1.はじめに
2.外観
3.制作物
4.各部の評価及び変更点
4.1.機体下段部
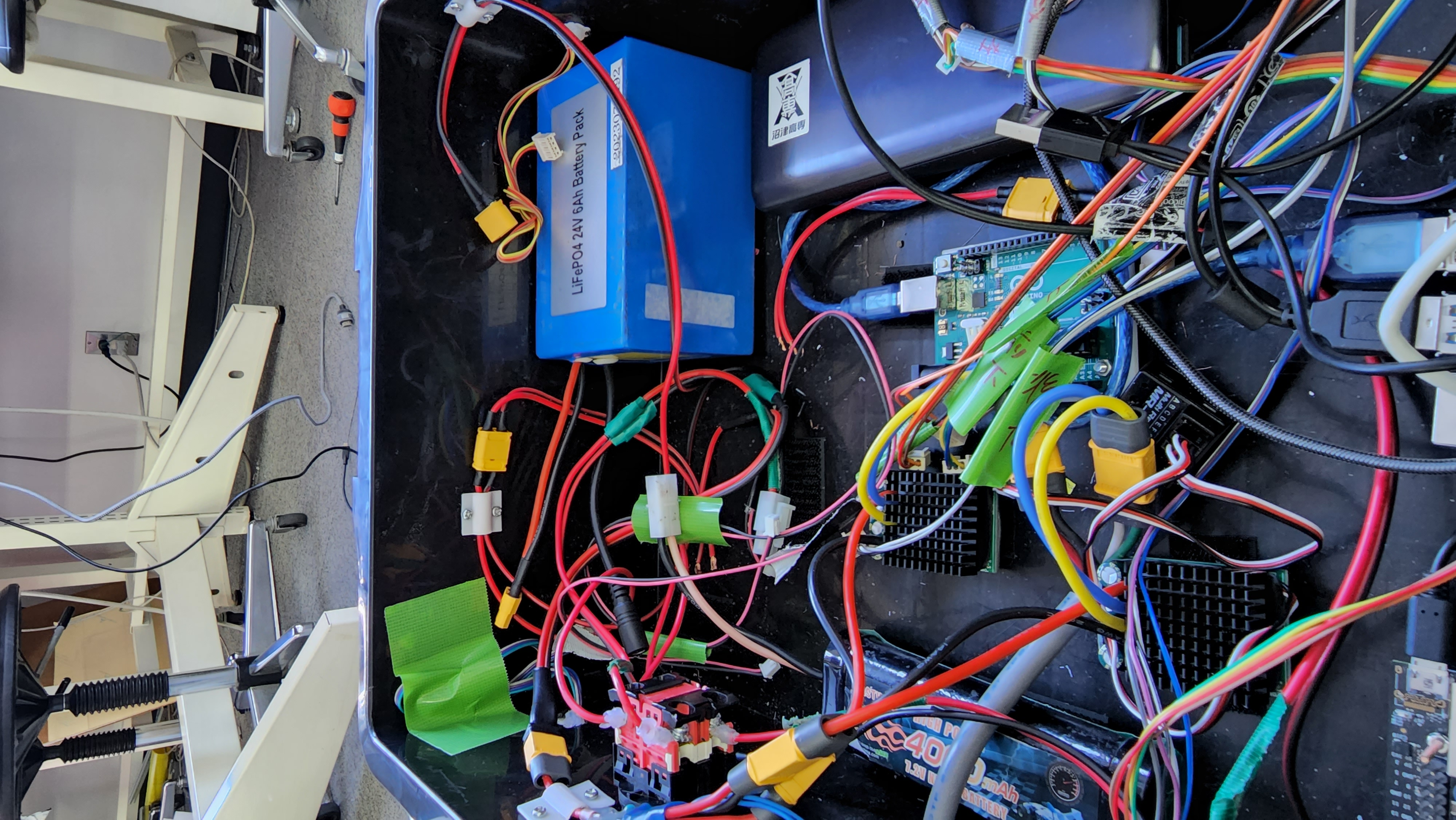
4.2.機体中段部
4.3.機体上段部
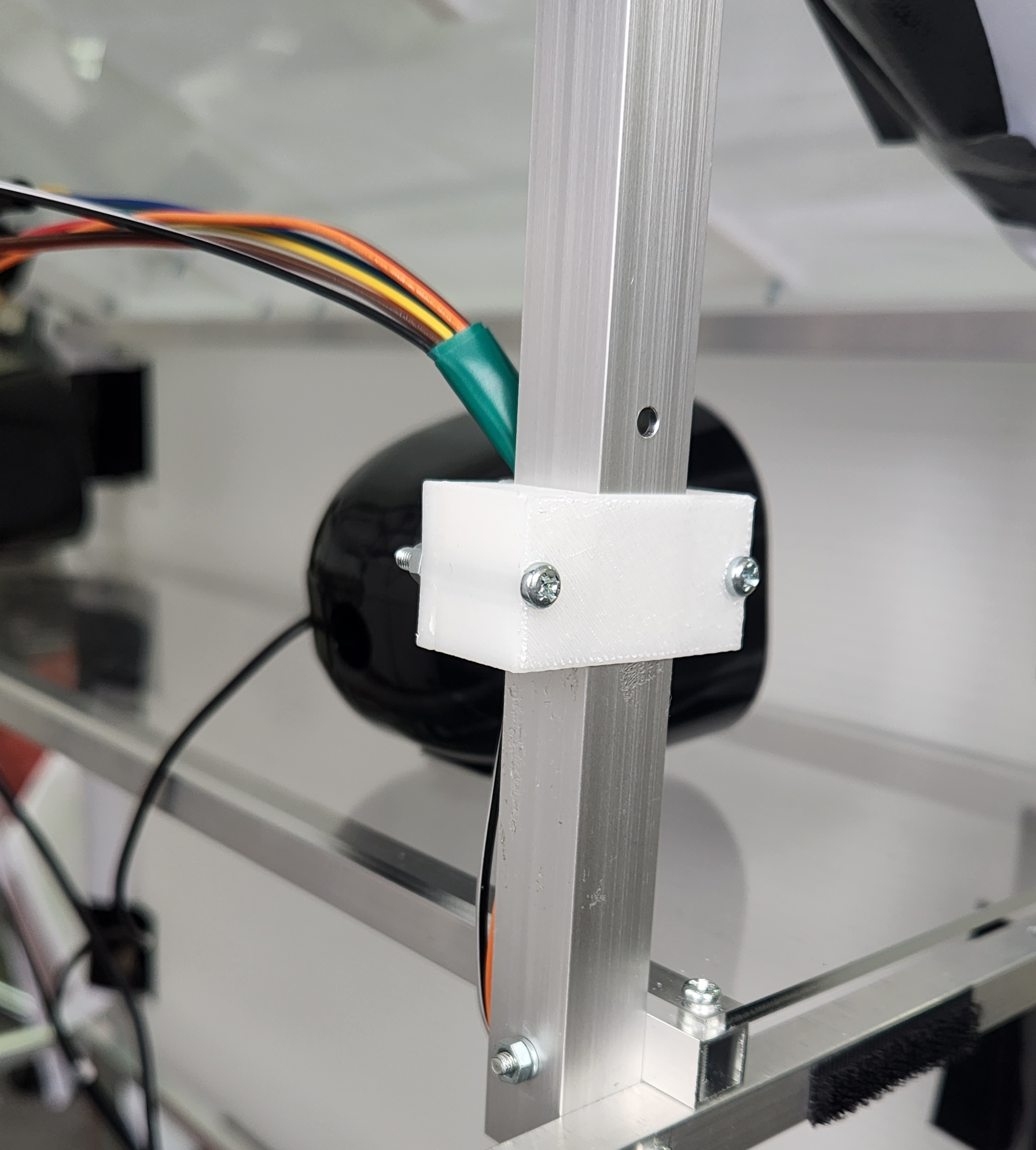
4.4.フレーム
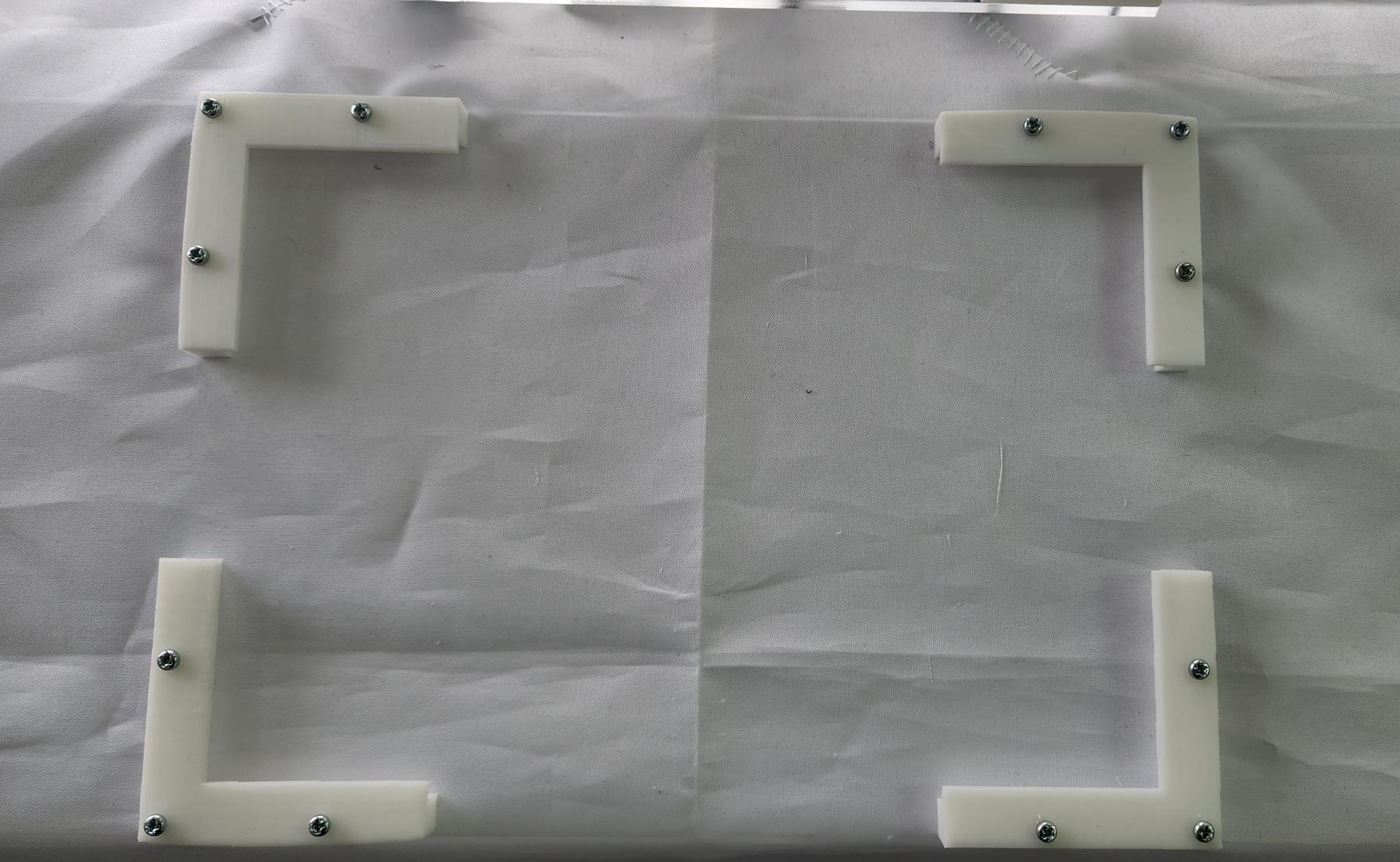
4.5.外装
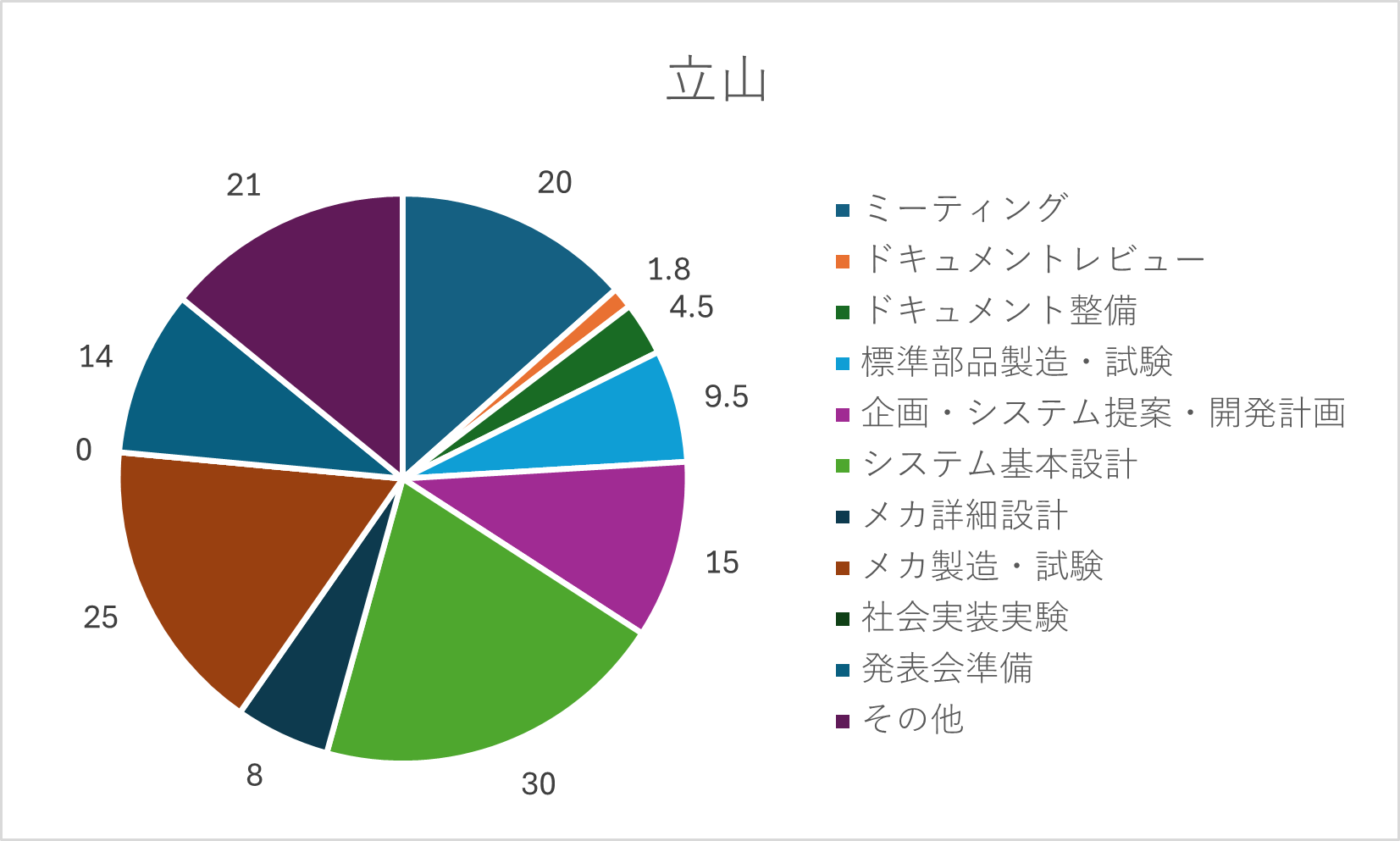
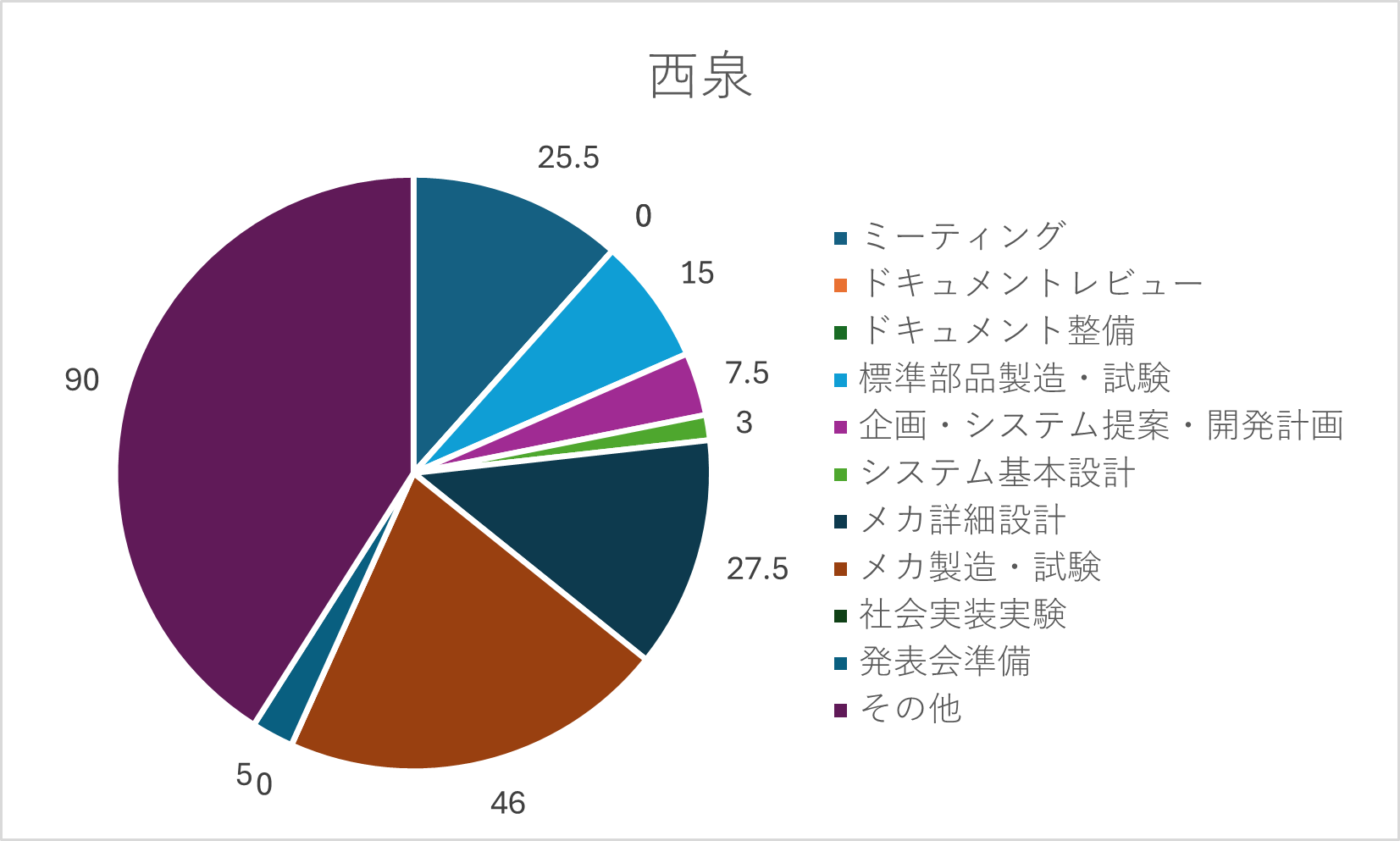
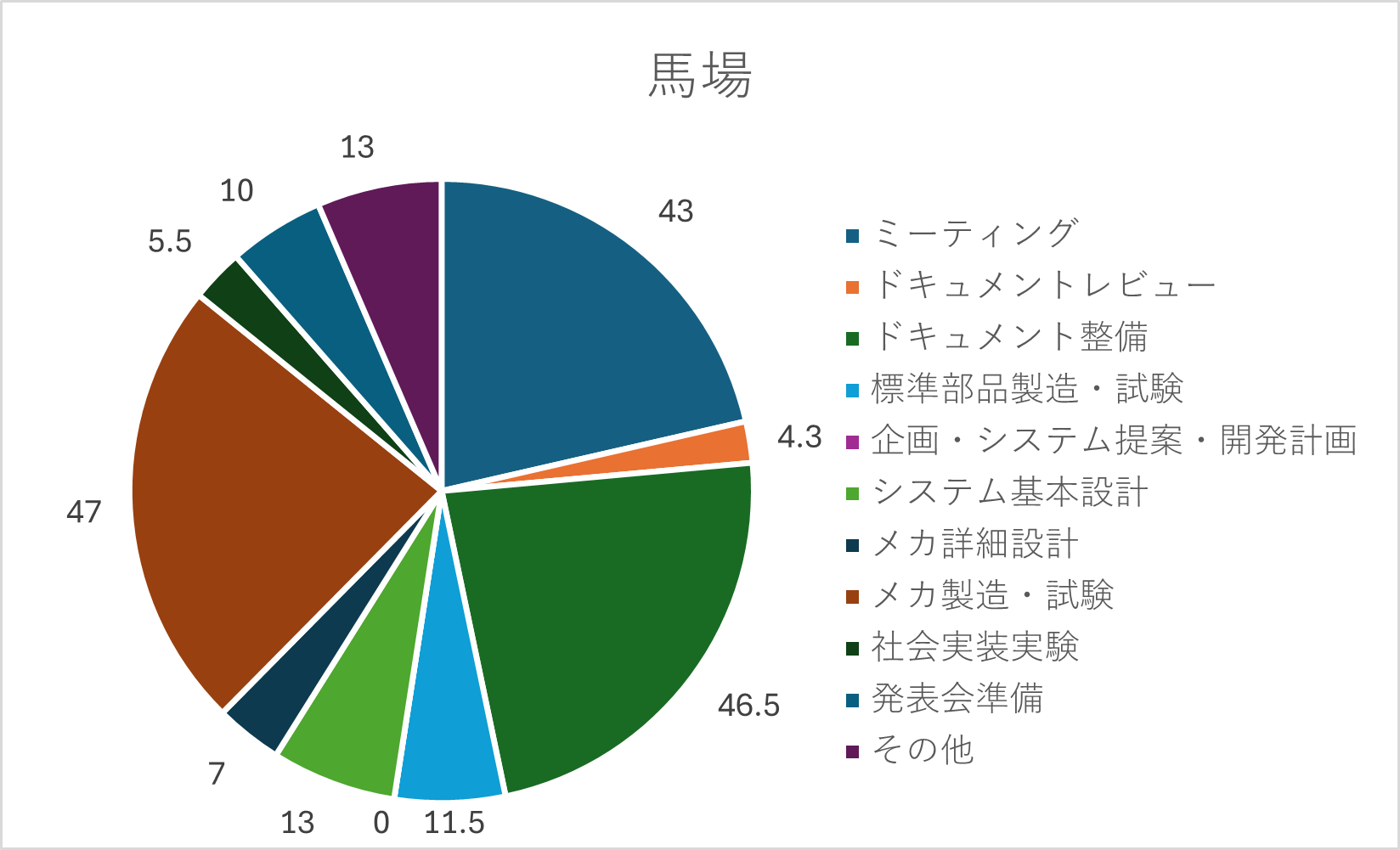
5.工数分析
6.総括
7.メカ詳細設計書へのリンク
8.各開発完了書へのリンク
1.はじめに
本ドキュメントはMIRS2402 KBin_projectのメカニクス開発報告書である。
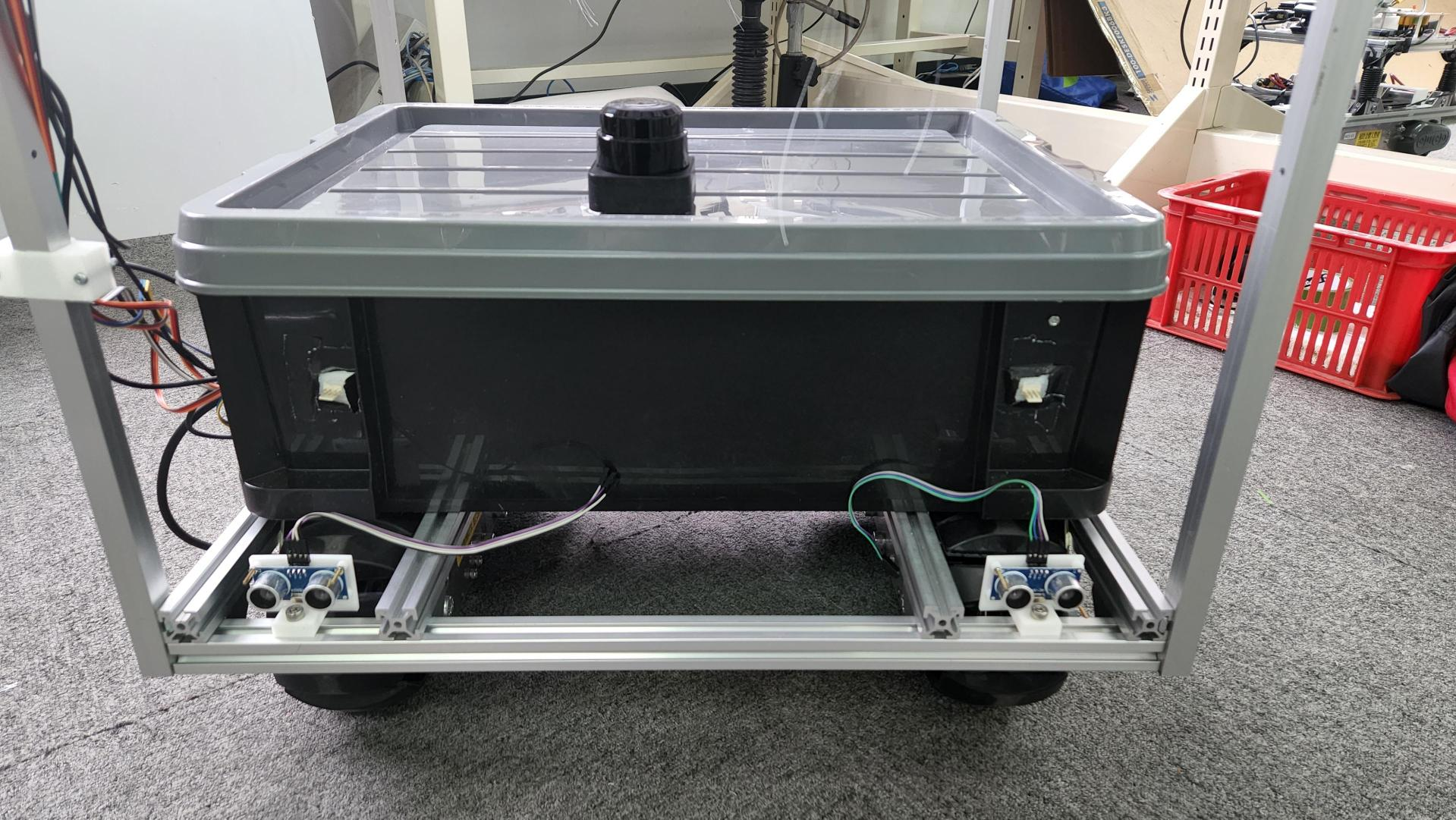
2.外観
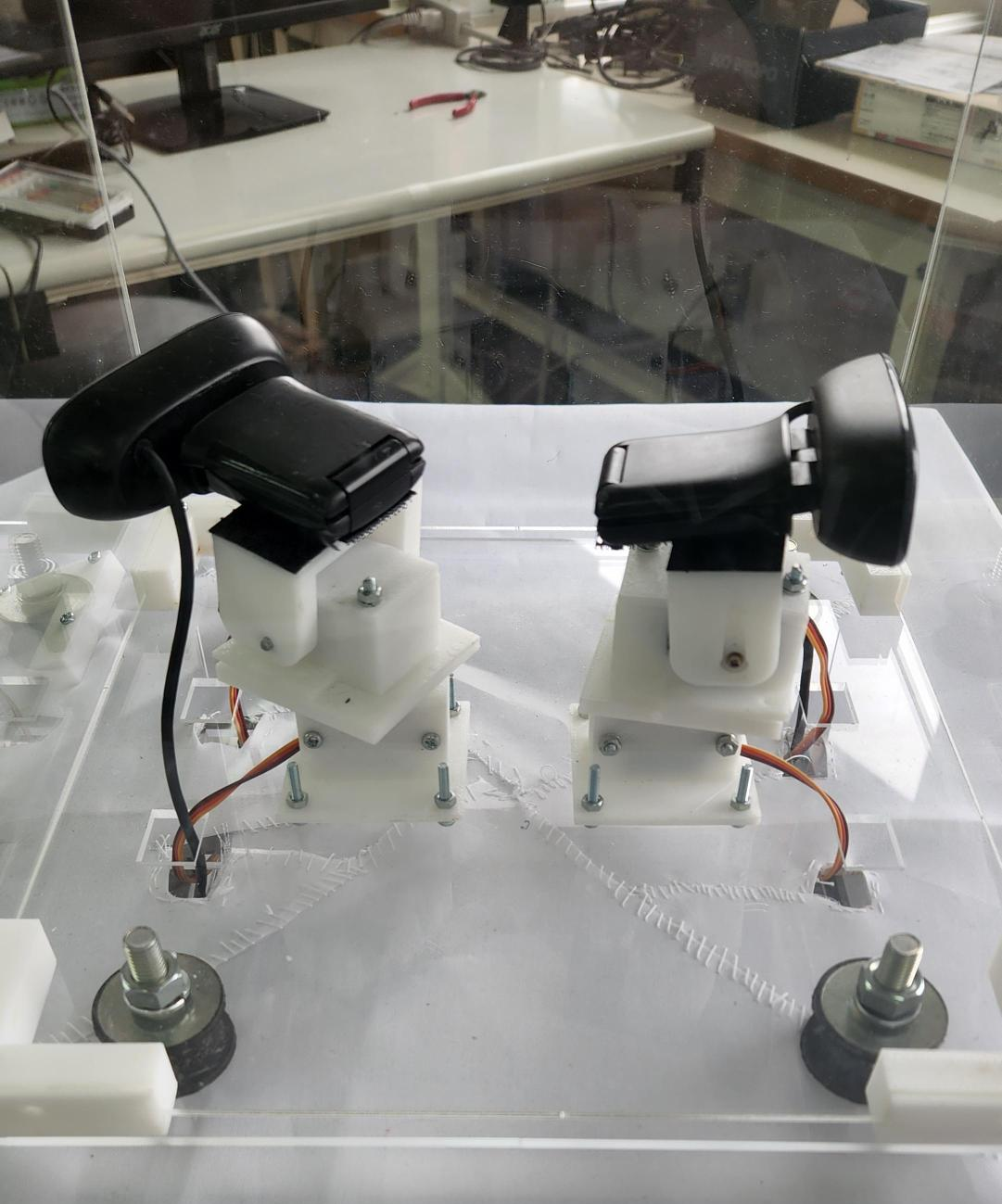
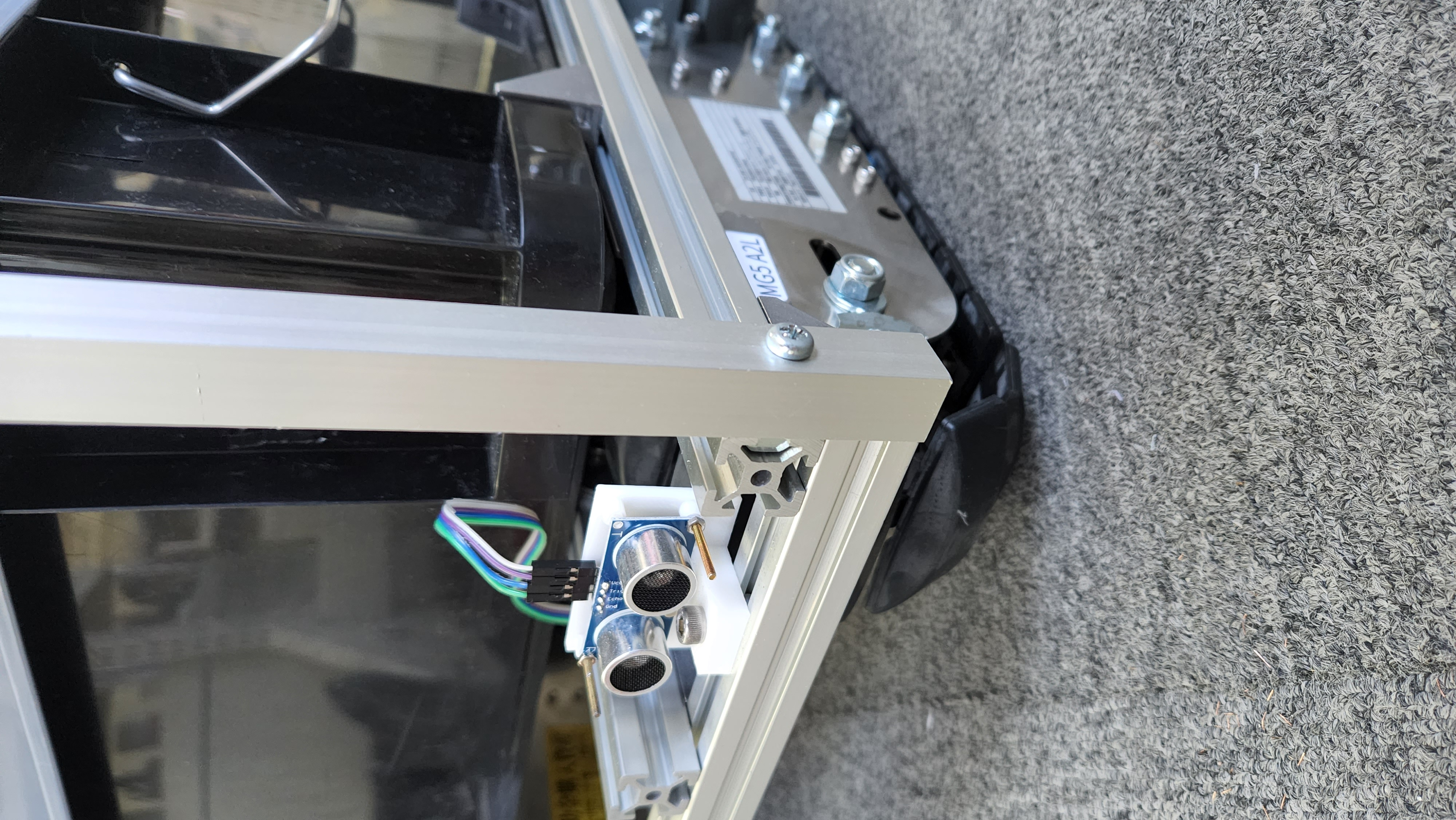
以下にKBin_projectの外観写真を示す。
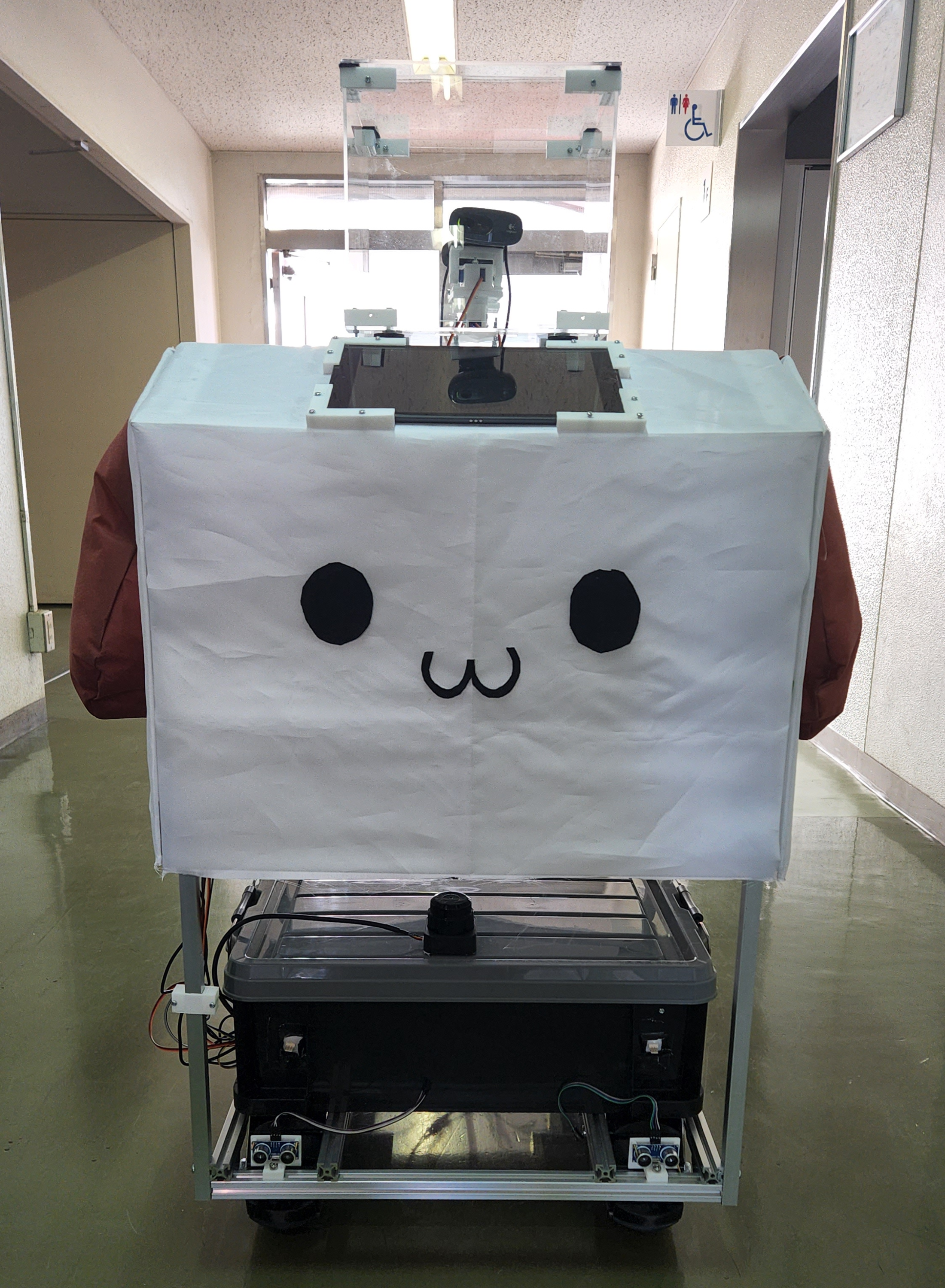
fig1.KBin 前面

fig2.KBin 後面
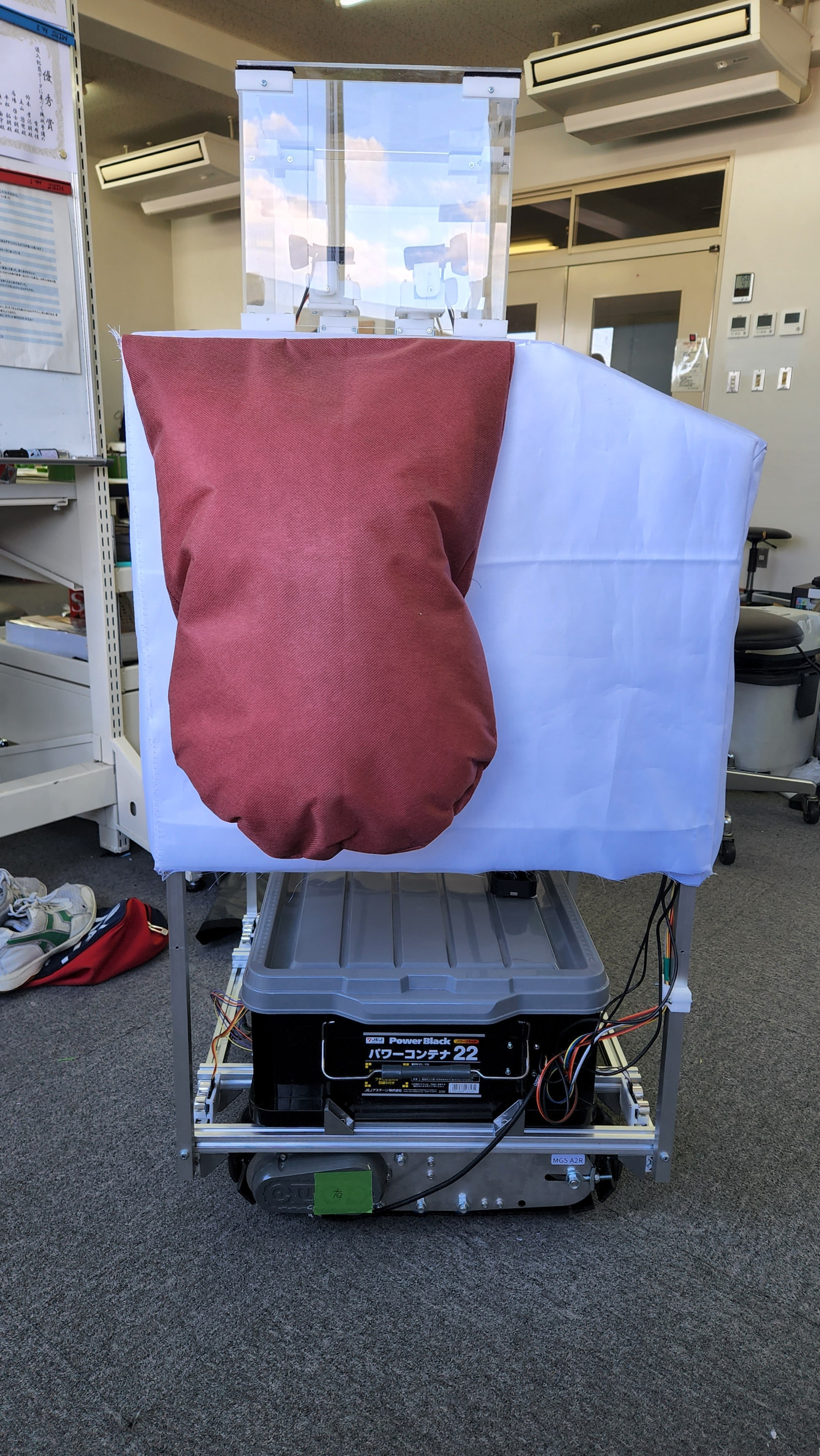
fig3.KBin 右面

fig4.KBin 左面
|
|
|
|
|
|