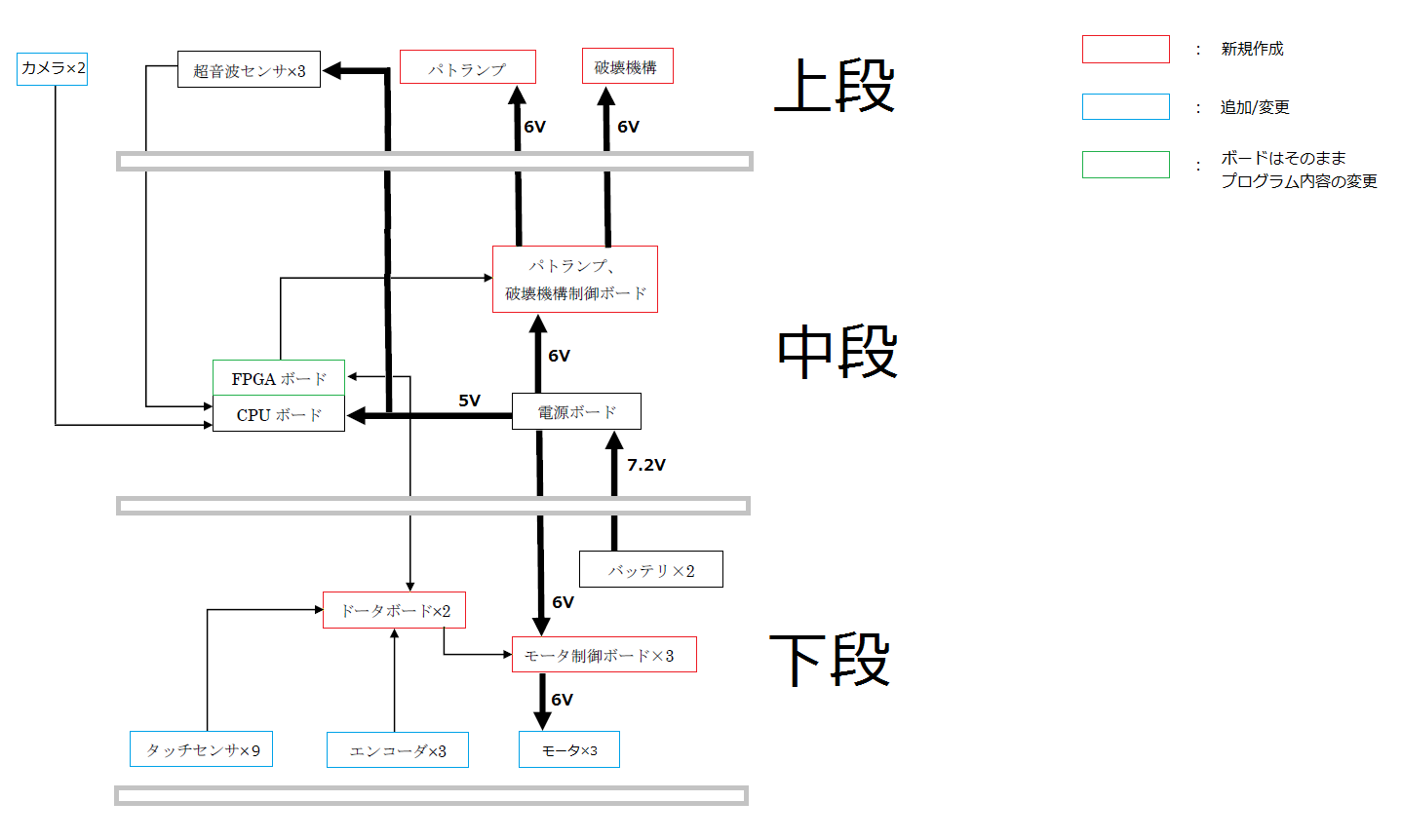
表1に、新規設計する基板・プログラムの概要と関連ドキュメント(詳細設計書)へのリンクをまとめる。
表1 追加・変更箇所の一覧
| 要素 | 関連ドキュメント | 概要 | 担当者 |
|---|
| ドータボード | ドータボード詳細設計書 | モータ制御ボードとエンコーダ3個ずつと、タッチスイッチ9個の接続を、FPGAボードとの間で仲介する。 | 宇佐美、尾関 |
| モータ制御ボード | モータ制御ボード詳細設計書 | 走行系のモータの正転・逆転制御を行う。 | 宇佐美、高井 |
| パトランプ・破壊機構制御ボード | パトランプ・破壊機構制御ボード詳細設計書 | 破壊機構のモータの正転・逆転制御と、パフォーマンス用のパトランプのON/OFF制御を行う。 | 宇佐美、尾関 |
| FPGAボード | FPGAプログラム詳細設計書 | アドレスデコーダを介してCPUボードと各種デバイスを接続する。また、モータドライバの制御とエンコーダによる回転数認識のためのプログラムをFPGAボードに内蔵する。 | 宇佐美、高井 |
| モータ・エンコーダ | - | オムニホイール3輪による走行を行うため、各2個から各3個に増やす。 | - |
| タッチスイッチ | - | どの面が壁とぶつかっても認識できるよう、3個から9個に増やす。 | - |
| カメラ | - | 視野を広げるために2個に増設する。 | - |
| 破壊機構 | - | 怪盗機の風船を割るために搭載。針を紐で巻き上げるのモータを持つ。 | - |
| パトランプ | - | パフォーマンス用に搭載し、怪盗機を追跡する際に点滅させる。 | - |
これ以外で、標準機から変更せず、そのまま使用する箇所は表2に示す。
表2 変更のない箇所の一覧
| 要素 | 概要 |
|---|
| 超音波センサ | 超音波の反射により、壁との距離計測に使用する。 |
| 電源ボード | 7.2Vバッテリから供給される電圧を、レギュレータを通して制御側の5Vと、駆動側の6Vに調整する。 |
| バッテリ | バッテリの個数・種類は標準機から変更せず、7.2Vのものを2個使用する。 |