摫捠帋尡
奺慺巕丄抂巕偵僥僗僞傪摉偰偰丄埲壓偵帵偡傛偆偵奺慺巕娫偑摫捠偟偰偄傞偐傪妋擣偡傞丅師偵丄偦傟埲奜偺応強偱僔儑乕僩偑婲偒偰偄側偄偐傪妋擣偡傞丅
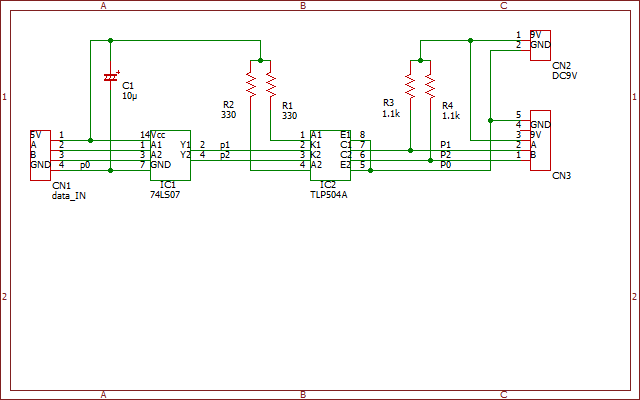
婎斅A
- CN1偺1斣丄C1偺亄懁丄R1丄R2丄IC1偺14斣(DC5V)
- CN1偺4斣丄C1偺亅懁丄IC1偺7斣丄僺儞僿僢僟p0(惂屼懁GND)
- 9V揹抮偺亄嬌丄CN3偺3斣丄R3丄R4(DC9V)
- 9V揹抮偺亅嬌丄CN3偺4斣丄IC2偺5斣偲8斣丄僺儞僿僢僟P0(嬱摦懁GND)
- CN1偺2斣丄IC1偺1斣
- CN1偺3斣丄IC1偺3斣
- IC1偺2斣丄IC2偺2斣丄僺儞僿僢僟p1
- IC1偺4斣丄IC2偺3斣丄僺儞僿僢僟p2
- R1丄IC2偺1斣
- R2丄IC2偺4斣
- CN3偺2斣丄R3丄IC2偺6斣丄僺儞僿僢僟P1
- CN3偺1斣丄R4丄IC2偺7斣丄僺儞僿僢僟P2
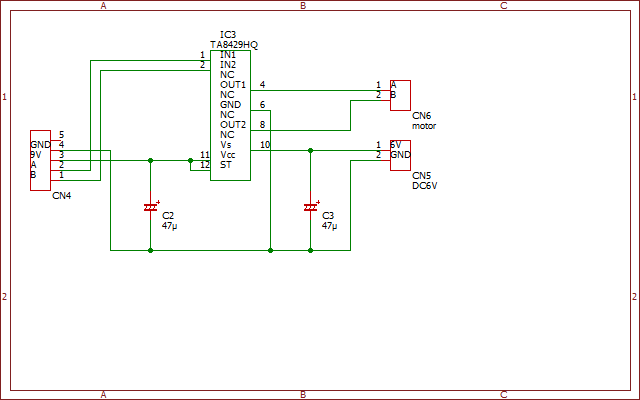
婎斅B
- CN4偺3斣丄C2偺亄懁丄IC3偺11斣偲12斣(DC9V)
- CN5偺1斣丄C3偺亄懁丄IC3偺10斣(DC6V)
- CN4偺4斣丄CN5偺2斣丄C2丒C3偺亅懁丄IC3偺6斣(嬱摦懁GND)
- CN6偺1斣丄IC3偺4斣(儌乕僞弌椡A)
- CN6偺2斣丄IC3偺8斣(儌乕僞弌椡B)
- CN4偺2斣丄IC3偺1斣
- CN4偺1斣丄IC3偺2斣
摦嶌帋尡
婎斅A偺CN1偵DC5V傪報壛偟丄9V揹抮傪愙懕偡傞丅CN1偺奺抂巕偵H(4.5V乣6V掱搙)丄L(0V)偺擖椡傪梌偊偰丄僺儞僿僢僟偺揹埵偑昞2偺傛偆偵側偭偰偄傞偐傪妋擣偡傞丅師偵丄婎斅A偺CN3偲婎斅B偺CN4傪愙懕偟丄CN5偵DC6V傪報壛偡傞丅CN6偵儌乕僞傪愙懕偟偰丄儌乕僪捠傝偵摦嶌偡傞偐傪妋擣偡傞丅僗僩僢僾偲僽儗乕僉偼丄儌乕僞偺幉傪庤偱夞揮偝偣偨偲偒丄夞偟偵偔偄偐偳偆偐偱嬫暿偡傞丅側偍丄昞偵偍偗傞婰崋偺掕媊偼埲壓偺捠傝偱偁傞丅
- Vi1乧CN1丒2斣僺儞亅4斣僺儞娫揹埑
- Vi2乧CN1丒3斣僺儞亅4斣僺儞娫揹埑
- Vp1乧僺儞僿僢僟p1亅p0娫揹埑
- Vp2乧僺儞僿僢僟p2亅p0娫揹埑
- Vp3乧僺儞僿僢僟P1亅P0娫揹埑
- Vp4乧僺儞僿僢僟P2亅P0娫揹埑
昞2丂儌乕僞惂屼儃乕僪偺僼傽儞僋僔儑儞
| 擖椡 | 僺儞僿僢僟 | 儌乕僪 |
|---|
| Vi1 | Vi2 | Vp1 | Vp2 | Vp3 | Vp4 |
|---|
| L | L | L | L | L | L | 僗僩僢僾 |
| L | H | L | H | L | H | 惓揮 |
| H | L | H | L | H | L | 媡揮 |
| H | H | H | H | H | H | 僽儗乕僉 |