はじめに
本ドキュメントは、競技攻略のためのMIRS1504機体のシステム提案書である。
目的
本ドキュメントの目的は、2016年1月30日に開催されるMIRSAK競技会において、競技攻略のために必要な機能の変更点およびそれに付随する問題点を検討し今後のシステム開発につなげることである。
チームコンセプト
紫電一閃
~momentary phantasm~
剣を振るうような正確性かつ圧倒的な速さで完全勝利を目指す。また剣は命を預けるものであることから、優れたメンテナンス性も兼ね備えている。
走行コンセプト
ロータリエンコーダや超音波センサによる正体補正を用いて、
出来るだけ速く確実に怪盗を捕まえにいく。
動作シナリオ
現場急行

fig.1 現場急行上の図がMIRSが現場急行するときのルートである。
それぞれの動きを説明すると以下のようになる。①直進 → ②回転 → ③正体補正 → ④直進 →
→ ⑤正体補正 → ⑥数字認識 → ⑦回転 → ⑧直進直進しているときはロータリーエンコーダを使用し正確な距離を走行、さらに回転の際は
超音波センサ、ロータリーエンコーダを使用し正体補正を行うことで非常に正確な走行が
可能となっている。
この正確性に速さをプラスし、迅速に現場へと駆けつける。怪盗確保
展示室に入場したら前方と左側のカメラで怪盗機を捜索する。
(1)前方に怪盗機を確認
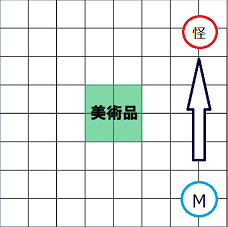
fig.2 作戦1直進しながら赤外線センサを用いて怪盗を捜索する。
8方向につけた赤外線センサで敵の方向を16分割する。
敵に向かってすばやく攻撃する。(2)左側に怪盗機を確認
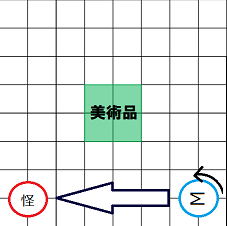
fig.3 作戦2左に90°回転する。
回転後(1)と同じ動きをする。(3)怪盗機が確認できない場合
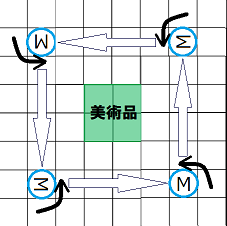
fig.4 作戦3巡回ルートの角まで直進する。
左に90°回転する。
前方と左側のカメラで怪盗機を捜索する。
システム概用
今回の競技内容について、
競技攻略に必要な機能をMIRS1504班内で次のように考えた。
まず、MIRSは基本的な動作(直進、回転等)を行える必要がある。これについて必要な機能を表1に示す。
そして競技の性質上、数字を認識する機能と、怪盗機を認識し確保する機能が必要である。これについて必要な機能を表2に示す。
又、競技会は、多数のお客さんに見て楽しんでもらうのも大きな目的の一つなので、
娯楽性のある機能をMIRSに追加する必要がある。これについて必要な機能を表3に示す。
以上よりMIRSに必要な機能を次のようにまとめた。
- すばやく必要量走行する機能
- 必要量回転する機能
- 数字認識を行う機能
- 正体補正を行う機能
- 怪盗を認識する機能
- 娯楽性のある機能
このうち機能1~4は、標準機に搭載されている機能であるが、
競技会のルールに適した機能にする際に、変更点が生じた為改めて記載した。
また、これらの機能は、メンテナンス性の向上が必要である為、機能要求として表4に記載した。
これらの機能をMIRS1504は次のような方法で実現させる。
| 機能 | 実現方法 | 標準機からの変更点 | 担当者 |
|---|---|---|---|
| 直進走行 | 超音波センサやタッチセンサの情報を元に、直進走行を行えるようにする。 | 超音波センサを四つに増やす。設置場所は機体概形を参照。 | 原、三室、水溜 |
| 正体補正 | 前方部と右側の超音波センサ2機ずつで機体の壁との距離を測定する。 2機のセンサの値のずれを直して正体補正を行う。 直進中は右側の2機、数字認識するときは前方部の2機を使う。 | 超音波センサを市販のものに変更する。 設置場所は機体概形を参照。 | 原、三室、水溜 |
| 必要量回転を行う | ロータリエンコーダを用いて正確な回転を行う。 | 志村、大石、勝又 | |
| 画像処理 | 機体前方部、左側にそれぞれ設置予定のWEBカメラにより画像を撮る。 | 正面部に設置してあるカメラに加え左側にも新たにカメラを設置し、 計二つのカメラを設置する。具体的な設置場所は機体概形を参照。 | 川崎、佐野、勝又 |
| 機能 | 実現方法 | 担当者 |
|---|---|---|
| 怪盗の認識 | 怪盗機は赤色なので捜索中はカメラからの画像の中で、赤の色合いが大きい方へと移動する。 それ以降は、怪盗機から発せられる赤外線を検知して移動する。 | 川崎、志村、大石、佐野 |
| 機能 | 実現方法 | 担当者 |
|---|---|---|
| 外見に親しみを持ってもらう | バンパにデコレーションを施す。 | 鍵山、望月 |
| エレクトロ二カルパレード | 複数のLEDで派手な演出を行う。 | 勝又、佐野、三室 |
| 機能 | 実現方法 | 担当者 |
|---|---|---|
| メンテナンスのしやすさ | 標準機のときに使っているねじがいくつか長さがあっていないので丁度いい長さに変えて外見をよくする。 | 鍵山・望月 |
標準機からの変更点詳細
-
各担当の表は上から優先順位が高くなっている。
メカ
担当者 : 鍵山・望月
表5.メカの変更点及び目的 変更点 目的・理由 懸念される問題点 正確性 速さ メンテナンス性 捕獲 数字認識 娯楽性 シャーシに追加で穴を開ける。 各種センサを追加で搭載するため。 ボール盤を使って穴を追加で開けるのでマンパワーを割く必要がある。 ○ ○ ○ ○ ○ バッテリー置き場を作成する。 バッテリーの置き場を確保するため。 アクリル板やアクリル棒を加工するのでマンパワーを割く必要がある。 ○ USBハブを作成する。 USB端子をまとめるため。 アクリル板を加工するのでマンパワーを割く必要がある。 ○ ○ ○ ○ シャーシの後方にバンパとタッチセンサを3つ追加する。 後部にタッチセンサを追加することで後ろの壁を検知するため。 タッチセンサとドーターボードをつなぐケーブルが増えるため配線が絡まりやすくなる。 ○ ○ ○ 標準のタイヤをアルミホイールに変える。 タイヤが歪んでロータリーエンコーダの値がずれるのを防ぐため。 タイヤの取替えだけなので特にないと思われる。 ○ エレキ
担当者 : 佐野・水溜・大石・三室・勝又
表6.エレキの変更点及び目的 変更点 目的・理由 懸念される問題点 正確性 速さ メンテナンス性 捕獲 数字認識 娯楽性 赤外線受信ボード 怪盗機から発せられる赤外線を受信して怪盗機を発見するため。 一から作成し、動作試験も行わなければならないのでマンパワーを割く必要がある。 ○ 超音波センサーを引き継いだ市販品を4つ(パララックス社#28015)に変更する。 動作が安定化し、壁との距離が3cm~335cmまで測定可能になるので
現在の超音波センサよりも性能が良いため。
プログラムを作成する必要がある。
動作試験をやる必要があるのでマンパワーを割く必要がある。○ ○ カメラを正面のほかに左側に追加で設置する。 怪盗発見後、迅速に追跡動作に入るため。 画像処理が複雑化すると考えられる。 ○ ○ ○ タッチセンサを後部に3つ追加する。 プレ競技会では前方のみしか必要なかったが今回は後ろの壁も検知できるようにするため。 タッチセンサとドーターボードをつなぐケーブルを増やす必要がある。 ○ ○ ○ 新規ケーブル作成 現在はケーブルの長さが適切でないため配線が絡まってしまうので適切な長さに調整するため。 マンパワーを割く必要がある。 ○ LEDを使用した外装を作成する。 観客に魅せるため。 LEDを増やしすぎると眩しくなり消費電力が増大する。 ○ ソフト
担当者 : 川崎・原・志村表7.ソフトの変更点及び目的 変更点 目的・理由 懸念される問題点 正確性 速さ メンテナンス性 捕獲 数字認識 娯楽性 怪盗機を見つけたときの関数を作る。 怪盗機を確保するため。 処理に時間がかかる。
開発に手間がかかる。
予期しない動きをする恐れがある。○ 超音波センサの変更に対応する。 正体補正により走行の直進性を高めるため。 ○ ○ 赤外線センサ用のモジュールを作る。 怪盗機を見つけるため。 ○ 画像処理(色の識別)用のモジュールを作る。 ○ ○ ○ 通信用のモジュールを作る。 認識した数字をサーバへ送信するため。 ○ LED制御用のモジュールを作る。 現在のプログラムの状態を視覚的に知るため。観客を魅せるため。 ○
購入予定物品
| 物品 | 要求 | 製品例 | 単価 | 個数 | 小計 |
|---|---|---|---|---|---|
| アクリル板(透明)。 | 新規でバッテリー置き場、USBハブ、追加のバンパの作成用。 | アクリルアイ アクリル板 (495×495) | 980円
| 1
| 980円
|
| アクリル棒(透明) | バッテリー置き場用のポールの作成用。 | アクリルアイ アクリル棒 (φ15、長さ1m) | 822円
| 1
| 822円
|
| スペーサー | Webカメラの高さの調節用。 | マルツオンライン ジュラコンスペーサー C-315 (M3用、15mm) | 25円
| 4
| 100円
|
| グリップ | 引継ぎのタイヤのつぶれてしまったグリップの取替え用。 | ヨネックス(YONEX) ウェットスーパーエクセルグリップ(黒) | 302円
| 1
| 302円
|
| ユニバーサル基板 | 赤外線センサ基板用 | 秋月電子通商 片面ガラス・ユニバーサル基板 Cタイプ(72x47.5mm) めっき仕上げ | 60円
| 8
| 480円
|
| 赤外線受信機 | 怪盗機の発する赤外線の受信用 | 秋月電子通商 赤外線リモコン受信モジュール GP1UXC44QS | 50円
| 8
| 400円
|
| プラスチックねじ | 赤外線センサをシャーシに固定用。 | 秋月電子通商 3mmプラネ(12mm) + ナットセット(20個入) | 200円
| 1
| 200円
|
機体概形
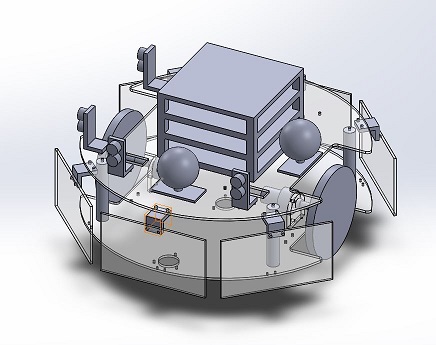
fig.5 機体概形

Fig.6 上面図
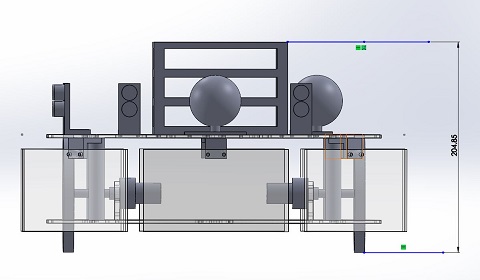
fig.7 正面図
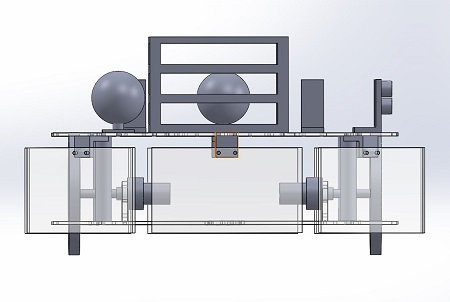
fig.8 後方図
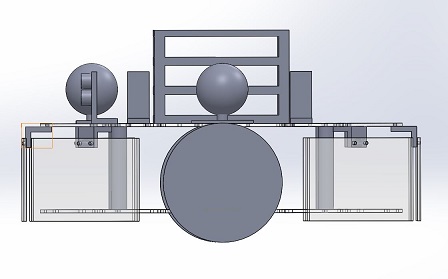
fig.9 左側面図
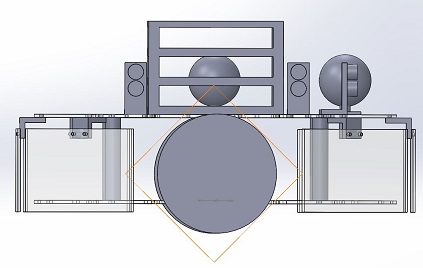
fig.10 右側面図
終わりに
今回のシステム提案を通して、今後のMIRSに必要な事を把握することができた。また、前回解決できなかった問題点と今回新しく追加する機能にも問題点は出てくるので、それらにも注意するように努める。
このシステム提案書を次のシステム基本設計書に生かして、スムーズにシステム開発を行っていきたい。
沼津工業高等専門学校 電子制御工学科