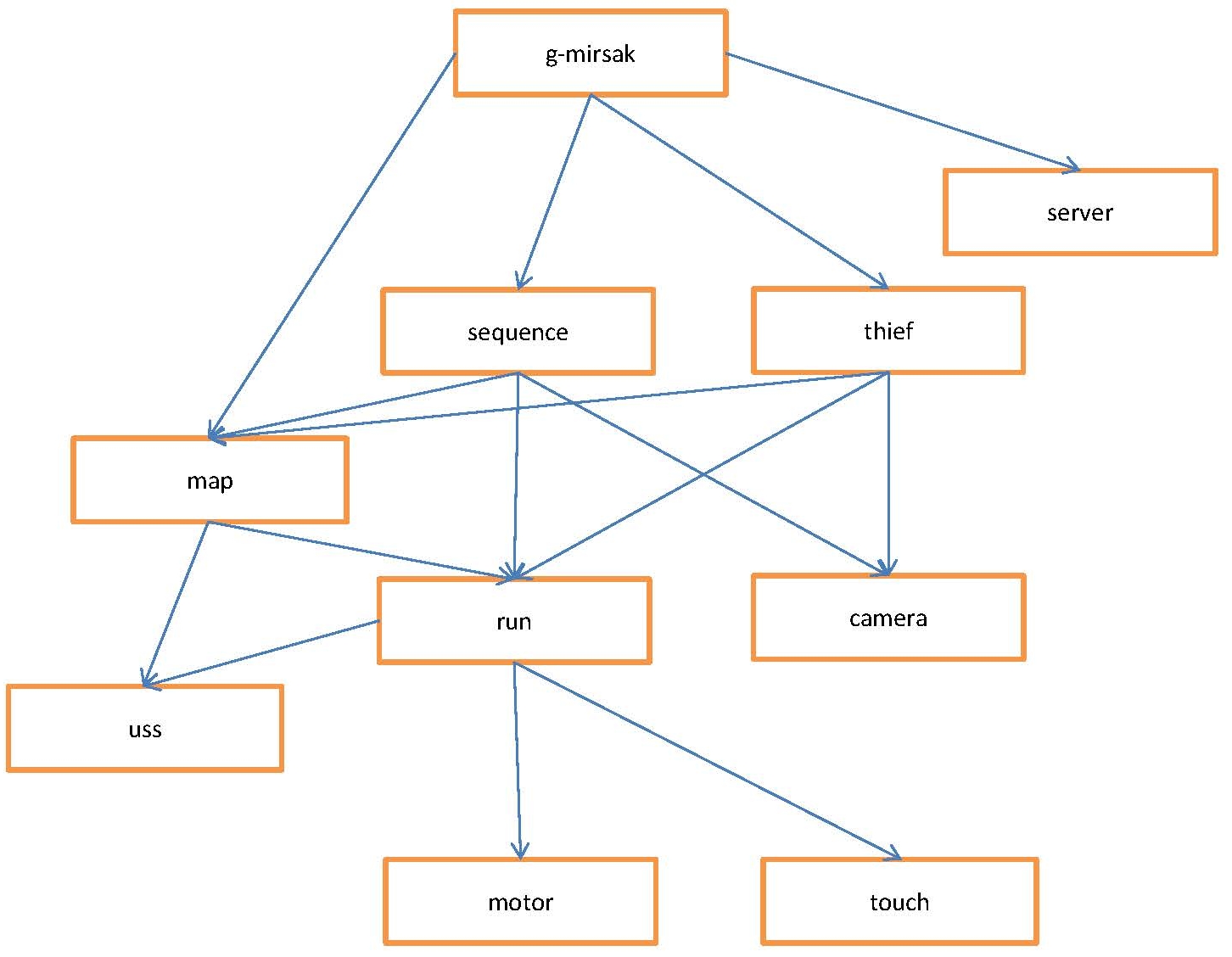
モジュール構成図
Makeファイル
新規作成する。デバイスドライバ
標準機のものから流用し、一切変更しない。
|
|
|
詳細については省略する。
モジュール一覧
作成するモジュールの概要を以下に列挙する。(詳細は個別ページ参照)
| モジュール名 | 用途 | 概要 | 依存モジュール | 担当 | 備考 |
|---|---|---|---|---|---|
| g-mirsak | 機能統合 | 各モジュールを呼び出し統合する。 | thief,sequence,map,server | 野澤、堀部 | |
| run | 走行制御 | 直進及び旋回を行う。 | motor,uss | 野澤 | |
| thief | 怪盗確保 | 怪盗発見後の追跡動作を行う。 | run,camera,map | 野澤 | |
| sequence | 最初の動作 | 最初の小部屋へ行き宝を確認する。 | run,camera,map | 堀部 | |
| map | 地図情報管理 | 競技場データのインポート、ルート計算を行う。 | run | 堀部 | |
| camera | 画像処理 | 怪盗およびDBの判断を行う。 | 無し | 野澤 | |
| uss | 超音波センサ管理 | 超音波センサボードの処理を行う。 | 無し | 野澤 | |
| touch | タッチセンサ管理 | タッチセンサの管理を行う。 | 無し | 野澤 | |
| motor | モータ管理 | モータの管理を行う。 | 無し | 野澤 | |
| server | データの送受信 | サーバとのデータの送受信を行う。 | 無し | 堀部 |
統合プログラム
統合プログラムについては、以下を参照。
MIRS1403 ソフトウェア開発報告書
MIRS1403ドキュメント管理台帳