| 名称 | MIRS1504 エレクトロニクス詳細設計書 |
|---|---|
| 番号 | MIRS1504-ELEC-0001 |
最終更新日:2015.12.14
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2015.12.07 | 勝又隆博 | 初版 | |
| A02 | 2015.12.14 | 勝又隆博 |
ドータボードの回路図を追加。 変更後に製作する新規ケーブルの数とケーブルに関するリンクを追加。 |
|
| A03 | 2015.12.14 | 勝又隆博 |
LEDモジュールに関するリンクを追加。 ドーターボードの変更を追加。 |
本ドキュメントでは、以下に示す工学用語を()内の略称で示す。
•Central Processing Unit(CPU)
•Field Programmable Gate Array(FPGA)
•Light Emitting Diode (LED)
•Micro Intelligent Robot System(MIRS)
•Universal Serial Bus (USB)
•World Wide Web (Web)
MIRS1504は、2016年1月30日に開催されるMIRSAK競技会において、競技攻略のために必要な機能の変更点をMIRS1504 システム提案書に挙げた。
今後、MIRS1504のエレクトロニクス班が作業する項目について、競技攻略の方針と関連付けるために、変更箇所一覧表とボードの関係図を以下に示す。
現在のエレクトロニクス構成の変更箇所一覧をTable1に示す。
| 変更箇所 | 目的・理由 | 担当者 |
|---|---|---|
| 赤外線受信モジュールを設置する。 (赤外線受信制御ボードを製作する。) |
怪盗機から発せられる赤外線を受信して怪盗機を発見するため。 | 大石・水溜 |
| 機体の左側に、左向きのWebカメラを設置する。 |
怪盗発見後、迅速に追跡動作に入るため。 MIRS1403 MIRS2015向けMIRS1403解体報告書用備考 に記述されているWebカメラを使用する。 |
勝又・佐野 |
| 超音波センサをMIRS1403から引き継いだもの×4(パララックス社#28015)に変更する。 |
動作が安定化し、壁との距離が3cm~335cmまで測定可能になるので現在の超音波センサよりも性能が良いため。 MIRS1403 超音波センサボード詳細設計書に記述されている超音波センサを使用する。 |
勝又・佐野 |
| 機体の後部にタッチセンサを3つ設置する。 |
プレ競技会では前方のみしか必要なかったが今回は後ろの壁も検知できるようにするため。 標準部品のタッチセンサを使う。 |
勝又・佐野 |
| ドータボードを製作する。 |
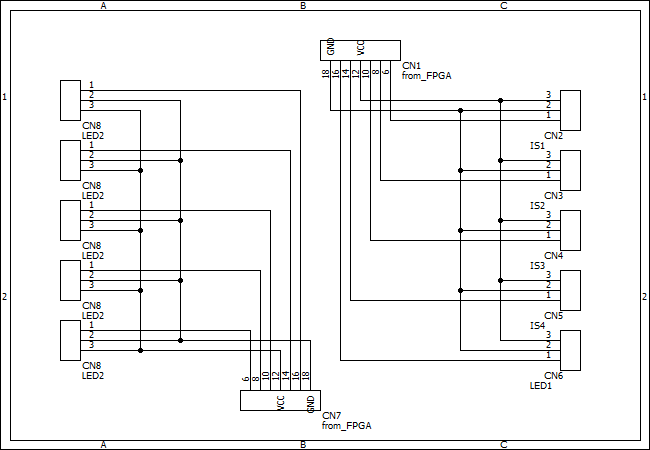
モジュールを増設するとMIRSMG3G ドータボード詳細設計書 5.実装図にあるスター型のドータボードではポート数が足りないため。 MIRS1504が製作するドータボードは、タッチセンサ6個、赤外線受信モジュール8個、LEDモジュール1個の合計15ピンを振り分けたポートを用意する。 標準部品のドーターボードと追加で作成されるドータボードを2段構成にする。 追加で製作されるドータボードは、赤外線受信制御ボードとLEDボードを接続するのでポート数を10個用意する。 追加で製作されるドータボードは、MIRSMG3G ドータボード詳細設計書 5.実装図にあるスター型のドータボードを参照して製作する。 Fig.1にドータボードの回路図を示す。 |
佐野 |
| 外装にLEDモジュールを設置する。 |
観客に魅せるため。 MIRS1403 LEDボード詳細設計書に記述されているLEDテープを使用する。 MIRS1403 LEDボード詳細設計書を参照して製作する。 Fig.2にLEDボードの回路図を示す。 |
三室 |
| 変更箇所に必要な新規ケーブルを追加する。 |
変更箇所に対応するケーブルを製作する。 また、現在のケーブルは長さが適切でなく配線が絡まってしまうので適切な長さに調整する。 超音波センサのケーブルはMIRS1403 超音波センサボード詳細設計書にある実装図を参照して製作する。 超音波センサ以外のケーブルは自作する。 |
各自 |
Table1の変更箇所にあるドータボードの回路図をFig.1に示す。
|
|
Table1の変更箇所にあるLEDの回路図をFig.2に示す。
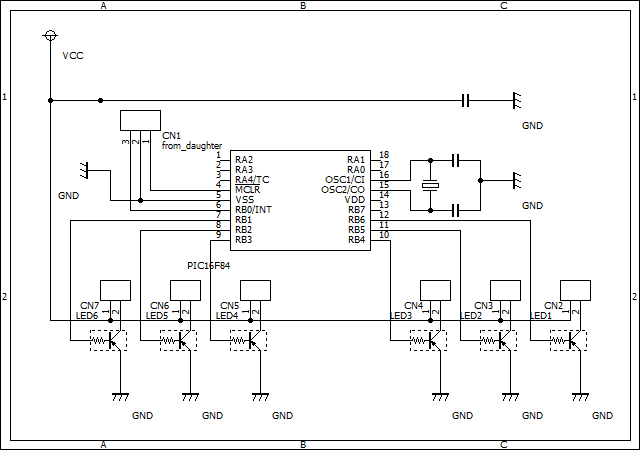 |
Table1の変更箇所にある必要な新規ケーブルと数をTable2に示す。
| 必要なケーブル | 数 |
|---|---|
| ドータボードと赤外線受信制御ボードを接続するケーブル。 | 8 |
| 赤外線受信制御ボードと赤外線受信モジュールを接続するケーブル。 | 8 |
| ドータボードとLEDボードを接続するケーブル。 | 1 |
| 超音波センサボード上でシリアル通信ドライバとPIC16F630を接続するケーブル。 | 2 |
変更後のボードの関係図をFig.3に示す。
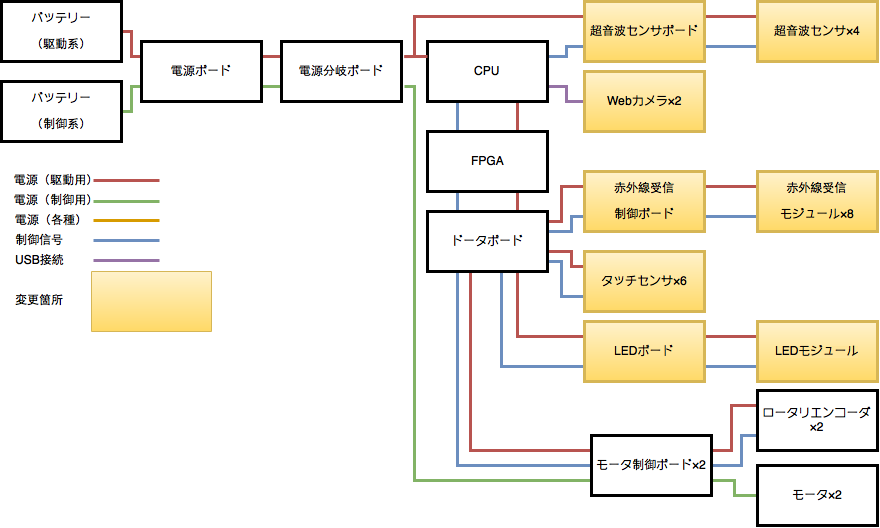 |
MIRS1504が新規に導入する各基板の詳細設計書へのリンクをTable3に示す。
| 詳細設計書の名称 | 概要 | 担当者 |
|---|---|---|
| 赤外線受信制御ボード詳細設計書 | 赤外線受信制御ボードを製作し、赤外線受信モジュールを設置する。 | 大石 |
各ボードの詳しい項目については、リンク先の各詳細設計書を参照。
以上でエレクトロニクス詳細設計書の終わりとする。