| 名称 | MIRS1701 標準機製作報告書 |
|---|---|
| 番号 | MIRS1701-REPT-0001 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A2 | 2018.02.25 | 藤田 将史 | 小谷 進 | 第二版 |
本ドキュメントは,MIRS1701標準機の製作報告書である。
製作物、製作担当者を示す。
| 製作物 | 製作担当者 |
|---|---|
| 電源ボード | 小比田,藤田 |
| Rasberry pi | 鈴木,海野 |
| Arduino | 杉本,坂下 |
| シャーシ | 関原,大村 |
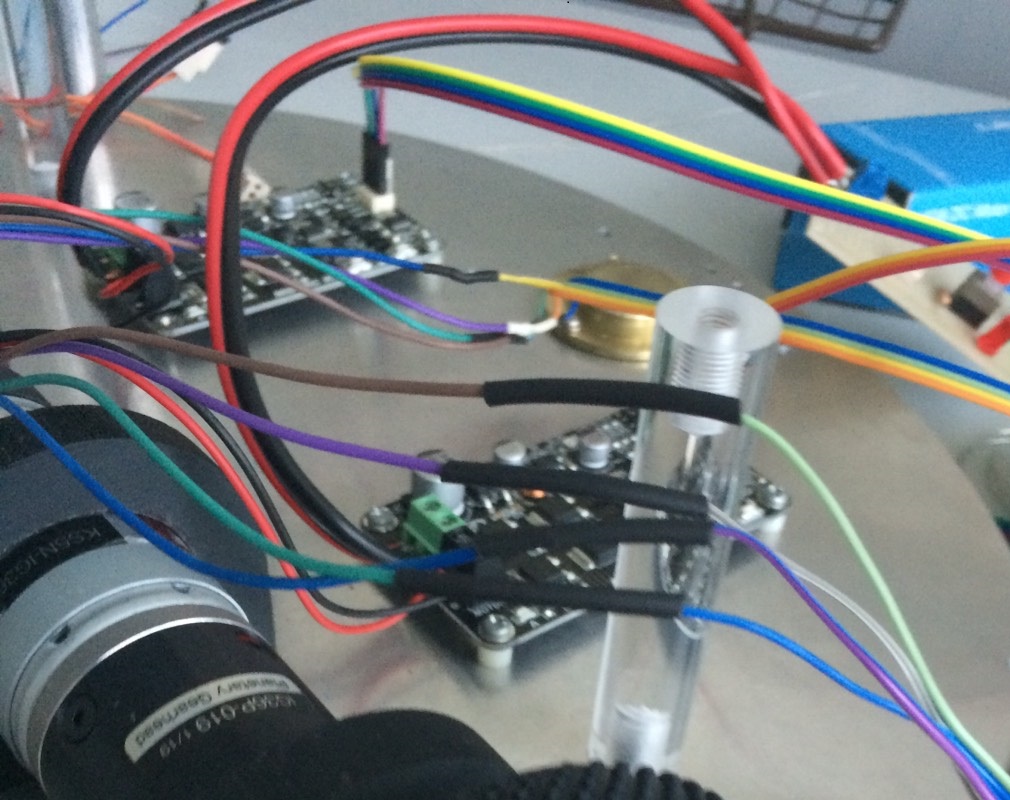
のようにモータのケーブルをを4pinコネクタに接続した。
モータとコネクタの両方のケーブルの被覆を剥がし、導線を露出させ、露出した部分をねじってはんだ付けした。このとき、ケーブルをねじって接続する前に熱収縮チューブをケーブルの中に通しておき、はんだ付けの後、被覆されていない部分を熱収縮チューブで覆い、ライターで炙り被覆した。
モータの入出力ケーブルとそれに対応するピンが導通するかをテスターで確認した。 チェックはFLUKE 107 600V CATⅢ MULTIMETERの導通チェックモードで行った。 抵抗が70Ω未満の場合、継続的にビープ音が鳴り、短絡であることを示す。
の回路図の通りに回路を作成した。
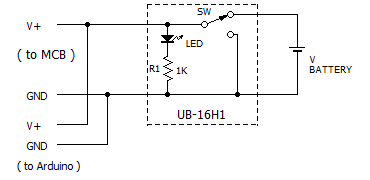
電源ボード基板の回路の導通チェックをテスターで行った。
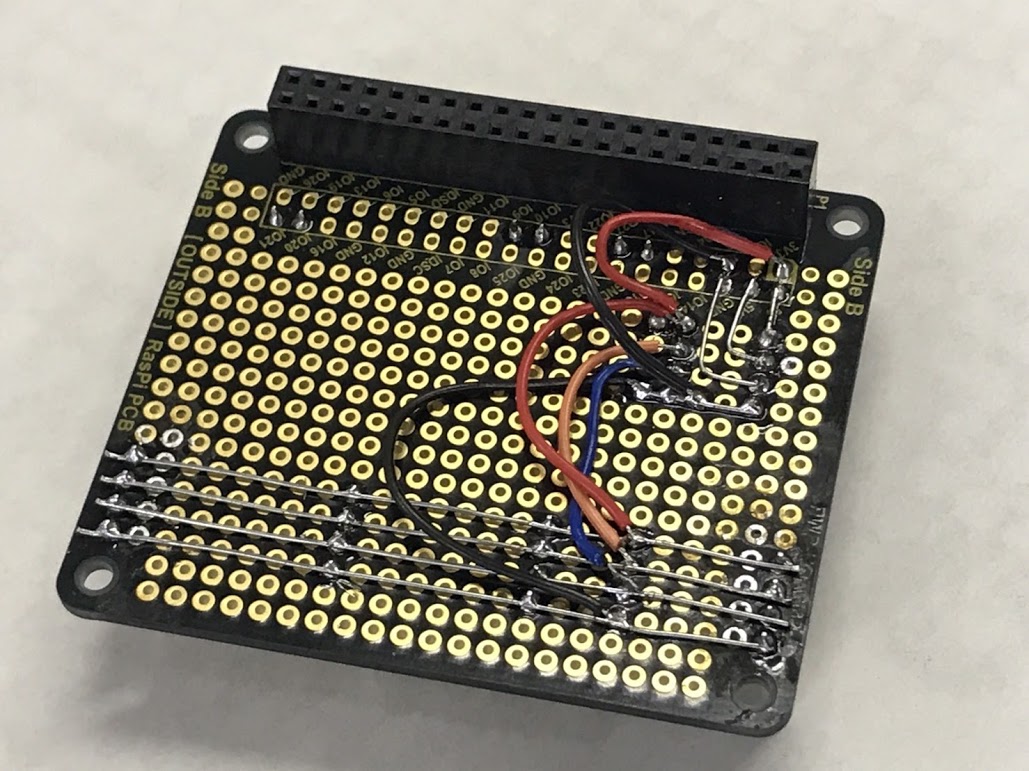
Arduino のセットアップとデバイス接続 を参考にデバイスとの接続に使うユニバーサル基板の作成を行った。実装図を , に示す。
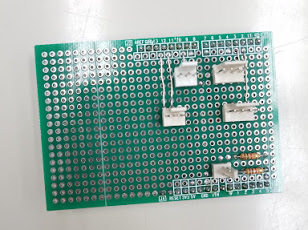
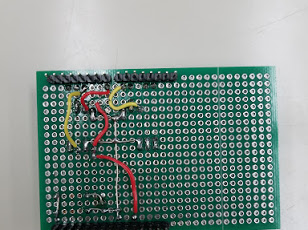
実装後は全ての配線について導通・非導通の導通チェックをテスターで行った。
タッチセンサ等の ON/OFF IOデバイスの接続するGPIO ピンに対して、インプットモード指定およびプルアップ設定を行った。
RaspberryPiとデバイスとの接続にはRaspberryPi用ユニバーサル基板UB-RPI02を用いた。 超音波センサ接続に必要なI2Cレベル変換器もこのユニバーサル基板上に実装した。
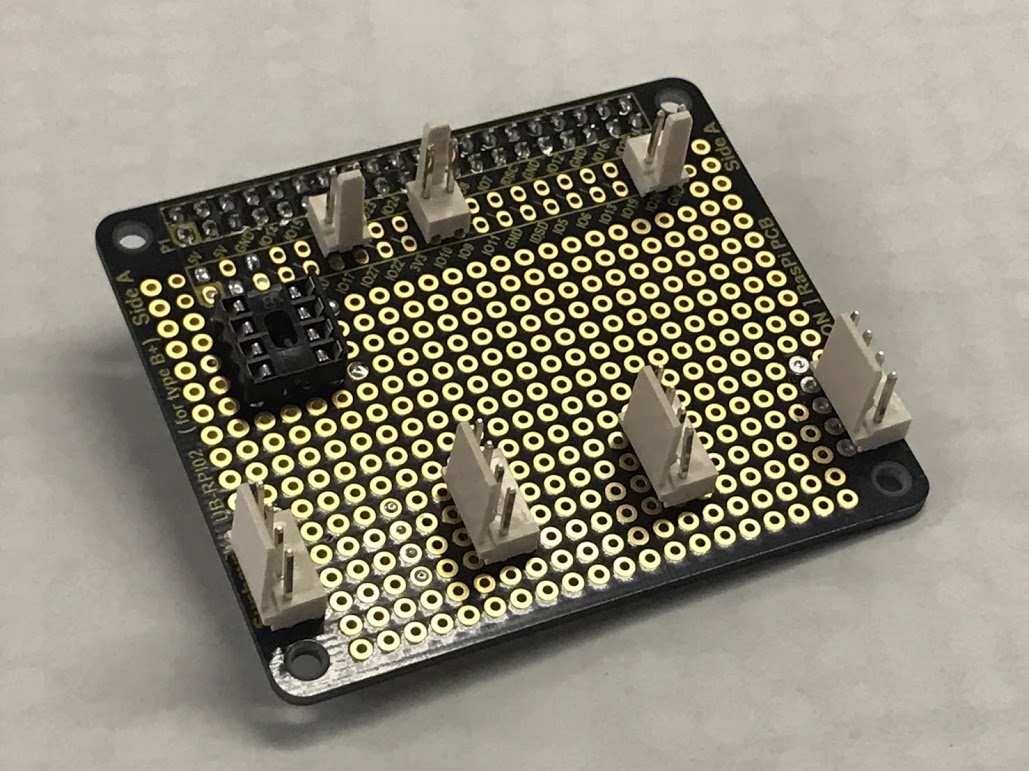
超音波センサをジャンパワイヤでRaspberryPiユニバーサル基板に接続した。
複数の超音波センサを使用する場合は、センサのそれぞれのアドレスを他と異なる I2C アドレスに付け替える必要がある。 超音波センサ Devantech SRF02 の初期の I2Cアドレスは 0xE0 (7bit仕様では 0x70 )となっているが、以下にその変更手順を示す。
i2cdetect コマンドでアドレスを確認した。
i2cset コマンドでアドレスを変更した。以下のコマンドを入力した。
標準機を組み立てるにあたり以下の加工作業を行った。
・長支柱、短支柱のタップ加工
3Dプリンタで作成した支柱(各2個)は上下2か所にタップ下穴が開いているので、M5タップ加工した。
・下段シャーシへの電源ボード固定穴加工
加工済みの下段シャーシは本来上下反転して使用することを考えていたため、電源ボード固定穴が前方向のみに空いていた。
前方に開けてある穴の位置を参考に、Φ3.2の穴を4か所開けた。
標準機組み立てに使用した、ねじ・スペーサをに示す。
| 名称 | 用途 | 長さ[mm] | 個数 | ワッシャーの有無 | ナットの有無 |
|---|---|---|---|---|---|
| M5キャップボルト | モータマウント固定 | 12 | 8 | 有 | 無 |
| 短支柱固定 | 12 | 8 | 有 | 無 | |
| 長支柱固定 | 12 | 8 | 有 | 無 | |
| M3ねじ | ギアヘッド・モータマウント接続 | 15 | 8 | 有 | 無 |
| 駆動用バッテリーホルダ固定 | 15 | 8 | 無 | 有 | |
| 制御用バッテリーホルダ固定 | 12 | 8 | 無 | 有 | |
| 超音波センサマウント固定 | 12 | 4 | 無 | 有 | |
| 超音波センサ固定 | 20 | 4 | 無 | 有 | |
| Arduino固定 | 12 | 3 | 無 | 有 | |
| モータドライバ固定 | 12 | 8 | 無 | 有 | |
| 電源ボード固定 | 26 | 4 | 無 | 有 | |
| M2.6ねじ | Raspberry Pi固定 | 30 | 4 | 無 | 有 |
| キャスター固定 | 10 | 6 | 有 | 有 | |
| スペーサ | Arduino固定 | 5 | 3 | ||
| モータドライバ固定 | 5 | 8 | |||
| 電源ボード固定 | 10 | 4 | |||
| Raspberry Pi固定 | 10 | 6 | |||
| 超音波センサ固定 | 5 | 4 |
以下の手順に従って、駆動部の組み立てを行った。
以下の手順に従って、制御部の組み立てを行った。
上段シャーシと長支柱をM5キャップボルトで固定した。組み立て後の写真を に示す。
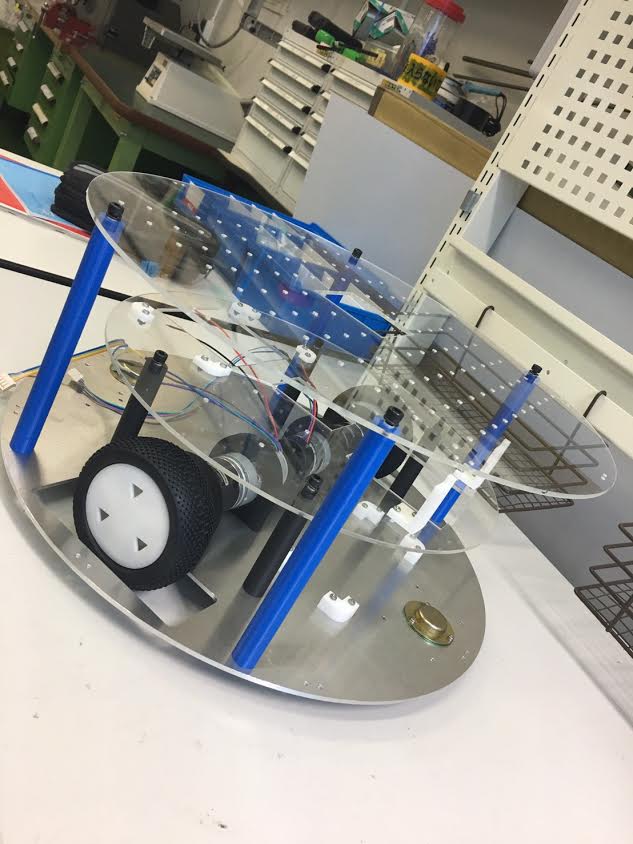
長支柱を3Dプリンタ製からアルミ製の物に交換した。
交換後の写真をに示す。
標準機の駆動用バッテリーホルダがバッテリーと干渉していた。
そのため干渉しないバッテリーホルダを設計し、3Dプリンタで出力した。
設計図のPDFファイルのダウンロードリンクを下に示す。
バッテリホルダ-11
バッテリホルダ-21
バッテリホルダ-1
バッテリホルダ-2
バッテリーホルダシャーシ組図
取り付けた後の写真をに示す。
Arduino単体での動作試験 を参考に、Arduino単体での動作試験を行った。
Raspberry Piでの動作試験
に従って、Raspberry Piの動作試験を行った。
以下のテストプログラムを実行して、動作を確認した。
| 実距離(cm) | 右センサ計測距離(cm) | 左センサ計測距離(cm) |
|---|---|---|
| 10 | -1 | -1 |
| 20 | 28 | 28 |
| 30 | 38 | 38 |
| 40 | 48 | 38 |
| 50 | 58 | 58 |
| 60 | 68 | 68 |
| 100 | 108 | 108 |
| 140 | 146 | 146 |
| 150 | 156 | 152 |
以下に示す手順で標準機の統合試験を行った。
ケーブルの接続 を参考にして、標準機の組み立てを行った。
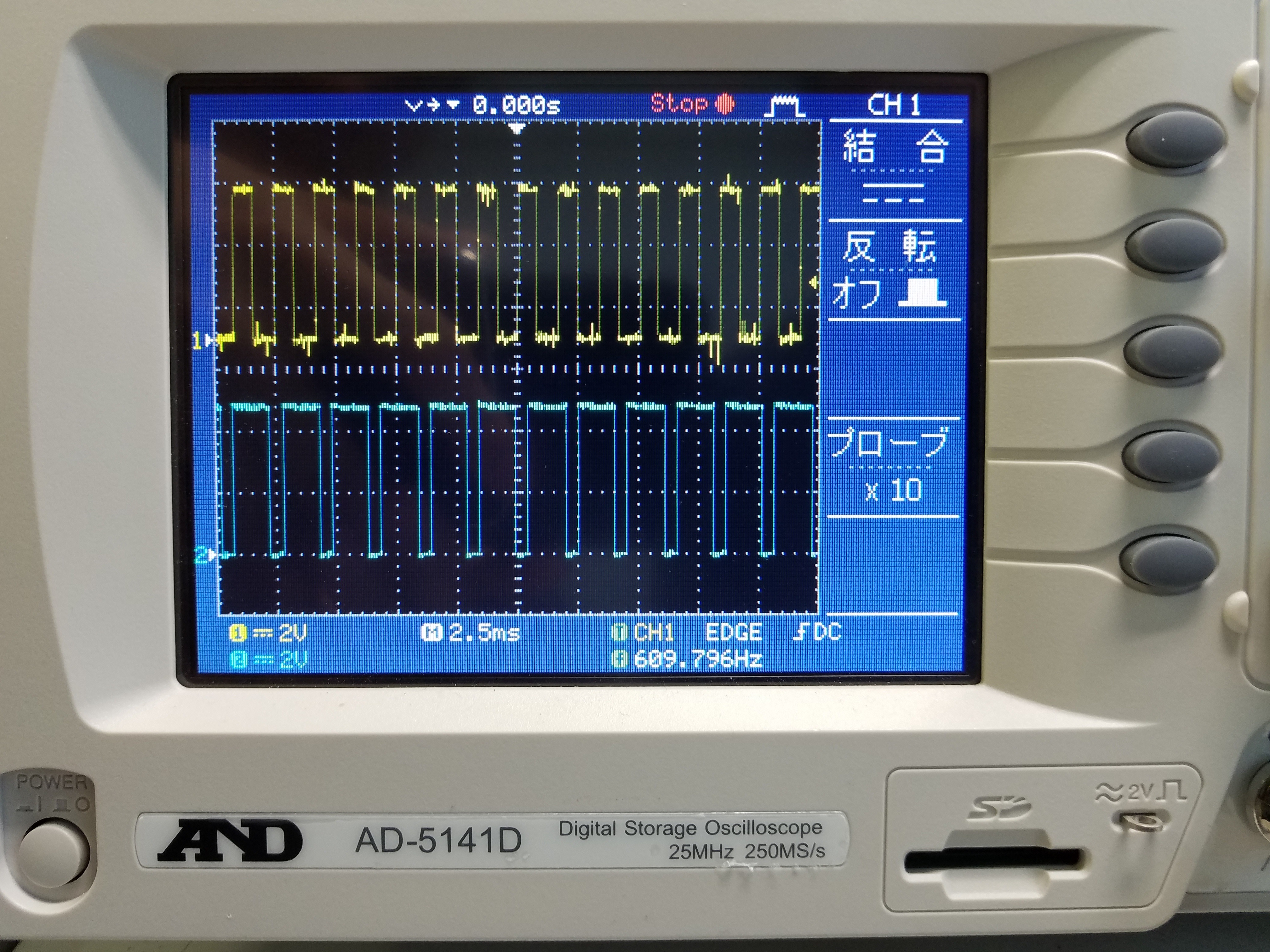
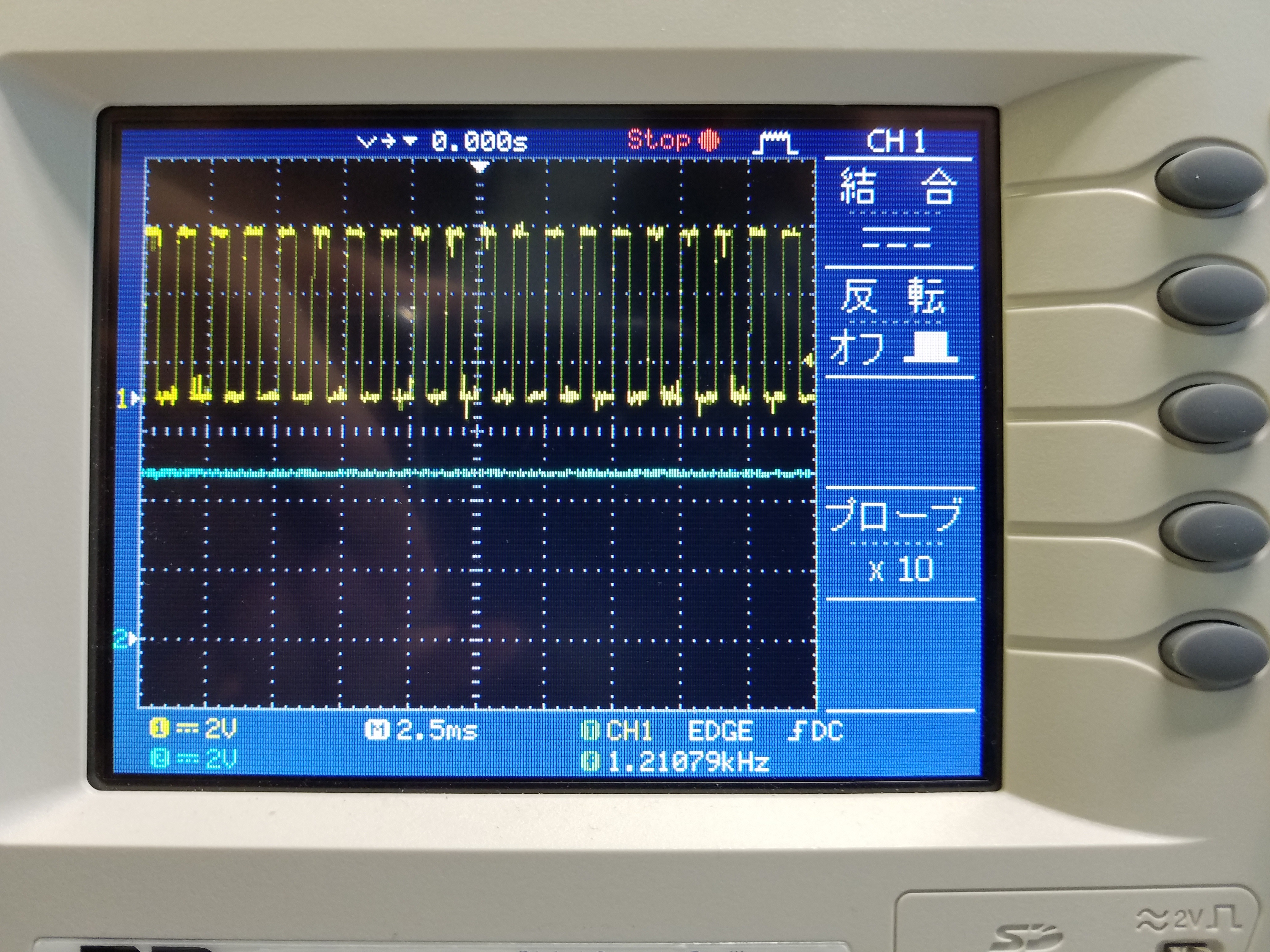
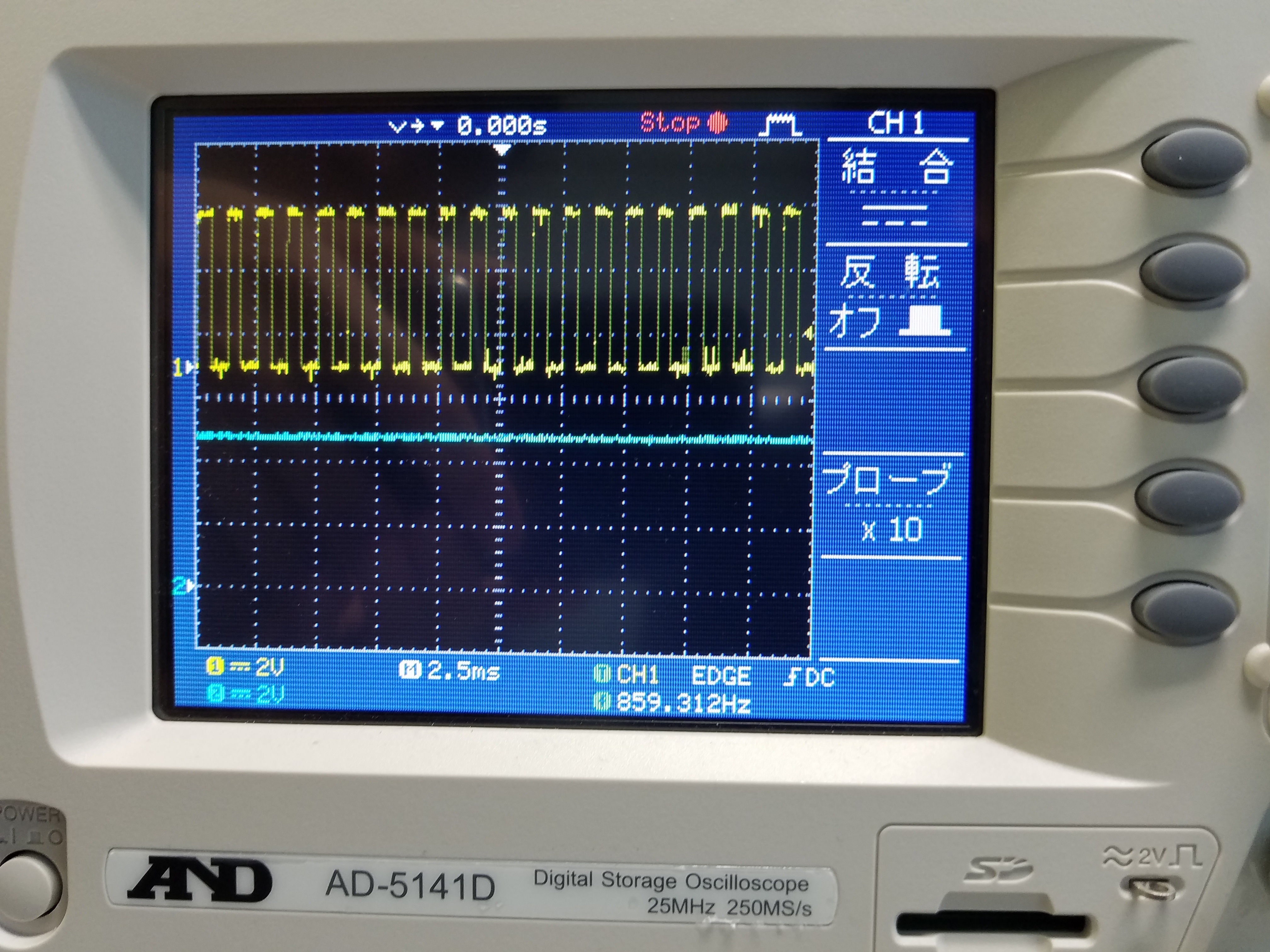
ArduinoとRaspberry Piの通信を行った。
Raspberry Pi での動作試験
からダウンロードしたコンパイル済みのテストプログラムtest_requestを実行し、実動作を確認した。
test_requestの標準プログラムでは RaspberryPiからArduino側には走行指令、ArduinoからRaspberryPi側にはバッテリー電圧や走行状態を送ることができる。
実行の結果、プログラムの通りに直進走行、旋回し、ArduinoからraspberryPiに状態が送られることをを確認できた。
Arduinoソースコードにある直進制御のPゲインKsを変更して直進できるように調整した。
距離4m、速度30cm/sで調整した。
Ks>20のとき、機体が震えながら走行した。
Ks≦20のとき震えが止まったが、機体がやや左に曲がる走行になった。
Arduinoソースコード内のdefine.hにある左タイヤに対する右タイヤの回転比L_R_RATIOを1.005に変更し、Ks<20の範囲で直線走行できるようになった。
デフォルトのL_R_RATIO値では機体が曲がってしまったのは、モータの回転とタイヤの進む距離の比が左右で異なるからだと考えられる。
最終的にKsは20とした。
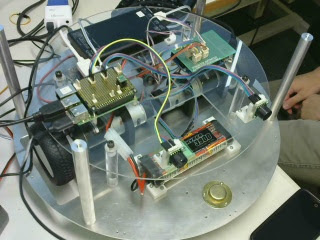
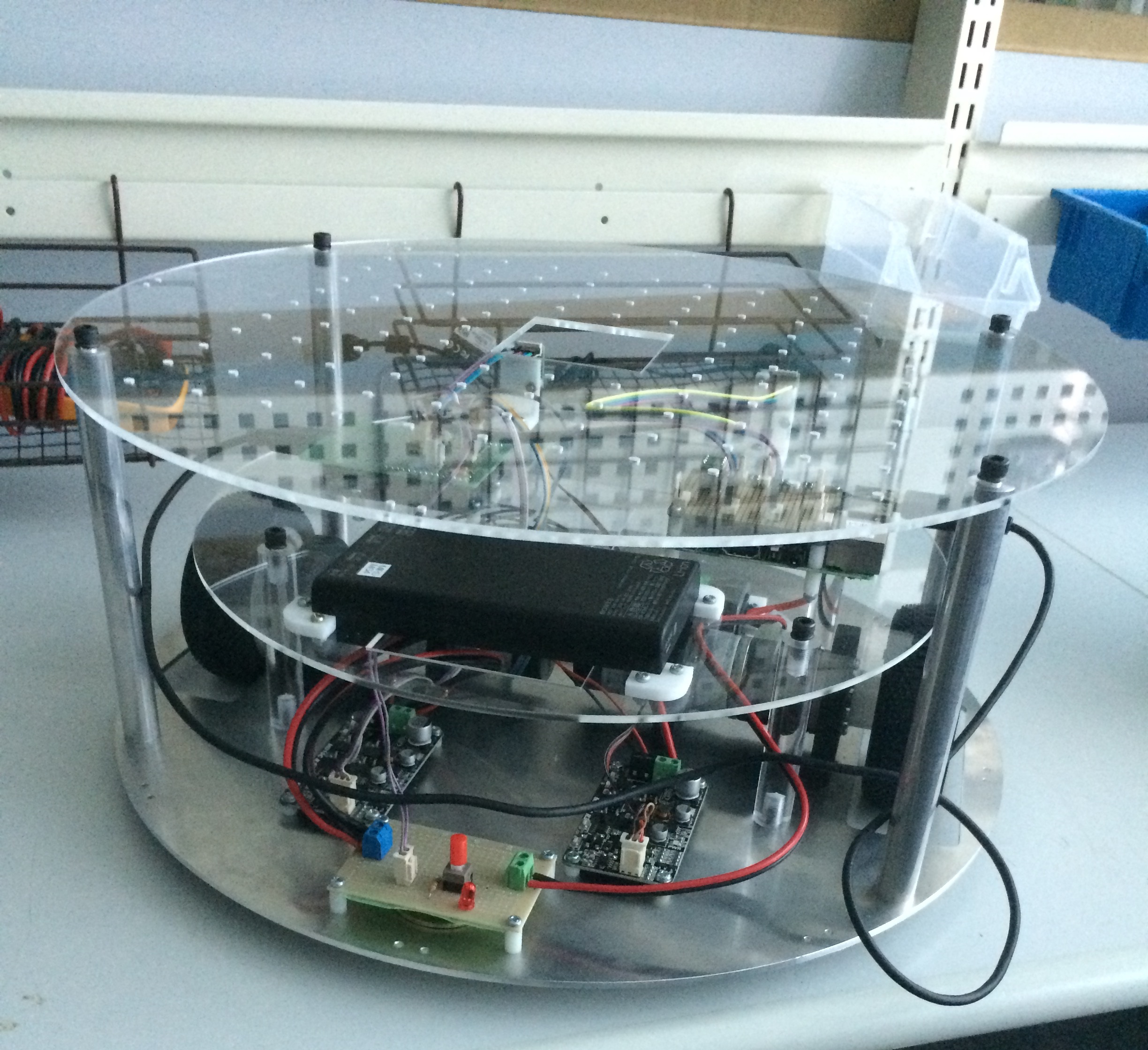
以上のとおり製作し、標準機が完成した。完成図をに示す。
標準機作成の際に起こった不具合を報告する。