3.1 電源ボード
3.1.1 動作試験
MIRS1401 標準部品試験計画書の3.1.1動作試験に沿って、動作試験をを行った。
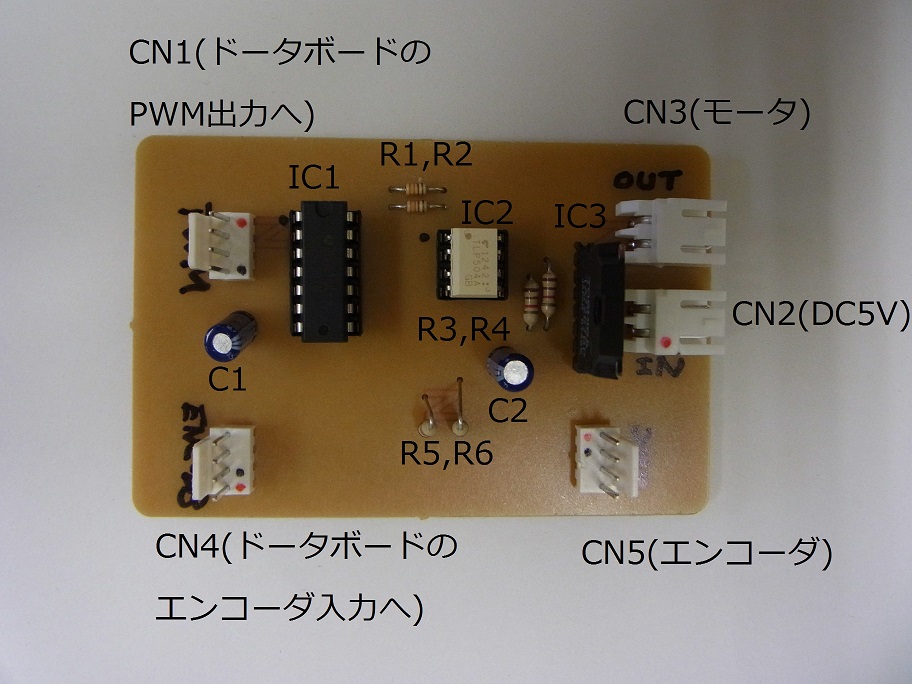
fig1電源ボード実装図と部品の位置を比べて最初、R2とR3が仕様書だと2kΩと5.6kΩになっているのに実際は1.8kΩと6.2kΩが実装されていた。
fig2の回路図で仕様書の通りに部品が配置されているときのVoutを理論値で計算すると、5.03Vになった。
実際に実装されていた部品の配置でVoutを計算すると、5.8Vになった。これだと誤差の許容範囲内(5.1V~5.6V)に入っていないので、R2を1.8kΩ、R3を5.6kΩの抵抗に変えて理論値を計算すると、5.4Vになり誤差の許容範囲内(5.1V~5.6V)になったので、R3を5.6kΩの抵抗に変えた。
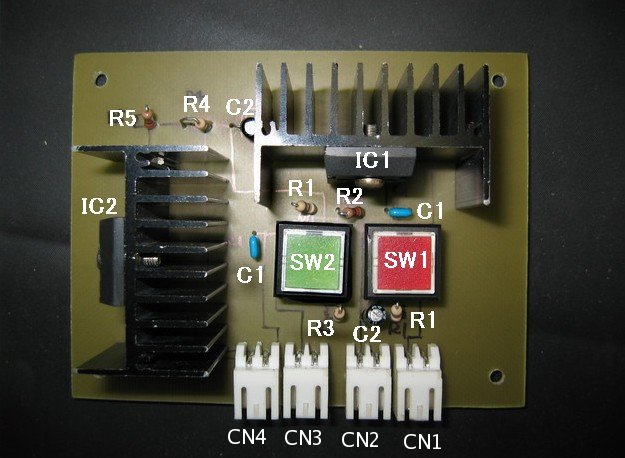
fig1電源ボード実装図と部品の位置を比べて最初、R2とR3が仕様書だと2kΩと5.6kΩになっているのに実際は1.8kΩと6.2kΩが実装されていた。
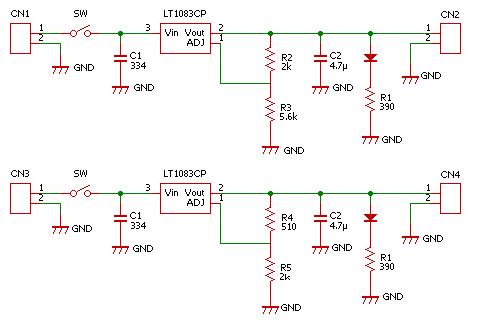
fig2の回路図で仕様書の通りに部品が配置されているときのVoutを理論値で計算すると、5.03Vになった。
実際に実装されていた部品の配置でVoutを計算すると、5.8Vになった。これだと誤差の許容範囲内(5.1V~5.6V)に入っていないので、R2を1.8kΩ、R3を5.6kΩの抵抗に変えて理論値を計算すると、5.4Vになり誤差の許容範囲内(5.1V~5.6V)になったので、R3を5.6kΩの抵抗に変えた。
・制御系電源の試験結果
制御系電源の試験結果を電源ボード制御系電源試験チェックシートに記す。
電源ボード制御系電源試験チェックシート
MIRSSTND デュアルレギュレータ電源ボード製造仕様書の実装図のCN1に定格7.8Vバッテリーを接続したときのCN2の電圧は5.1Vであり、
また、電源ボード制御系電源試験チェックシートより、CN1に繋いだ安定化電源の電圧を0.1Vずつ8.5Vから7.4Vまで変化させたとき、7.4Vから6.0Vまで変化させたとき出力電圧の最大値は、5.1Vから5.6Vの範囲内に収まっているので、合格とする。
電源ボード制御系電源試験チェックシート
MIRSSTND デュアルレギュレータ電源ボード製造仕様書の実装図のCN1に定格7.8Vバッテリーを接続したときのCN2の電圧は5.1Vであり、
また、電源ボード制御系電源試験チェックシートより、CN1に繋いだ安定化電源の電圧を0.1Vずつ8.5Vから7.4Vまで変化させたとき、7.4Vから6.0Vまで変化させたとき出力電圧の最大値は、5.1Vから5.6Vの範囲内に収まっているので、合格とする。
・駆動系電源の試験結果
駆動系電源の試験結果を電源ボード駆動系電源試験チェックシートに記す。
電源ボード駆動系電源試験チェックシート
MIRSSTND デュアルレギュレータ電源ボード製造仕様書の実装図のCN3に定格7.8Vバッテリーを接続したときのCN4の電圧は6.2Vであり、
また、電源ボード駆動系電源試験チェックシートより、CN3に繋いだ安定化電源の電圧を0.1Vずつ8.5Vから7.4Vまで変化させたとき出力電圧の最大値は6.1Vから6.7Vの範囲内に収まっているので、合格とする。
7.3Vから6.0Vまでの出力電圧は、参考値として参考にする。
MIRSSTND デュアルレギュレータ電源ボード製造仕様書の実装図のCN3に定格7.8Vバッテリーを接続したときのCN4の電圧は6.2Vであり、
また、電源ボード駆動系電源試験チェックシートより、CN3に繋いだ安定化電源の電圧を0.1Vずつ8.5Vから7.4Vまで変化させたとき出力電圧の最大値は6.1Vから6.7Vの範囲内に収まっているので、合格とする。
7.3Vから6.0Vまでの出力電圧は、参考値として参考にする。