 |
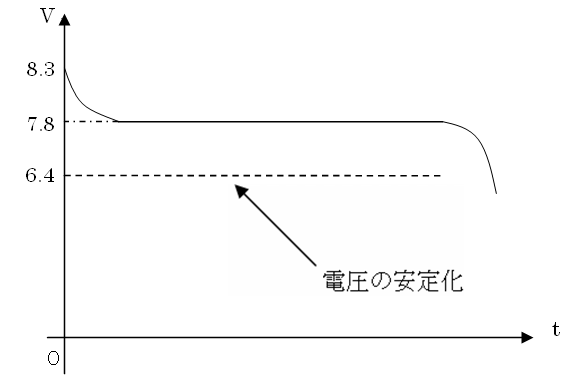
Fig.1 バッテリー電圧の時間変化 |
| 沼津高専 電子制御工学科 | ||||||
| ||||||
| 改訂記録 | ||||||
|---|---|---|---|---|---|---|
| 版数 | 作成日 | 作成者 | 承認 | 改訂内容 | ||
| A01 | 2007.7.12 | 小澤(拓)・池田・小澤(竜) 加藤・佐々木・田中 水上・宮川 |
池田 | 初版 | ||
1 全体動作
2 デュアルレギュレータ電源ボード
3 白線センサによるポスト番号識別装置
4 アームによるポスト獲得装置
5 ドットマトリクス
1.1 機能の明確化
まず、全体の動作概要は以下のようになっている。MIRS0701では1回目の競技から番号順にポストを獲得していく。
・ 競技1回目
全てのポストの位置を記憶し、順次番号順に獲得していく。発見順序が 5→1→3→2→4の場合、1と2は全てのポストの位置を確認していなかったとしても獲得動作を行う。3、4、5はポストの位置確認後、もう一度アプローチし獲得する。この時、プログラム内部に仮想マップを作り、ポスト獲得や位置確認に役立てる。
・ 競技2回目
ポストの位置は全て記憶しているので、番号順に獲得する。
1.2 搭載内容の明確化
全体を通しては、大きなハードウェア、エレキの変更はなく、標準機がベースである。また、その他の要素に関しては別に検討している。
1.3 インターフェースの明確化
ソフトウェアの大幅な変更のみである。仮想マップを用いることにより、探索を効率化を図る。仮想マップは、中心位置からの極座標で得られるデータを直交座標へ変換する。そして、それをある程度の精度で区切った構造体の中へ入れておく。構造体はchar型で宣言し、そのデータとしてのサイズは、一辺を n とした場合、n×n×16[Byte]である(charは256[bit]=16[Byte])。仮に一辺を15とした場合でも3.6[KB]と軽量である。
2.1 機能の明確化
デュアルレギュレータ電源ボードを用いて電圧を安定化する。
2.2 搭載・開発するハードウェアの明確化
2.2.1 ハードウェア
・ 電源電圧の安定化
バッテリーの消耗により、パラメータを導出したときの電圧とMIRSが動作するときの電圧が変わってしまうことが誤差となる。これを防ぐために低損失のレギュレータLT1083CPを用いて、電源電圧の7.8[V]を6.4[V]に安定化する(フル充電時は8.3[V]程となる)。
以下に、簡略図を示す。
|
Fig.1 バッテリー電圧の時間変化 |
以下に、電源ボードのブロック図を示す。
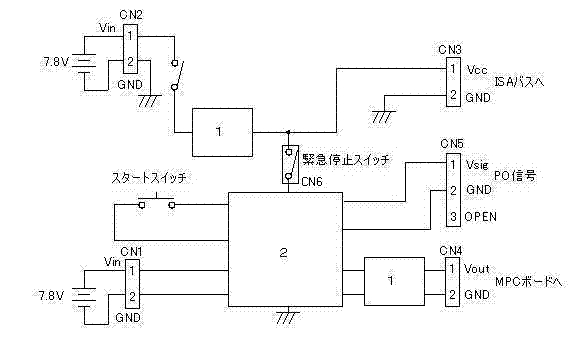 |
Fig.2 電源ボードのブロック図 |
現在、牛丸先生がデュアルレギュレータ電源ボードの製造仕様書を作成して下さっているので、その製造仕様書とMIRS0604のドキュメントをもとに、製造し、搭載する。
2.3 ハードウェアとソフトウェアのインターフェースの明確化
全てエレクトロニクスが担当
3.1 機能の明確化
ポスト番号を識別するために、白線センサを垂直に4つ並べてポストのコードの本数を読み取る。この本数よりポストの周りを周回することなく、ポスト番号を識別する。また、この装置にバネを搭載しポスト番号識別後、そのまま獲得動作に移行できるようにする。
3.2 搭載・開発するハードウェアとソフトウェアの明確化
3.2.1 ハードウェア
・ 白線センサ
垂直に4つ並べたものをMIRS前方に搭載し、ポスト番号を識別する。
・ タッチセンサ
ポスト番号識別装置に搭載する。装置がポストに十分近づいたかを判別する。
・ バネ
ポスト番号識別装置に搭載する。ポスト獲得動作の際に、この装置は動作の妨げとなるので、バネによって装置を伸縮させポスト獲得動作を可能にする。
3.2.2 ソフトウェア
ポスト番号識別装置のタッチセンサが押されるまで前進する。そして、白線センサからのデータを取得し、ポスト番号を記録する。
3.3 ハードウェアとソフトウェアのインターフェースの明確化
・ メカニクス
骨組みの加工・組み立て
・ エレクトロニクス
コネクタの作成、白線センサの感度調整、FPGAの回路変更
・ ソフトウェア
ポスト番号識別プログラムの作成
4.1 機能の明確化
ポスト全体を囲って、MIRSが前後左右に動くことにより、ポストを獲得する。これにより、周回動作を省いてポストを獲得することが出来る。
4.2 搭載・開発するハードウェアとソフトウェアの明確化
4.2.1 ハードウェア
・ 駆動に用いるモーター
モーター名:トルクチューンモーター
消費電流 [mA]:1200
無負荷回転数 [rpm]:13600
最大トルク [g・cm]:14.5
重量 [g]:17.0
必要電圧 [V]:3
・ アーム、バンパー
アームの図、寸法等は技術調査書(MIRS0701-TECH-0001)に示す。以下に、バンパーの図を示す。
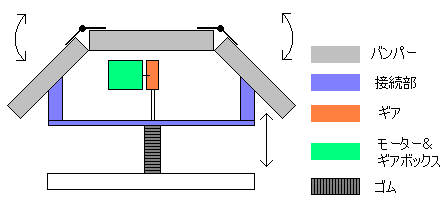 |
Fig.3 バンパー |
技術調査書では、ギアのモデリングを行ったが、 適したギア比を持つギアボックスが販売されているので、それを用いる。 これにより、スペースの縮小が可能になる。
4.2.2 ソフトウェア
ポスト番号識別装置に搭載されているタッチセンサがONになると、それぞれのモーターが正転し、上部にあるアームが下降する。そして、下部の糸が巻き取られ、固定されていた接続部が動くことによりバンパーが展開する。これらによりポストを囲み、獲得する。獲得後、それぞれのモーターを逆転させ、各機構を収納する。
4.3 ハードウェアとソフトウェアのインターフェースの明確化
優先度の高い順番で考えると、以下のようになる。
・ メカニクス
アーム、バンパーの作成
・ エレクトロニクス
正転、逆転、停止の機能を持つMPC用ボードの作成、FPGAの回路の変更
・ ソフトウェア
ポスト獲得動作プログラムの作成
5.1 機能の明確化
現在の情報を外部に表示するために、LEDの集合体(LED matrix)を点灯し、文字や現在の情報を表示する。これにより観客へのパフォーマンスをする。
5.2 搭載・開発するハードウェアとソフトウェアの明確化
5.2.1 ハードウェア
秋月電子のK-794というドットマトリクス表示機材を用いる。検討の結果、資料が十分にあり、CPUボードからの指令で動かせる算段がついた。また、購入をする機材には、ICが付属しており、その部分の回路設計を省くことが可能である。
5.2.2 ソフトウェア
ダイナミック表示をすることにより省電力化を図る。ダイナミック表示とは、短い時間で連続点滅させることにより常に点灯しているように見えるようにする手段である。また、すべてのLEDに点灯命令などを同時に出す必要がなくなるので、シフトレジスタなどのメモリが必要なる。さらにいえば、同時点灯させようとしても、定格電流の関係で不可能である。
5.2.3 アルゴリズム
シフトレジスタにクロック単位で、データを書き込んでいく。データは16[bit]であり、n番目を点灯させる場合、nクロック後に"1"を入力する。入力端子は3つあり、1は横軸を担当し、2と3はそれぞれ別のICを担当する。例えば、7番目のラインをIC2についてすべて点灯する場合、信号1の7クロック目に"1"、信号2の全てのクロックに"1"と入力すればよい。すべてのデータの入力を終えたら、ラッチに"010"と入力し、点灯させる。
また、今回は使用しないが、ストロボ機能があり、ここを"1"にすれば全てのLEDは消灯する。本来の機能はここに断続的に命令を入れ、輝度を調節することである。実際に登用する時には、ポスト獲得時に"GET!"や、仮想マップの様子を表示させる予定である。
5.3 ハードウェアとソフトウェアのインターフェースの明確化
・ ソフトウェア
ドットマトリクスの点灯制御
・ エレクトロニクス
信号の入力の管理(要:専用の回路作成)、FPGAへの対応
・ メカニクス
半田付け(説明書を参考にする)
| 関連文書 |