| 名称 | MIRS1504 赤外線受信制御ボード詳細設計書 |
|---|---|
| 番号 | MIRS1504-ELEC-0002 |
最終更新日:2015.12.07
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2015.12.10 | 大石 | 初版 | |
| A02 | 2015.12.16 | 大石 | 大林先生 | 機能概要について詳しく説明するために図と説明を加えた。 |
本ドキュメントは、MIRS1504の赤外線受信制御ボード詳細設計書である。
怪盗機から発せられる赤外線を受信して怪盗機を発見するために、赤外線受信モジュールを搭載する。
赤外線受信モジュールの信号をドーターボードに送る赤外線受信制御ボードを作成する。
赤外線受信モジュールは、8方向にダイセン電子工業のシングルパルスボールセンサーを搭載する。
怪盗機から発せられる赤外線を受信し、怪盗機の方向を特定するために、
8個の赤外線センサーから与えられるアナログ信号が閾値を超えているかを判断し、
超えていれば'1'を、超えていなければ'0'をドーターボードに送る。
| 記号 | 部品名 | 型番/値 | 数量 |
|---|---|---|---|
| 3PINソケット | MOLEX 483-8477 | 16 | |
| DILソケット | DILソケット 18pin | 1 | |
| IC1 | PIC16F88 | PICマイコン PIC16F88 | 1 |
| ユニバーサル基板 | 片面ガラス・ユニバーサル基板 Cタイプ(72x47.5mm) めっき仕上げ | 1 |
•赤外線受信制御ボード
•赤外線受信モジュール
•CPU
•FPGA
•ドータボード
•テスター
•安定化電源(制御系)
•はんだごて
•はんだ
•はんだ吸い取り線
•はんだ吸い取り器
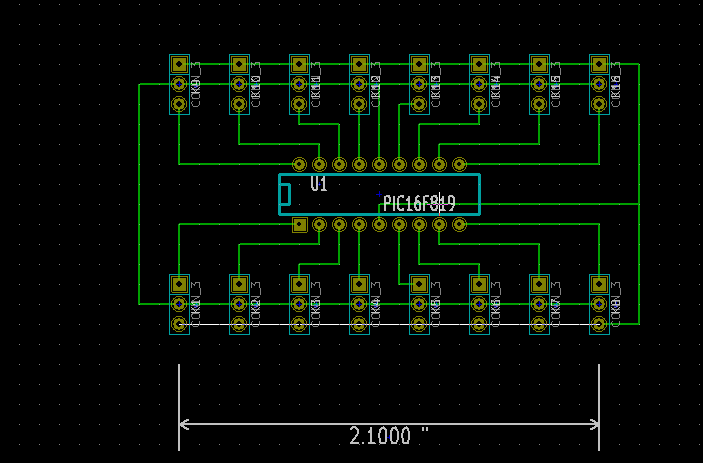
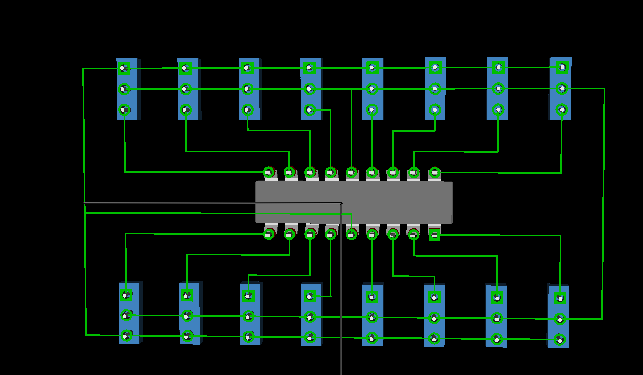
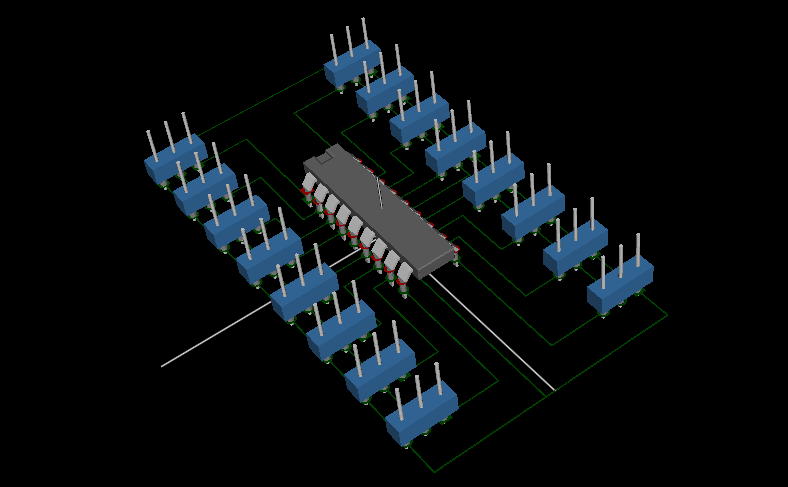
Fig.2,Fig3の実装図を照らしあわせ目視で確認する。チェック時には部品の位置と向きに注意する。
仕様と異なる場合は、部品を規定の位置に付け直す。はんだ付けの繰り返しにより、基板のランドが複数箇所、剥がれて素子がつけられなくなった場合は基板を作り直す。
赤外線受信制御ボードとFig.2のパターン図を照らし合わせ、テスターを使用し各素子が繋がっているかとVCCとGNDが短絡してないかを確認する。
また、はんだ付けやビニール線による回路の修正が行われている場合は、修正箇所が正しく機能していることを確認する
回路のパターン図を印刷し、テスターで確認したところをパターン図にしっかり印を付ける。
もしも導通していなかったらビニール線などで直接つなぐ。短絡していたらはんだを付け直すか、接触部分を削る。ビニール線をつけられなくなった場合とはんだ付けの繰り返しにより、基板のランドが複数箇所剥がれて素子がつけられなくなった場合は基板を作り直す。
•すべての赤外線受信モジュールが赤外線に反応することを確認する。
•赤外線受信モジュールと赤外線受信制御ボードをMIRSに搭載した状態で、赤外線発信機から赤外線を受信し、発信機がある方向へと機体の方向を転換し移動することを確認する。
赤外線受信制御ボードの最低限の仕様は赤外線モジュールが受信した信号を"1"と"0"に判別することである。
今後、赤外線モジュールからのアナログ信号をデジタル信号に変換することを考えている。
そのためには現在の基板ではA/D変換できるポートが7つのみなので、8つの赤外線モジュールをA/D変換するために、
この基板をさらに1枚追加するか、PICをPIC16F88から大きなサイズのPICに変える必要がある。