| 名称 |
MIRS1102 標準部品テスト計画書補足 |
| 番号 |
MIRS1102-PLAN-0004 |
最終更新・2011.6.17
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2011.6.17 |
伊庭達哉 |
|
初版 |
目次
1. はじめに
-
本ドキュメントは、MIRS1102の標準部品の動作テストの方法を具体的に記したものである。
2. テスト項目追加内容
-
標準部品テスト計画書の補足内容について示す。
-
-
2.1.1 導通試験
-
導通試験における必要器具を次に示す。
- MIRSMG3D電源ボード、はんだごて、はんだ、はんだ吸い取り線、テスタ
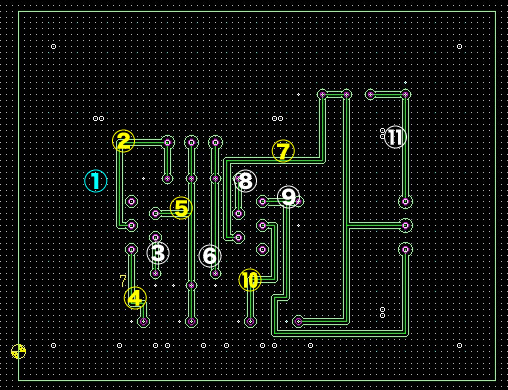
パターン図
に次のように番号を振る。
-
-
-
この番号に従って表を作成する。
|
② |
③ |
④ |
⑤ |
⑥ |
⑦ |
⑧ |
⑨ |
⑩ |
⑪ |
| ① |
|
|
|
|
|
|
|
|
|
|
| ② |
|
|
|
|
|
|
|
|
|
|
| ③ |
|
|
|
|
|
|
|
|
|
|
| ④ |
|
|
|
|
|
|
|
|
|
|
| ⑤ |
|
|
|
|
|
|
|
|
|
|
| ⑥ |
|
|
|
|
|
|
|
|
|
|
| ⑦ |
|
|
|
|
|
|
|
|
|
|
| ⑧ |
|
|
|
|
|
|
|
|
|
|
| ⑨ |
|
|
|
|
|
|
|
|
|
|
| ⑩ |
|
|
|
|
|
|
|
|
|
|
-
-
-
この表を元に、配線①〜⑪のそれぞれについて、断線していないかどうかチェックする。この時のチェック方法として、目視によるチェック、テスタを用いた導通チェックの2種類を行い、1回目と2回目でチェックの色を変えるなど、見落としの無いような工夫をすると良い。
また、図に青色で示した①はGND、黄色で示した②,④,⑤,⑦,⑩はVccである。VccとGNDが短絡していると、そこに大電流が流れてしまいとても危険なので、特に注意してチェックする。
もし断線が確認できたら、はんだで修復可能な場合は修復、修復不可能な場合は基板を作り直す。
(作成:伊庭)
-
-
2.2.1 導通試験
-
導通試験における必要器具を以下に示す。
- MIRSMG3Dドータボード2枚、はんだごて、はんだ、はんだ吸い取り線、テスタ
導通試験の内容は2.1.1 電源ボード導通試験と同様、パターン図に番号を振り、表を作成して目視とテスタの2回のチェックを行う。このときに重要なのは、電源ボードと同様VccとGNDを把握し、特に注意して導通試験を行うことである。
2.2.2 動作試験
-
動作試験における必要器具を以下に示す。
- MIRSMG3Dドータボード2枚、CPUボード、FPGAボード、白線センサ、タッチセンサ、ディスプレイ及びケーブル、キーボード、安定化電源またはバッテリー2個、電源ケーブル
ドータボードの動作試験には、
On/Off I/Oデータ取得試験プログラム
を使用する。具体的には、タッチセンサ、白線センサの値を正しく読み取ってCPUに伝えられるかを試験することで、ドータボードの動作を確認する。
以下に、I/Oデータ取得試験プログラムを用いたドータボードの試験手順について示す。
- 最初に、ドータボードに何のセンサーも接続せずに、実行ファイルirs_ts_ws_testを実行し、I/O[1~8]、TS[1~4]のすべてが1であることを確かめる。
- ドータボード回路図
の下段のDB_IO1に白線センサ、上段のDB_TS1にタッチセンサを接続する。
- 白い紙などを白線センサに近づけたり遠ざけたりして、I/O[1]が1と0を繰り返すことを確認する。また、タッチセンサをつけたり離したりして、TS[1]が1と0を繰り返すことを確認する。
- 白線センサはDB_IO1~8、タッチセンサはDB_TS1~4のすべてについて、3.と同様の操作をし、その動作を確認する。
(作成:伊庭)
-
-
2.3.1 導通試験
-
導通試験における必要器具を以下に示す。
- MIRSMG3Dモータ制御ボード、はんだごて、はんだ、はんだ吸い取り線、テスタ
導通試験の内容は2.1.1 電源ボード導通試験と同様、パターン図に番号を振り、表を作成して目視とテスタの2回のチェックを行う。このとき、ICはまだ実装しない。
導通試験がすべて終わった後に、ICを実装する。
その後、モータ制御ボードの電源を入れるが、このとき制御系電源、駆動系電源の順にONにする。また、電源を落とす際は駆動系電源、制御系電源の順にOFFにする。
(詳細はMTCB取扱説明書参照)
2.3.2 動作試験1
-
USART.hexをPICに書き込みシリアル通信のテストを行う。
使用機器を以下に示す。
- CPUボード、FPGAボード、ドーターボード、モータ制御ボード(※)
(※電圧レベルをRS232C規格に変換するMAX232CなどのICを用いればパソコンのシリアルポートを用いてもテストを行うことができる。)
動作試験1の内容は次の通りである。
USART.hexをPICに書き込み任意の値を送信すると同じ値が返信させることを確認し、モータ制御ボードのシリアル通信ができているかをテストする。また、この単純なループバック動作により送信線、受信線が問題無いかがわかるため、ケーブルのテストにもなりPICの設定及び配線のテストにもなる。
2.3.3 動作試験2
-
RE.hexをPICに書き込み、ロータリエンコーダ読み取り部のテストを行う。
使用機器を以下に示す。
- モータ制御ボード、ロータリエンコーダ、パソコンなどの通信環境
動作試験2の内容は次の通りである。
ロータリエンコーダを制御ボードに接続し、電源を入れる(電源の入れ方に注意すること)。このPICプログラムには走行制御プログラムは組み込まれていないので、直接指を使ってロータリエンコーダをくりくりと回す。このとき回転方向によってLED1が明滅し、正転なら点灯、逆転なら消灯することを確認することによりロータリエンコーダ読み取り部のテストを行う。もし明滅しなかった場合、モータ制御ボードが間違っているか、接続の仕方が間違っているということになる。モータ制御ボードにはLEDがデバックオプションとして2個ついており、LED2はモータを走行制御する際の回転方向のデバック用である。このため、この動作試験ではLED2は消灯したままでLED1だけが明滅する。
2.3.4 動作試験3
-
PWM.hexをPICに書き込み、モータ制御部のテストをする。
使用機器を以下に示す。
- 直流電源装置、MG3本体の電源又は、5Vの直流電源、オシロスコープ、適当な大きさの抵抗(目あすとして数KΩと50Ωの大きさの抵抗)
動作試験3の内容は次の通りである。
モータ制御ボードのCN2(モータ出力用電源ケーブルの接続部)に適当な抵抗を繋ぎ、オシロスコープで抵抗の両端の電圧を測るようにプローブを繋ぐ。また、CN1(電源ボード用電源ケーブルの接続部)にMG3本体の電源ボードの制御部直流電源を電源ケーブルを介して接続する。電源を入れるとオシロスコープに波形が顕れる。正転、逆転、正転、ブレーキ、逆転、正転、逆転をduty50%,100%,0%の順に繰り返したときの出力波形が図に示したようになるかテストする。
[モータをモータ出力用電源ケーブルを介してCN2に接続して試験する場合]
モータへの過電圧の保護のために直流電源装置をCN2接続する。また、CN1に接続してある直流電源装置と、CN2に接続してある直流電源装置の電源を入れた際に、直流電源装置(CN2側)の電流計が1A以上を示した場合は即座に電源を切る。また、直流電源装置(CN2側)の電源は7V以上にしない(フォトカプラが壊れてしまう恐れがあるため)。CN1側とCN2側の直流電源装置の電源を入れ正転、逆転、正転、ブレーキ、逆転、正転、逆転をduty50%,100%,0%の順に繰り返したときそれに対応した正しい動作になっているかを確認する。
(作成:西村)
-
-
2.4.1 動作試験
-
動作試験における必要器具を以下に示す。
- MIRS標準機、ディスプレイ及びケーブル、キーボード、安定化電源またはバッテリー×2、電源ケーブル、メジャー、平らな板、円柱、分度器
また、動作試験には
超音波距離計測試験プログラム
を使用する。動作試験の内容を以下に示す。
- 標準機と平行な位置に平らな板を置き、メジャーでWebカメラと平らな板との距離を測った後実行ファイルuss_testを実行し、表示される値とメジャーで測った値とが一致するかどうかを調べる。この際、超音波センサの規格では20cm以下の距離を計測することは出来ないので、それよりも近い距離で測定したらどうなるか、また、距離が最大で何cmまで計測できるかも調べる。具体的に計測する距離は、5cm、10cm、20cm、100cm、250cm、300cm、400cm、500cm、600cmである。最大値を調べる際は、測定結果の状態から臨機応変に判断して、誤差±5~10cm程度の精度で調べる。
- 1. でエラー表示が無く正確に測定できた距離に標準機を置き、標準機本体をある一定の角度に傾けるか、板を傾けるかして、MIRSと板との位置関係が平行でなくても正常に測れるか確かめる。具体的に傾ける角度は-60°、-30°、0°、30°、60°である。この状態で、ある程度実測値に近い値がとれたら、1. のように幅広い範囲で測定してみる。
- 円柱のようなものを用意する。これと標準機とを対面に置き、どのような測定結果が出るかを調べる。
(作成:澤谷)
-
-
2.5.1 動作試験
-
数字認識試験プログラムを使用したテストの方法について記述する。
- 標準動作確認
- 数字認識に用いるターゲットをWebカメラから60cm離れた所に置き、ターゲットの数字を0から9まで変えて、その数字を正しく認識するかを確認する。
- 距離・角度の変化
- 距離を60cmの位置から10cmずつターゲットに近づけ、不具合が起こるまでの距離を調べる。また、同様に10cmずつ離していき、不具合の生じる距離を調べる。また、距離が60cmの時のターゲットの角度を30°,60°と変え、処理後の画像にどのような影響をもたらすかを調べる。
- 閾値の設定
- 色の閾値のパラメータがimg/num_threshold_value.h内のTARGET_TH1_MIN~TH3_MAXで定義されている。この値大きくした場合(100)、小さくした場合(10)の処理後の画像を本来の画像と比べ、閾値の変化によって処理後の画像がどのように変化するかを調べる。
- FONT_COLORの変更
- FONT_COLORはimg/num_threshold_value.hで定義されている。明るい場合white、暗い場合をblackとして定義すべき設定を逆にした場合の処理後の画像の変化を調べる。
(作成:石井)
-
-
2.6.1 動作試験
-
動作試験は、あらかじめ用意されたMIRS標準機のモータ制御ボードを自分たちのものに差し替えて行うものと、自分たちの標準機で行うものの2種類を行う。
- 動作試験1
- はじめに、モータが正常に回転するかどうかを確かめる。左右のタイヤにpw(パワー)を0,50,100で変更し、動作させる
- →片方ずつ動作を確かめる。
- 動作試験2
- 次に直進、後退、回転、旋回動作をするかテストする。
直進
- モータ制御のプログラムによると、距離に比べて時間が短いとき、MIRSの出せる最大のスピードで動作するので、最初に5秒で5[m]進めようとさせ、MIRSの最大速度(境界速度)を求める。これにより境界条件を求める。
実際に計測する数値は次のように定める。
| 時間(sec) |
距離(cm) |
結果 |
| 5 |
500 |
|
| 20 |
〃 |
|
| 50 |
〃 |
|
後退
| 時間(sec) |
距離(cm) |
結果 |
| 5 |
50 |
|
| 20 |
〃 |
|
| 50 |
〃 |
|
回転
| 時間(sec) |
回転角(deg) |
結果 |
| 5 |
1080 |
|
| 20 |
90 |
|
| 〃 |
180 |
|
| 〃 |
360 |
|
旋回
| 時間(sec) |
旋回角(deg) |
旋回半径(cm) |
結果 |
| 5 |
90 |
30 |
|
|
180 |
|
|
|
360 |
|
|
|
90 |
60 |
|
|
180 |
|
|
|
360 |
|
|
| 20 |
90 |
30 |
|
|
180 |
|
|
|
360 |
|
|
|
90 |
60 |
|
|
180 |
|
|
|
360 |
|
|
(作成:山本)
3. 関連文書
沼津工業高等専門学校 電子制御工学科