 |
Fig.1丂Basic Adjustable Regulator |
| 徖捗崅愱 揹巕惂屼岺妛壢 | ||||||
| ||||||
| 夵掶婰榐 | ||||||
|---|---|---|---|---|---|---|
| 斉悢 | 嶌惉擔 | 嶌惉幰 | 彸擣 | 夵掶撪梕 | ||
| A01 | 2007.7.4 | 彫郪乮戱乯丒抮揷丒彫郪乮棾乯 壛摗丒嵅乆栘丒揷拞 悈忋丒媨愳 |
抮揷 | 弶斉 | ||
| A02 | 2007.7.10 | 抮揷 | 抮揷 | 挻壒攇僙儞僒偺崁栚丒恾偺捛壛丄奺崁栚偺廋惓 | ||
| A03 | 2008.1.18 | 抮揷 | 抮揷 | 僪僢僩儅僩儕僋僗奐敪拞巭偺暥偺捛壛 | ||
1丂僨儏傾儖儗僊儏儗乕僞揹尮儃乕僪
2丂億僗僩斣崋幆暿婡峔
3丂挻壒攇僙儞僒
4丂億僗僩妉摼梡傾乕儉
5丂僪僢僩儅僩儕僋僗
6丂僜僼僩僂僃傾
拲丗僪僢僩儅僩儕僋僗偼奐敪傪拞巭偟偨
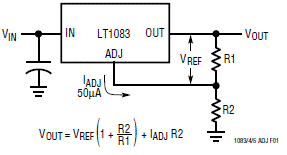
儗僊儏儗乕僞偼丄挷愡憰抲偲偄偆堄枴偱偁傝丄僐儞僺儏乕僞僔僗僥儉偱偼堦斒偵揹尮埨掕憰抲傗曄埑憰抲側偳傪巜偡丅 嬱摦晹乮嵍塃偺儌乕僞傊偺弌椡懁乯偵傕儗僊儏儗乕僞傪庢傝晅偗丄揹埑傪埨掕壔偡傞偙偲偵傛傝MIRS偺摦嶌岆嵎傪彮側偔偡傞偙偲傪栚揑偲偡傞丅僷儔儊乕僞傪摫弌偟偨偲偒偺揹埑偲MIRS偑摦嶌偡傞偲偒偺揹埑偑曄傢偭偰偟傑偆偨傔岆嵎偑婲偙傞丅偦偺岆嵎傪彮側偔偡傞偨傔偵揹埑傪埨掕壔偡傞丅嶰抂巕儗僊儏儗乕僞偼丄擖椡丄愙抧丄弌椡偺嶰抂巕傪帩偪丄擖椡偝傟偨捈棳揹尮傪暯妸丄掕揹埑壔偟偰弌椡偡傞傕偺偱偁傞丅儗僊儏儗乕僞偼惂屼晹偲摨偠LT1083CP傪梡偄傞丅埲壓偵偙偺儗僊儏儗乕僞偺巇條偵偮偄偰挷嵏偟偨寢壥傪傑偲傔傞丅
|
Fig.1丂Basic Adjustable Regulator |
Fig.1偼LT1083CP偺昗弨夞楬恾偱偁傞丅MIRS偵巊偆儌乕僞乕偼6.3乣6.5[V]偱埨掕偟偰摦嶌偡傞丅偙偙偱偼揹埑傪6.4[V]偵埨掕壔偡傞偲峫偊傞丅傛偭偰丄VOUT亖6.4[V]偲側傞丅
巇條彂偵傛傟偽丄VREF亖1.25[V]丄IADJ亖50[兪A]偱偁傞丅
昗弨婡偺揹尮儃乕僪偺掅揹埑夞楬偲摨條丄R2=2[k兌]偲偟丄R1傪壜曄掞峈偲偡傟偽丄Fig.1偺幃傛傝R1佮495[兌]偲側傞丅
弌椡偡傞揹埑偼丄昁偢擖椡偝傟傞揹埑傛傝傕掅偔側傞丅偙傟偼儗僊儏儗乕僞偵傛傞揹埑崀壓暘偑偁傞偨傔偱偁傞丅擖弌椡揹埑偺嵎(Dropout Voltage)偼丄巇條彂偵傛傞偲昗弨1.3[V]丄嵟戝偱1.5[V]偱偁傞乮壓昞乯丅
Tab.1丂Dropout Voltage |
 |
僶僢僥儕乕偺嵟戝偼7.8[V]偱偁傞偑丄僼儖廩揹偱偼8.3[V]傎偳偱偁傞丅亀埨掕栚昗悢抣亄昗弨擖弌椡揹埑偺嵎亙僶僢僥儕乕偺嵟戝亁偲側傟偽栤戣側偄丅
傛偭偰丄6.4亄1.3亖7.7[V]偲側傝丄7.7亙8.3側偺偱埨掕壔壜擻偩偲尵偊傞丅
仸尰嵼丄媿娵愭惗偑僨儏傾儖儗僊儏儗乕僞揹尮儃乕僪偺惢憿巇條彂傪嶌偭偰壓偝偭偰偄傞偲偄偆偙偲側偺偱姰惉師戞偦傟傕嶲峫偵偟偰偄偒偨偄丅
愒奜慄僙儞僒傪巊梡偣偢丄敀慄僙儞僒4偮偲僞僢僠僙儞僒1偮傪悅捈偵暲傋偰MIRS慜曽偵愝抲偡傞丅偦偟偰僞僢僠僙儞僒偑墴偝傟偨帪偵億僗僩偺儔僀儞偺悢傪撉傒庢傝丄億僗僩斣崋傪幆暿偡傞丅偙偺曽幃傪偲傞偙偲偺棙揰丄寚揰傪嫇偘傞丅
亅棙揰
丒 億僗僩偺斣崋傪丄億僗僩傪廃夞偡傞偙偲側偔幆暿偡傞偙偲偑偱偒傞丅
丒 億僗僩斣崋幆暿屻丄妉摼摦嶌偵堏峴偟傗偡偄丅
亅寚揰
丒 奜晹偺柧傞偝偺忬懺曄壔偵偡偖偵弴師懳墳偡傞偙偲偑偱偒側偄丅傑偨億僗僩偑墭傟偰偄偨応崌偵岆摦嶌傪婲偙偡応崌偑偁傞丅
丒 愒奜慄僙儞僒傪巊梡偟側偄偺偱丄億僗僩妉摼偺妋擣偑偱偒側偄丅
敀慄(岝)僙儞僒偵偮偄偰挷嵏偟偨撪梕傪埲壓偵帵偡丅
岝僙儞僒偼僼僅僩僙儞僒偲傕屇傇丅
僼僅僩僙儞僒偲偼岝偵傛偭偰懳徾暔偺桳柍丄戝偒偝乮嬓丒挿偝乯丄柧傞偝丄怓丄
斀幩僷僞乕儞側偳偺暔棟検傪専弌偡傞丄敪岝丒庴岝慺巕傪慻傒崌傢偣偨暋崌揹巕晹昳
偺偙偲傪尵偆丅戝偒側摿挜偼柍愙揰偺揹巕揑怣崋偲偟偰庢傝弌偣傞丅
専抦偡傞曽朄偱摟夁岝偺幷岝偺桳柍傪専弌偡傞摟夁宆僼僅僩僙儞僒乮僼僅僩僀儞僞儔僾僞乕乯丄斀幩岝傪専弌偡傞斀幩宆僼僅僩僙儞僒乮僼僅僩儕僼儗僋僞乯偵暘偗傜傟傞丅丂摟夁宆僼僅僩僙儞僒宍幃偱敪岝晹丒庴岝晹傪斾妑揑挿偄嫍棧傪偍偔暘棧宆僼僅僩僙儞僒乮枖偼價乕儉宆僼僅僩僙儞僒乯傕嵟嬤棙梡偑懡偔側偭偰偒偨丅
億僗僩扵嶕丄嫍棧應掕偍傛傃惓懳曗惓帪偵巊梡偡傞丅億僗僩廃夞摦嶌傪峴傢偢偵億僗僩妉摼傪偡傞梊掕側偺偱丄搵嵹偡傞挻壒攇僙儞僒偼MIRS慜曽偺2偮偺傒偱偁傞丅偦偙偱丄梫媮偝傟傞巇條傪枮偨偣傞偐偳偆偐傪攃埇偡傞偨傔偵昗弨婡偵搵嵹偝傟偰偄傞挻壒攇僙儞僒偑偳傟傎偳偺惈擻側偺偐傪妋擣偟偨丅
幚嵺偵偼丄昗弨婡傪婲摦偟uss_test傪幚峴偟偰偁傞嫍棧偵抲偄偨億僗僩偵挻壒攇傪斀幩偝偣丄僨傿僗僾儗僀偵昞帵偝傟傞尷奅偺應掕抣傪撉傒庢偭偨丅偦偺寢壥丄MIRS屻曽偐傜尒偰嵍懁偼3000[mm]掱搙丄塃懁偼2000[mm]掱搙偺嫍棧傑偱應掕偡傞偙偲偑壜擻偩偲偄偆偙偲偑傢偐偭偨丅
椉曽偲傕2000[mm]埲忋偺嫍棧傪應掕偱偒傞偺偱丄摦嶌偵偼栤戣側偄偩傠偆丅偨偩丄嵍塃偺挻壒攇僙儞僒偺應掕嫍棧偵嵎偑偁傞偨傔丄帪娫偑偁傟偽嶌傝捈偦偆偲峫偊偰偄傞丅
廃夞摦嶌傪峴傢偢億僗僩傪妉摼偡傞偨傔偵傾乕儉傪梡偄傞丅 傾乕儉偺悺朄摍傪嶼弌偡傞偨傔偵丄億僗僩丒婡懱偺悺朄傪寁應偟偨丅 埲壓偺恾偵偦偺寢壥傪帵偡丅
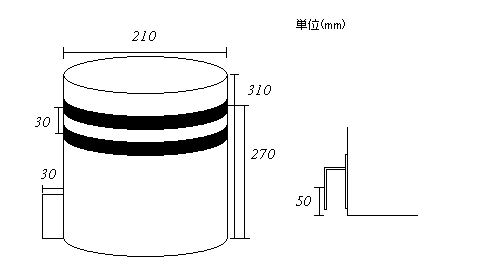 |
Fig.2丂億僗僩偺悺朄 |
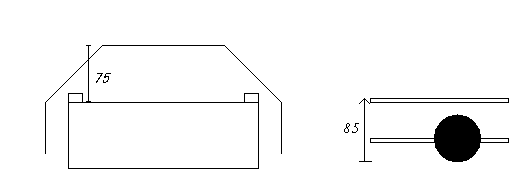 |
Fig.3丂婡懱偺悺朄 |
偙傟傜傛傝丄傾乕儉偺悺朄傪嶼弌偡傞丅
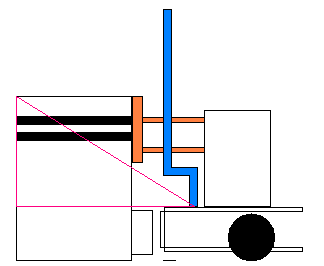 |
Fig.4丂傾乕儉偺悺朄偺嶼弌乮1乯 |
嶰暯曽偺掕棟傛傝
傾乕儉偺挿偝亖併[(310-85)2+(210+30+75)2]亖387佮390[mm]
偙偺抣偼丄傾乕儉偺巟揰偐傜愭抂傑偱偺嫍棧偲側傞丅偙傟偵傛傝丄奺悺朄傪埲壓偵帵偡丅
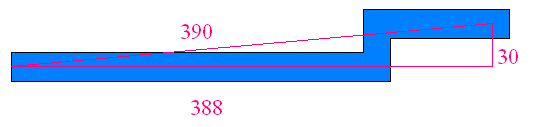 |
Fig.5丂傾乕儉偺悺朄偺嶼弌乮2乯 |
僊傾儃僢僋僗偺峔憿傪攃埇偡傞昁梫偑偁傞偲姶偠偨堊丄 LEGO偺僊傾傪梡偄偰儌僨儕儞僌偟偨丅埲壓偵丄棤昞傪嶣塭偟偨傕偺傪帵偡丅
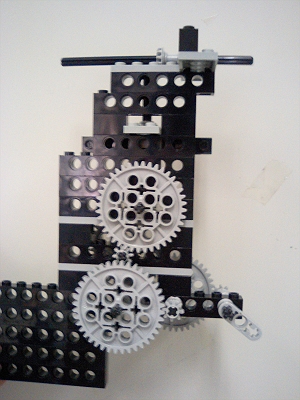 | 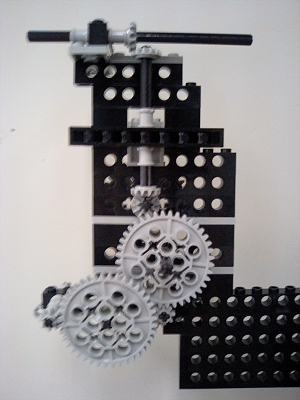 |
Fig.6丂僊傾儃僢僋僗乮儌僨儖乯 |
|
師偵丄堦斒揑側儌乕僞偱偺傾乕儉偺嬱摦偑幚尰壜擻偐敾抐傪峴偆丅 乮嶲峫丗儌乕僞偺僩儖僋M亖8[kg廳丒cm]乯
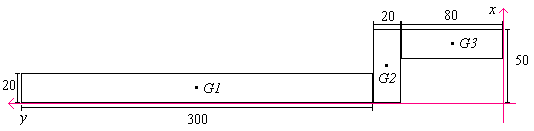 |
Fig.7丂奺傾僋儕儖斅偺廳怱埵抲 |
恾偺傛偆偵丄傾乕儉傪3枃偺斅偵暘妱偟丄廳怱傪峫偊傞丅
倶丄倷嵗昗傪庢傞偲丄奺柺愊偼丄
G1丗60[cm2]丂G2丗10[cm2]丂G3丗16[cm2]
偲側傝丄奺廳怱偼
G1乮1丆20乯丂G2乮2.5丆9乯丂G3乮4丆4乯
傛偭偰丄慡懱偺嵗昗G倶丆G倷偼丄
Gx=1.732 Gy=15.74
偙傟傛傝丄巟揰乮4丆0乯偐傜廳怱乮1.732丆15.74乯傑偱偺嫍棧傪弌偡丅
倰亖15.9[cm]
傾僋儕儖斅偺斾廳偼1.2偺堊丄斅偺懱愊傛傝丄1枃暘偺廳偝偑敾傞丅乮幚嵺偵偼4枃巊梡偡傞乯
86乮柺愊乯亊0.5乮岤偝乯亊1.2乮斾廳乯亖52[g]亖m
偙傟傜傛傝丄埲壓偺晄摍幃偑惉傝棫偰偽椙偄丅
r亊mg亝M
15.9亊52亊10-3亊4亊9.8亝8亊9.8[Nm]
3.3亝8
傛偭偰丄崱夞偺挷嵏偵傛傝丄偙偺婡峔偑幚尰壜擻偱偁傞偙偲偑敾傞丅
5.1丂専摙
傑偢丄擖庤偱偒傞僪僢僩儅僩儕僋僗偵偮偄偰挷傋偰傒傞丅
亅廐寧揹巕 K-798 32亊16僪僢僩LED儅僩儕僋僗昞帵憰抲僷乕僣僙僢僩亅
仭崅婸搙愒怓僪僢僩儅僩儕僋僗C-2AA0SRDT巊梡 仭昞帵柺愊丗80亊40mm乮1暥帤偼40mm妏乯 仭偡偒傑側偔暲傋偰戝宆昞帵婍傪嶌傞偙偲偑偱偒傑偡丅 仭晹昳偼幚憰嵪傒丅LED丒僐僱僋僞丒揹棳惂尷掞峈傪僴儞僟晅偗偡傞昁梫偑偁傝傑偡丅 仭LED僪儔僀僶傪撪憼偟偰偄傑偡丅6杮偺怣崋慄偵傛偭偰僐儞僩儘乕儖偱偒傑偡丅PIC傗H8偱惂屼偱偒傑偡乮儅僀僐儞偼暿攧乯 仭揹尮丗DC5V丂嵟戝1A乮昞帵忬懺偵傛傞乯 仭婎斅僒僀僘丗79亊57mm |
埲壓偵嶣塭偟偨傕偺傪帵偡丅
 |  |
 |
|
Fig.8丂僪僢僩儅僩儕僋僗 |
|
偙傟偲儅僀僐儞偑偁傟偽摦偔偨傔丄側偵傕側偄忬懺偐傜惢嶌偡傞傛傝偼梕堈偱偁傞丅 戝偒偝偼40亊80偲丄MIRS偵偼廫暘忔傞戝偒偝偱偁傞偑丄帇妎揑僷僼僅乕儅儞僗偵梡偄傞偵偼彮偟彫偝偄丅 嵟戝4偮傑偱奼挘壜擻偱偁傞丅偨偩丄憹傗偡応崌偼傕偆堦偮攦偆昁梫偑偁傞丅 愢柧彂偑晅懏偟偰偄偰丄旕忢偵怱嫮偄偲巚傢傟傞丅
偙偺傑傑偱偼掕奿揹棳偵嬤偄抣偑棳傟傞偨傔丄掞峈偺挷惍偑昁梫偱偁傞丅 惢嶌偑斾妑揑梕堈偲彂偄偨偑丄FPGA側偳崻杮偐傜棟夝偡傞昁梫偑偁傞偨傔丄偦傫側偵梕堈偱偼側偄丅 PIC丄傕偟偔偼H8儅僀僐儞偱摦嶌壜擻偱偁傞丅儅僀僐儞偱摦嶌偝偣傞偲CPU儃乕僪偲偺楢実偑庢傟側偄丅 PIC偱摦偐偡応崌丄楢摦偝偣傞偙偲偑晄壜擻偱偁傞壜擻惈偑偁傞丅 PIC偼弌椡傪FPGA偵擖椡偡傞偙偲偼偱偒傞偑丄PIC偵擖椡偡傞偺偼擄偟偄偲巚傢傟傞丅昞帵柦椷偼FPGA儃乕僪偺LED梡僟儈乕傪巊偊偽傛偄偲巚傢傟偨偑丄LCD梡偺僟儈乕偑巊偊側偄偙偲偑傢偐偭偨丅偦偺偨傔丄巊偆梊掕偺側偄僞僢僠僙儞僒傗挻壒攇僙儞僒偺晹暘傪7杮慖傃巊梡偡傞丅
揹棳挷惍梡掞峈 R4,R5 偼390兌偑晅懏偟偰偄傞偑丄偙偙偱偼1k兌傪巊梡偡傞丅 搵嵹偝傟偰偄傞IC偼 TB62706(亊2)丄TB62783(亊2)丄74HC595(亊2)丄74HC04偺4庬椶丄7偮偱偁傞丅
亅奺庬僨乕僞亅
|
丒 TB62706 亅 16價僢僩掕揹棳LED僪儔僀僶 弌椡掕奿 VOUT亖17[V] 丄 IOUT亖90[mA / 價僢僩] 僔僼僩儗僕僗僞偱丄偙傟偵僨乕僞傪擖椡偟偰偍偔偙偲偵側傞丅 IC偼姰惉昳傪巊偆偺偱徻嵶側僨乕僞偼昁梫側偄偲巚傢傟傞丅傑偨丄巇條彂偼搶幣偺儂乕儉儁乕僕偵偰墈棗壜擻偱偁傞丅 丒 74HC595 亅 8價僢僩僔僼僩儗僕僗僞/儔僢僠 弌椡掕奿 VOUT亖亅0.5乣 VCC乮崱夞偼5[V]乯 亄0.5[V]丄 IOUT亖亇25[mA] IC偼姰惉昳傪巊偆偺偱徻嵶側僨乕僞偼昁梫側偄偲巚傢傟傞丅傑偨丄巇條彂偼搶幣偺儂乕儉儁乕僕偵偰墈棗壜擻偱偁傞丅 丒 夞楬 IC慡懱偺夞楬恾偼廐寧揹巕偺儂乕儉儁乕僕偵偰墈棗壜擻偱偁傞丅 慡40PIN丄OUT丗20PIN丄IN丗20PIN丄惂屼怣崋丗6PIN 偱偁傞丅 FPGA撪晹偵夞楬傪慻傑側偄偱巊梡壜擻偱偁傞偑丄LCD偺晹暘傪巊傢側偗傟偽傕偟偐偟偨傜PIN偑懌傝側偄偐傕偟傟側偄丅 GND傗LED揹尮傪徣棯偱偒傟偽丄崌寁12PIN愡栺偱偒傞丅(GND亖9&10PIN丄LED揹尮亖1) |
5.2丂寢榑
偙偺懠偵傕丄揹岝宖帵斅僉僢僩側偳丄儅僀僐儞晅懏偺傕偺偑偁偭偨丅 傑偨丄LED儅僩儕僋僗扨懱偼偝傎偳崅偄抣抜偱偼側偔丄8亊8(40m亊40m)側傜偽100墌偱峸擖壜擻偱偁傞偑丄LED儅僩儕僋僗扨懱偱峸擖偡傞応崌丄 僔僼僩儗僕僗僞側偳偺IC傪峸擖偡傞昁梫偑偁傞偨傔丄寢壥揑偵偍嬥偼偐偐偭偰偟傑偆丅 尰嵼偺挷嵏偱偼丄幚梡揑側僪僢僩儅僩儕僋僗偼廐寧揹巕偺K-798偟偐側偄偲偄偆寢榑偵帄偭偨丅
6.1丂僾儘僌儔儉
6.1.1丂億僗僩僒乕僠
拞怱埵抲偵堏摦偟夞揮偟挻壒攇僙儞僒傪巊偄丄億僗僩偺嫍棧偲妏搙傪婰壇偝偣傞
post.dis[i],post.ang[i]
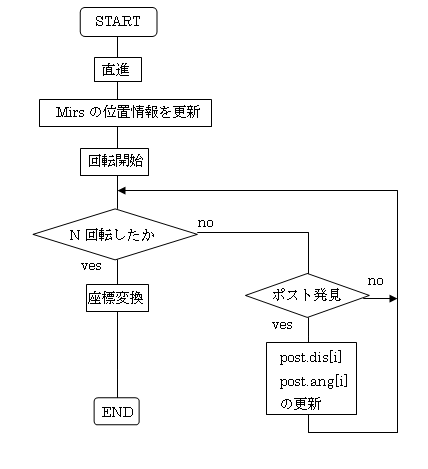 |
Fig.9丂僼儘乕僠儍乕僩乮億僗僩僒乕僠乯 |
6.1.2丂嵗昗曄姺
億僗僩僒乕僠側偳偱摼傜傟偨僨乕僞偐傜嬋嵗昗傪捈岎嵗昗偵捈偟曐懚偡傞丅
py[i]=post.dis[i]*sin(post.ang[i]/180*PI)/ONE_B;
px[i]=post.dis[i]*cos(post.ang[i]/180*PI)/ONE_B;
仸ONE_B偼壖憐嫞媄応堦僽儘僢僋暘偺挿偝
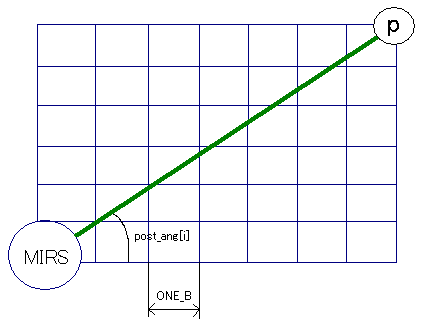 |
Fig.10丂嵗昗曄姺 |
6.1.3丂億僗僩愙嬤嘆
MIRS偑尰嵼偄傞嵗昗偐傜巜掕偝傟偨応強乮億僗僩摍乯傑偱偺愙嬤丅
丒 億僗僩捈慜僽儘僢僋妱傝弌偟乮椺丗倷幉乯
if(m[i]=>py[i]){
sy=py[i]-m[i]+1;
}else{
sy=py[i]-m[i]-1;
}
丒 嫍棧偲妏搙偺妱傝弌偟
sdis=ONE_B*sqrt(sy[i]*sy[i]+sx[i]*sx[i]);
sang=atan2(sy/sx)/180*PI-m[3];
r_time=sang*20;
m_time=sdis*4;
仸ONE_B偼壖憐嫞媄応堦僽儘僢僋暘偺挿偝
丒 堏摦
lqr_rotate(sang,r_time);
lqr_straight(sdis,m_time);
丒 MIRS偺妏搙丄嵗昗偺峏怴
m[1]=sy;
m[2]=sx;
m[3]=sang;
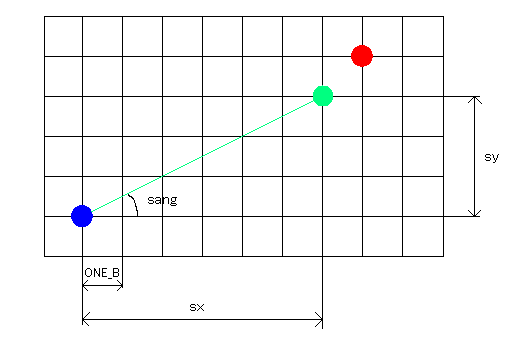 |
Fig.11丂堏摦嫍棧嶼弌 |
6.1.4丂億僗僩愙嬤嘇
億僗僩晅嬤偱億僗僩偲惓懳偡傞傛偆偵曗惓傪偐偗傞丅 偙偺偲偒愙嬤偡傞慜偵曗惓偟偨妏搙傪婰壇偝偣偰MIRS偺妏搙傪峏怴偡傞丅
6.1.5丂億僗僩敾暿
慜柺偺僞僢僠僙儞僒偑墴偝傟偨偲偒丄敀慄僙儞僒4屄偺抣偐傜億僗僩斣崋傪撉傒庢傝偦偺忣曬傪曐懚偡傞丅偙偺偲偒億僗僩忣曬偺峏怴傪峴偆丅
偦偺屻億僗僩僫儞僶乕偵傛偭偰摦嶌傪曄偊傞丅
妉摼偡傞傋偒億僗僩丂仺丂億僗僩妉摼
妉摼偡傋偒偱側偄丂丂仺丂拞怱偵栠傞
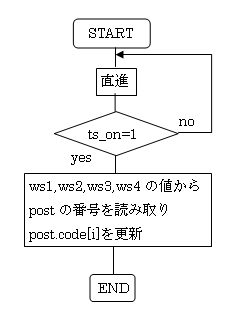 |
Fig.12丂僼儘乕僠儍乕僩乮億僗僩敾暿乯 |
6.1.6丂億僗僩妉摼
儌乕僞傪惂屼偟丄傾乕儉傪崀傠偟偰慜屻嵍塃偵摦偒億僗僩傪妉摼偟偨屻丄傾乕儉傪忋偘傞丅
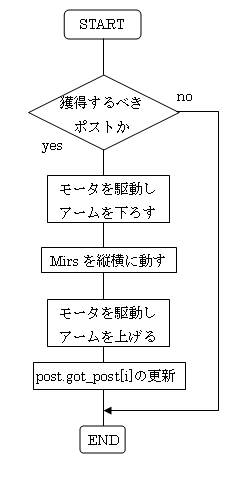 |
Fig.13丂僼儘乕僠儍乕僩乮億僗僩妉摼乯 |
6.1.7丂MIRS埵抲曐懚
MIRS帺恎偺嵗昗傪曐懚偡傞偙偲偱壖憐儅僢僾忋偺埵抲傗妏搙傪妋擣偡傞丅偙偺摦嶌偼MIRS偑堏摦偟偨偲偒偵悘帪峴偆丅
m[i] i=1偺偲偒MIRS偺Y幉偺抣丄i=2偺偲偒MIRS偺X幉偺抣丄i=3偺偲偒MIRS偺妏搙傪擖傟傞
6.1.8丂億僗僩忣曬曐懚
億僗僩偺嵗昗偺娗棟傪峴偆丅億僗僩斣崋丄億僗僩偑妉摼嵪傒偐斲偐側偳丅
6.1.9丂億僗僩埵抲梊應
敪尒嵪傒偺億僗僩偺敾暿傗妉摼偑廔傢偭偨偲偒偵峴偆丅偡偱偵傢偐偭偰偄傞億僗僩偺埵抲偐傜億僗僩偺埵抲傪梊應偝偣傞丅 敪尒偝傟偨億僗僩偺埵抲偲拞怱傪1偲偟丄偦偺懠傪0偲偡傞3亊3儅僗偺崌寁偑0偲側傞応強傪扵嶕偡傞丅 扵嶕寢壥傪曐懚偟忋壓嵍塃偱0偵側傞儅僗偑懡偄偲偙傠偵崅偄桪愭搙傪偮偗傞丅
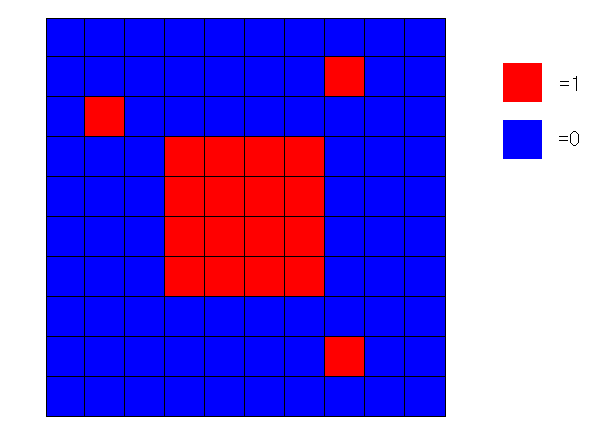 |
Fig.14丂億僗僩埵抲梊應 |
6.1.10丂梊應億僗僩僒乕僠
梊憐偝傟偨斖埻偺嬤偔偱億僗僩僒乕僠傪峴偆丅偙偺摦嶌傪峴偆偲偒偡偱偵敪尒偟偰偄傞億僗僩傪彍奜偱偒傞傛偆偵偡傞丅
6.1.11丂MIRS偺埵抲曗惓
2偮偺億僗僩傛傝MIRS偺埵抲傪曗惓偡傞丅
6.1.12丂僪僢僩儅僩儕僋僗偺昞帵
僪僢僩儅僩儕僋僗傪梡偄偰MIRS偺摦嶌傪昞帵偡傞丅奺摦嶌偵擖傟傞梊掕丅
5.2丂栤戣揰丒壽戣揰
(1) 怴偟偄僞僗僋偺嶌惉曽朄
(2) 儌乕僞丒僪僢僩儅僩儕僋僗偺忣曬偺擖弌椡曽朄
(3) 埵抲曗惓丒億僗僩埵抲梊應偺僾儘僌儔儉
(4) 昗弨婡偱偺娭悢掕媊偺堘偄傪捈偡乮int仺double double仺int乯丂x=(int)y 亙亖倷偺宆傪int偵偡傞
(5) char偱儊儌儕偺巊梡検傪尭傜偡
| 娭楢暥彂 |