| 名称 |
MIRS2402 開発完了報告書 |
| 番号 |
MIRS2402-REPT-0004 |
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A01 |
2025.02.14 |
馬場 啓士朗 |
大沼巧 |
初版 |
目次
本ドキュメントは MIRS2402 KBin Project の開発完了報告書である。
製作した機体をfig1,fig2に示す。

fig.1:KBin 前面
|
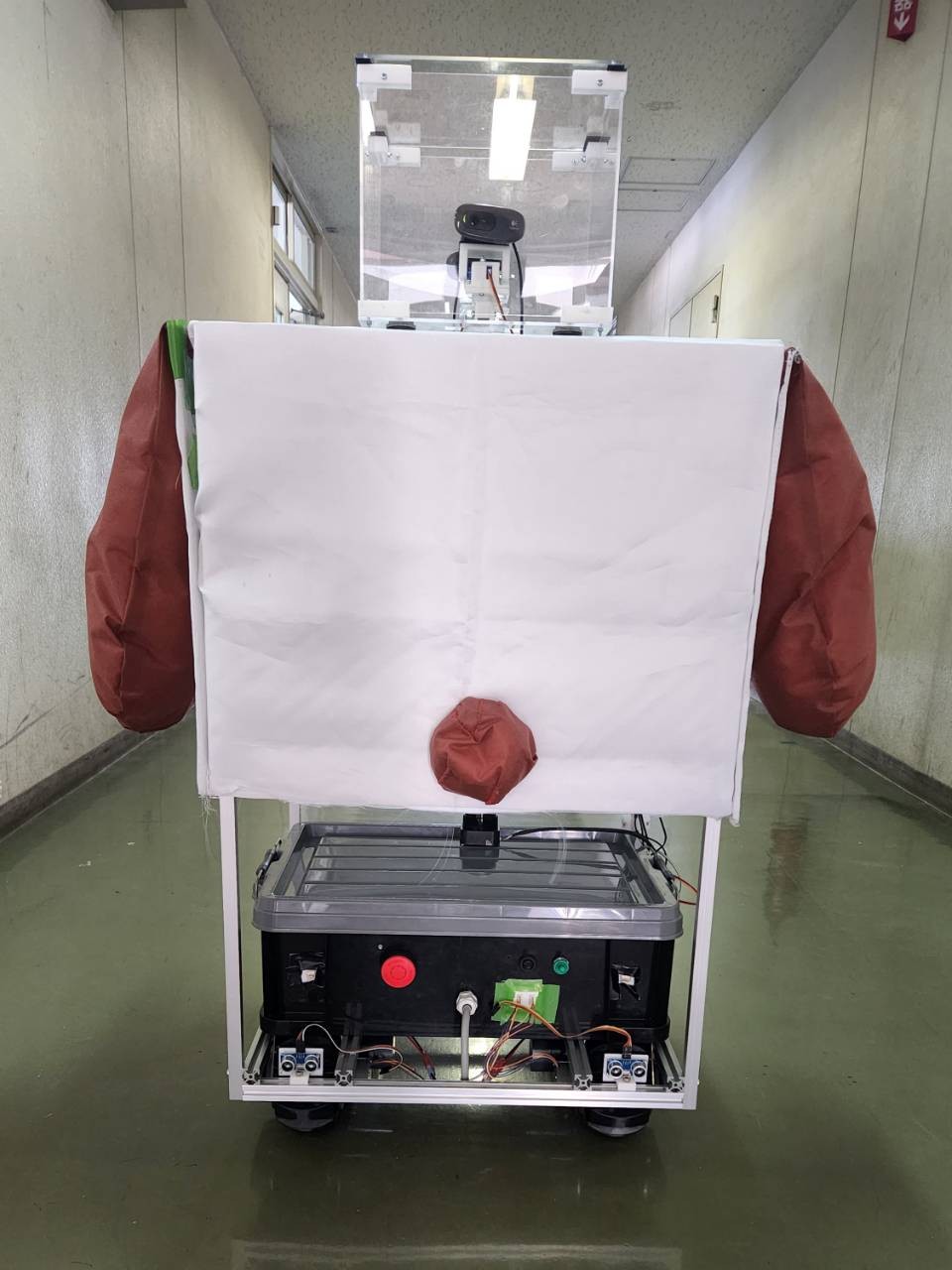
fig.2:KBin 後面
|
予定していた開発日程表と実際の作業日程表を示す。
fig.4:予定の日程表
fig.5:実際の作業日程表
メカ全体の役割分担としては、基本設計、詳細設計ともに立山がほぼ一人で行い、センサマウントや基盤マウント、ケーブル固定パーツ等の細かいパーツの設計・制作を馬場が担当し、機体の外装・装飾については、西泉が主に担当した。
フレームなどの加工・3Dプリンタでの部品製作については、3人全員が担当し、工場でのレーザーカットの加工のみ立山が一人で行った。
基本設計、詳細設計の段階で、設計の分担がうまくできずにほぼ立山が一人でやるような形になってしまったので、基本設計段階でのガントチャートに比べて、設計・制作ともに遅れが多少生じてしまった。
これは、設計を主に一人が担当したことにより、設計の概要を完全に把握している人間が1人しかいなかったからであると考えられる。
ただ設計の遅れは生じたが、機体の完成時期はほかの班よりは早かったと思われる。
外装に関しては、詳細設計の段階では、大まかなデザインと取り付け方しか考えていなかったが、装飾作業でチームロゴのようにかわいらしいイメージ通りの外装が完成したので良かったと思う。
反省点としては、ミルス発表会当日に見せれる機械的な機能がパン・チルト機構しかなく、具体的な機能・特徴が分かりにくかったのではないかと感じた。そのため、発表会で見せれる機械的な機能をもっと
取り入れたほうが良かったと振り返ってみて思った。(昇降機構といった一目で分かる機械要素を取り入れれば良かった)
新しい世代になり標準機開発に手間取った。
しかしそれ以外の開発を効率よく作業することで比較的早めに作業を終わらせることができた。
とくにESPを使うかどうかすら基本設計では決まってなかった。
そのためソフトが決定させるまでの間、ESPの有無の影響がない電圧監視回路などを製作し無駄な待機時間を減らすことができた。
ESPを使うことが決定した後の全体のシステム構成図や接続図を丁寧に作り、それを基にした基本設計や詳細設計も丁寧に作ったことで実際に制作するうえで問題は生じなかった。
評価実験含めて順調に製作が進み、統合後の不具合もなかった。
よってエレキの立場では設計通りの製作を行うことができたといえる。
設計をするうえで事前に何をいつどうやって作るかを丁寧に設定することは製作作業を円滑に終わらせられることだけでなく、チームメイトが不在の際の問題を未然に防ぐことや他のメカやソフトがかかわる仕事を明確にし連携をスムーズに行えることができることのような多くのメリットを持つことであり、その重要性を今回学ぶことができた。
今回のソフトウェア開発では、ROS2を用いた走行機能、カメラ撮影機能、音声処理機能の主要な機能をすべて実装することができた。
また、Raspberry PiとJetson Nanoで役割を分割し、走行系とデバイス操作系の効率的な構成を実現した点は評価できる。
しかし、開発においては反省点も多く存在した。
まず、ROS2の実装に時間を要したため、超音波センサや加速度センサを利用した走行支援機能の実装が行えなかった点が挙げられる。
また、すべてのコードを完全に統合することができず、最低限の機能以上の追加が実現できなかった。
さらに、実装実験時の走行では十分な成果を得ることができなかった。
これらを踏まえ、今後の開発ではスケジュール管理をより徹底し、主要な機能の安定化に加えて拡張機能の実装も目指すべきである。
また、各モジュールの統合を進めることでシステム全体の完成度を高め、実験時の成果を向上させる必要がある。
各班員の所感を以下に示す。
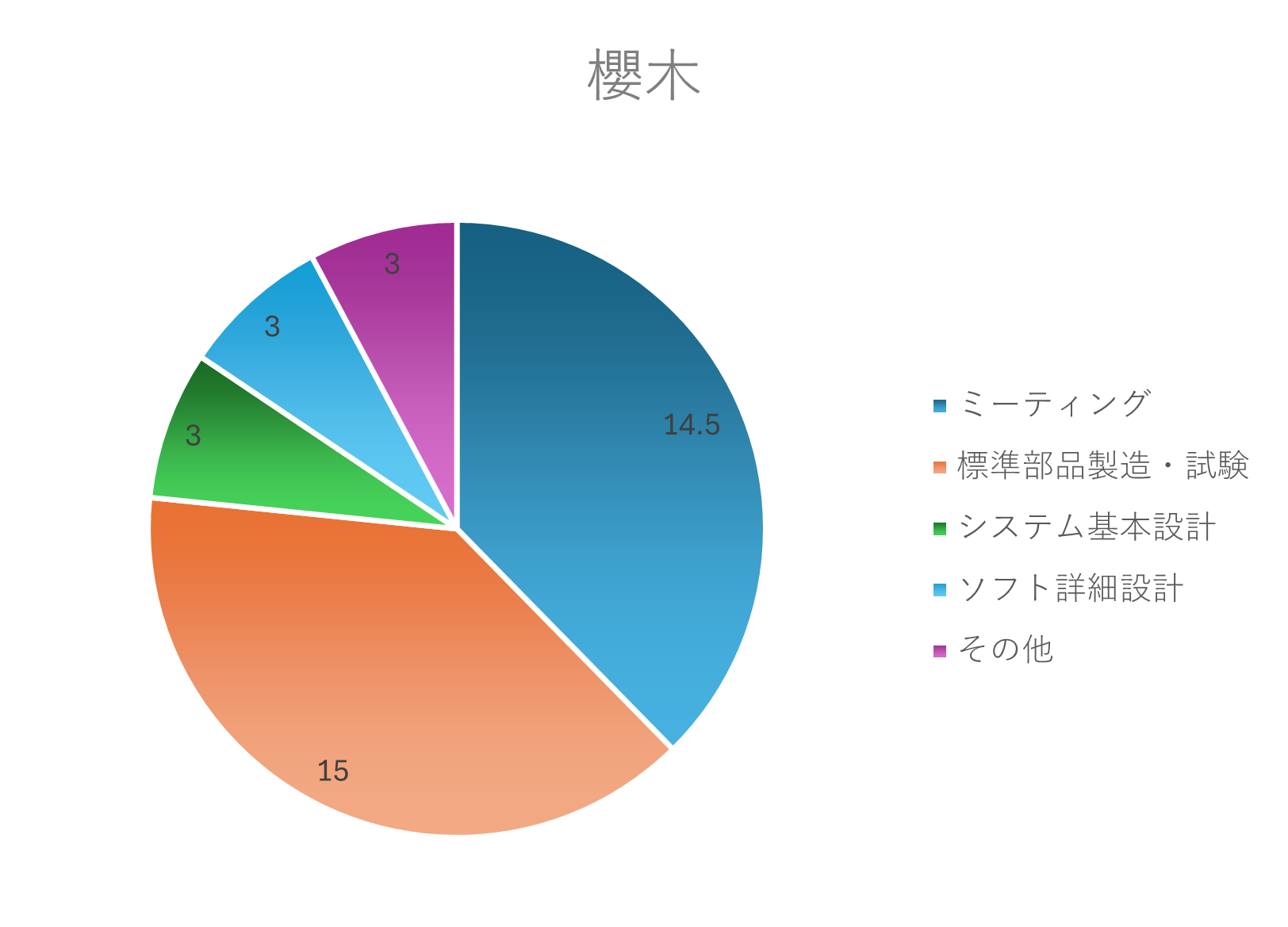
櫻木 颯:エレキ
元々ソフトの希望だったけれど、エレキに異動してからは降圧コンバータを最初に作った。
適切なパーツを探して自作で降圧コンバータを作っている時は、元々セットの様な形になっていたショットキーバリアダイオードが販売終了していた為にほぼ同じ性能の別の会社のダイオードを用意したが、性能の耐久性の面などを始め所々に不安があり、実際に試すまで「無事に動くかな」という気持ちで一杯だったが、試運転で無事に降圧できて、最後まで壊れる事無く無事に降圧コンバータの仕事を果たしてくれたのが良かった。
はんだを使っての回路作成も少しズレてくっついたりしたらショートしてしまう為に細心の注意を払う必要があり、慎重になる必要があってかなり気を遣ったが、つけ終わってショートしていないのを確認できた時は心配事が一つなくなった気分になって達成感があった。
トグルスイッチ周りの固定なども、整備周りを楽にする為に所々を切って取り外し可能にする時熱収縮チューブやグルーガンを利用して、端子が千切れたりしないように努力している時は楽しかった。
最終的に作った回路が中に入って無事に動き始めた時は達成感もあって、総合的に授業を通して見れば楽しかったと思う。
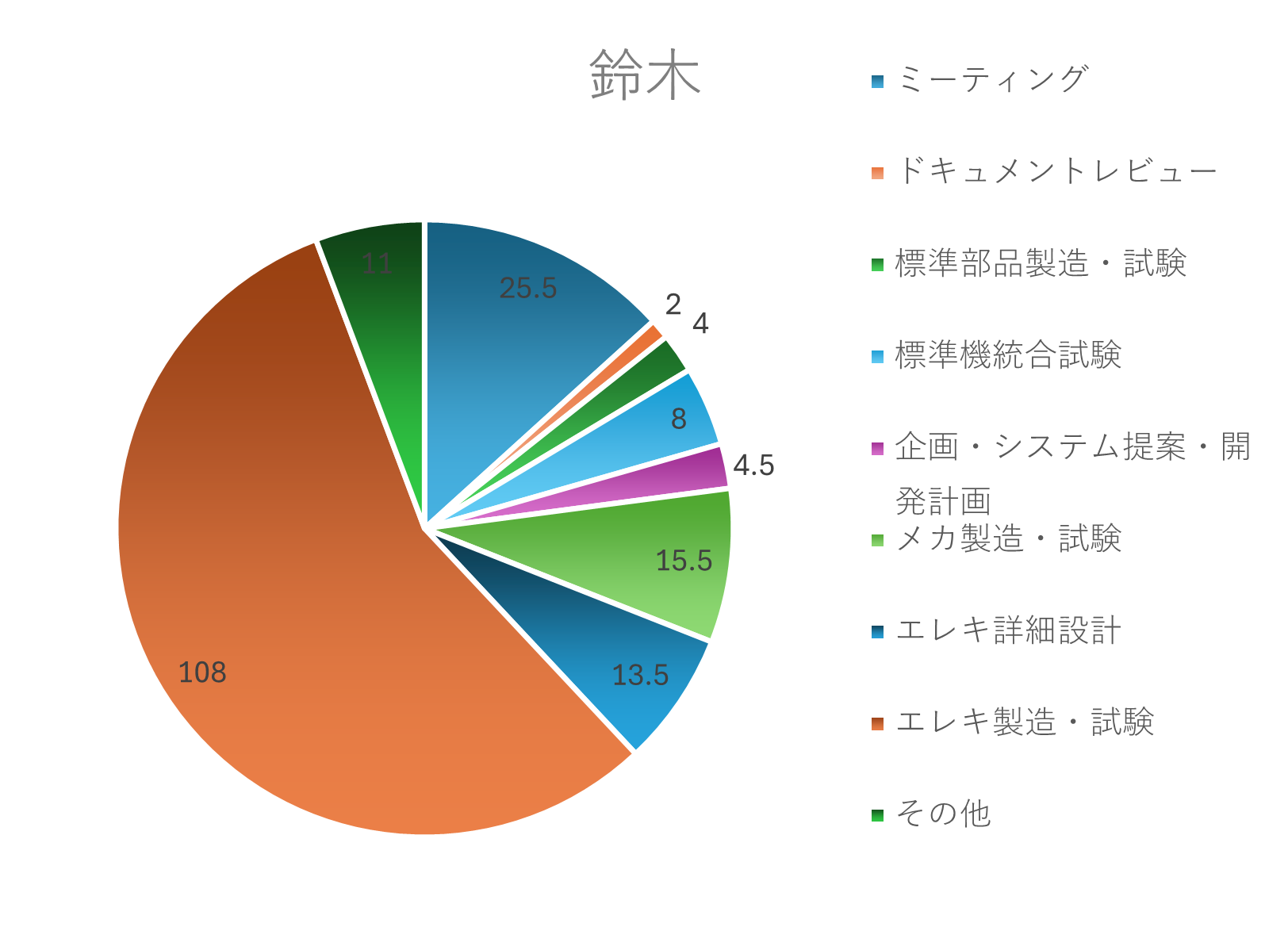
鈴木 孝汰朗:エレキ
今回のMIRSで多岐にわたる作業を経験し、特にハードウェアの配線や基盤作成、3Dプリンタを活用した部品設計に深く関わることができました。
課題解決の試行錯誤を繰り返しながら、チームと連携して形にしていく過程がとても充実していました。
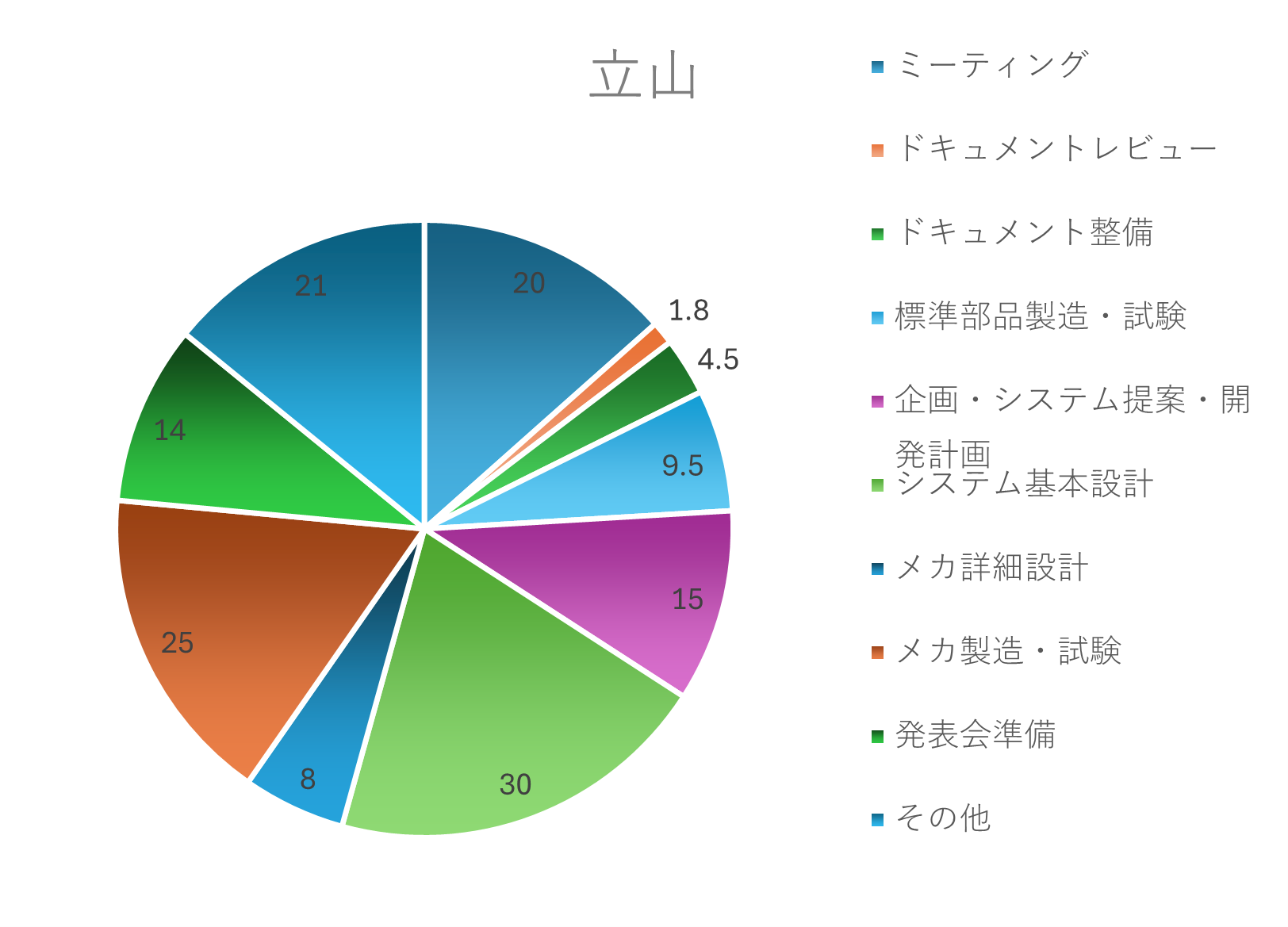
立山 悠世:メカ/TL
MIRSではメカとチームリーダーを担当した。
メカにおいて担当したのは、メカの設計と加工、制作の全般を担当した。全員で3人いるメカのメンバーをまとめながら、機体の設計・製作を行った。
今回のMIRSの活動を通じて、メカの設計の分担の重要性(分担がしっかりできていないことが要因で機体の全容を把握している人員が少なかった)や
チームで一つのものを情報を共有しながら製作するといったことの難しさというものを学ぶことができた。
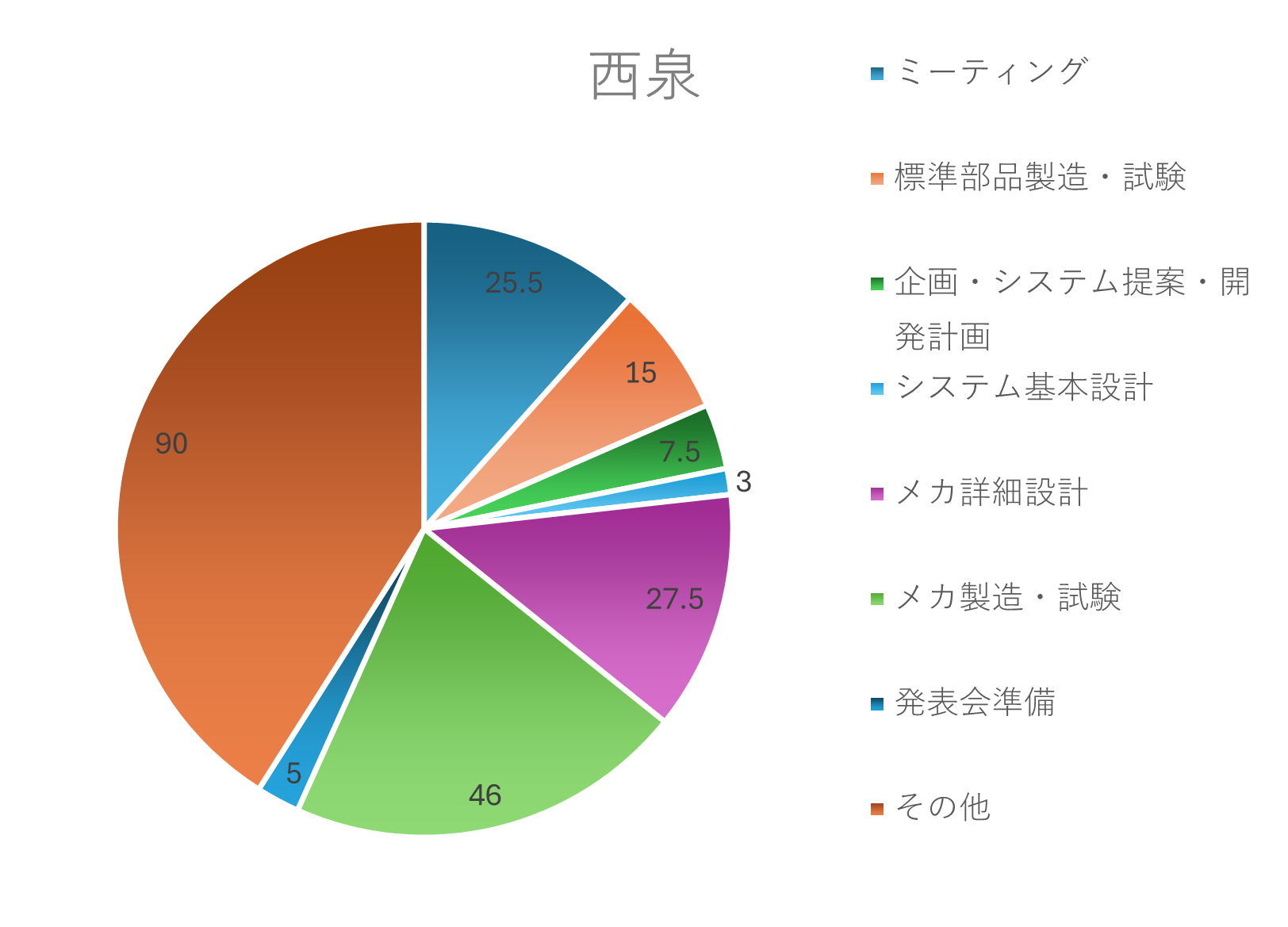
西泉 俐希:メカ
私は本体外装や広報関係の作成を主に担当した。
KBinの可愛い見た目を再現するため、どういった外装にしたらいいか、また人の注目を集めるためどのような宣伝にしたらいいかについてとても悩んだ。
また、メカとしての加工作業を通して様々技術を得ることができた。今後このような経験を活かしていきたい。
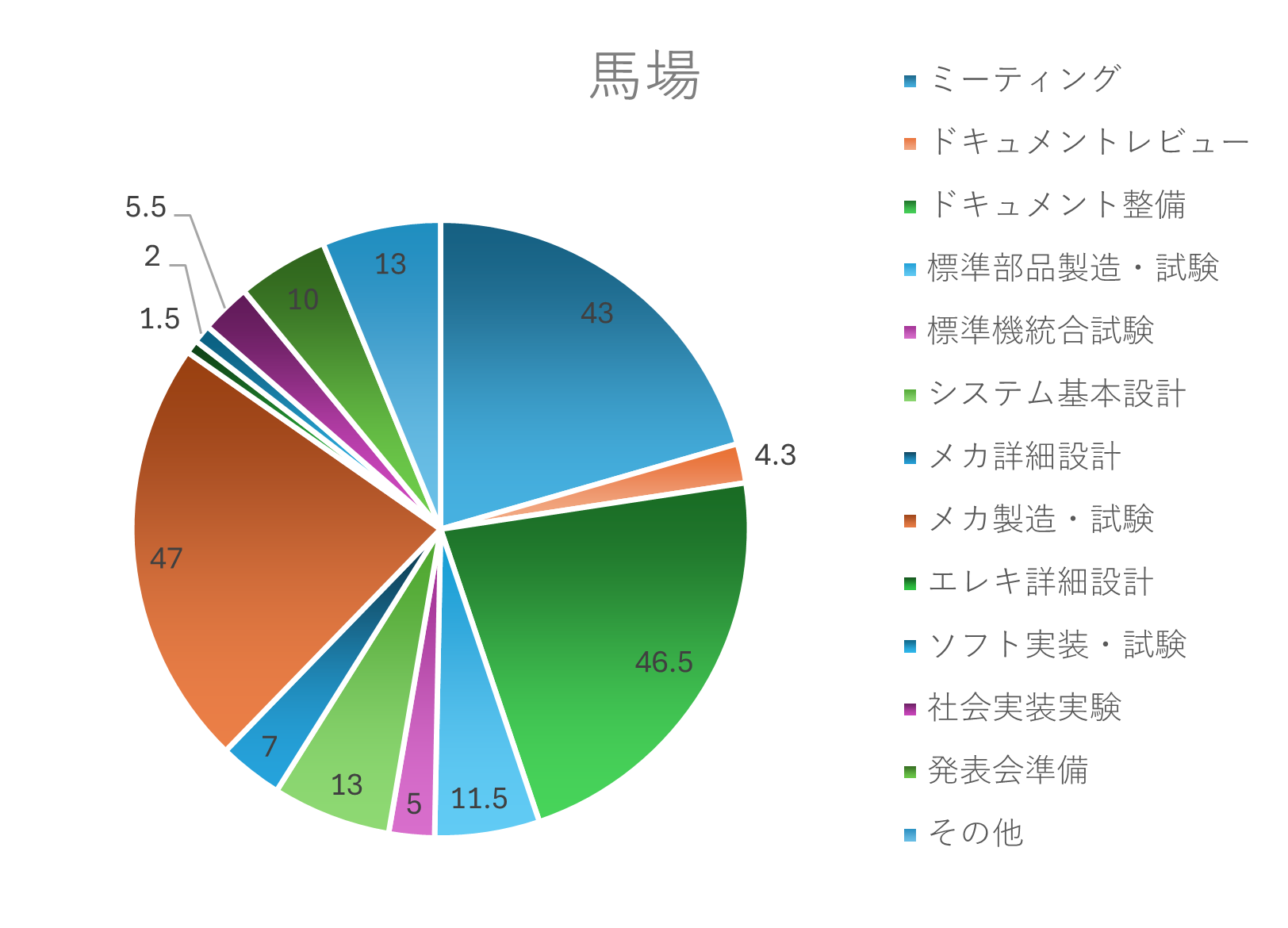
馬場 啓士朗:メカ/DM
MIRSではメカとドキュメントマネージャーを担当した。
メカではCADや3Dプリンターの知識を基盤マウント設計・製作などで活かすことができた。
また、MIRSを通して様々な計画や設計を行いものづくりにおける準備の大切さを実感した。
ドキュメントマネージャーとしてはHTML作成関わったことでWebアプリのテスト版作成に活かすことができ、良い経験になったと思う。
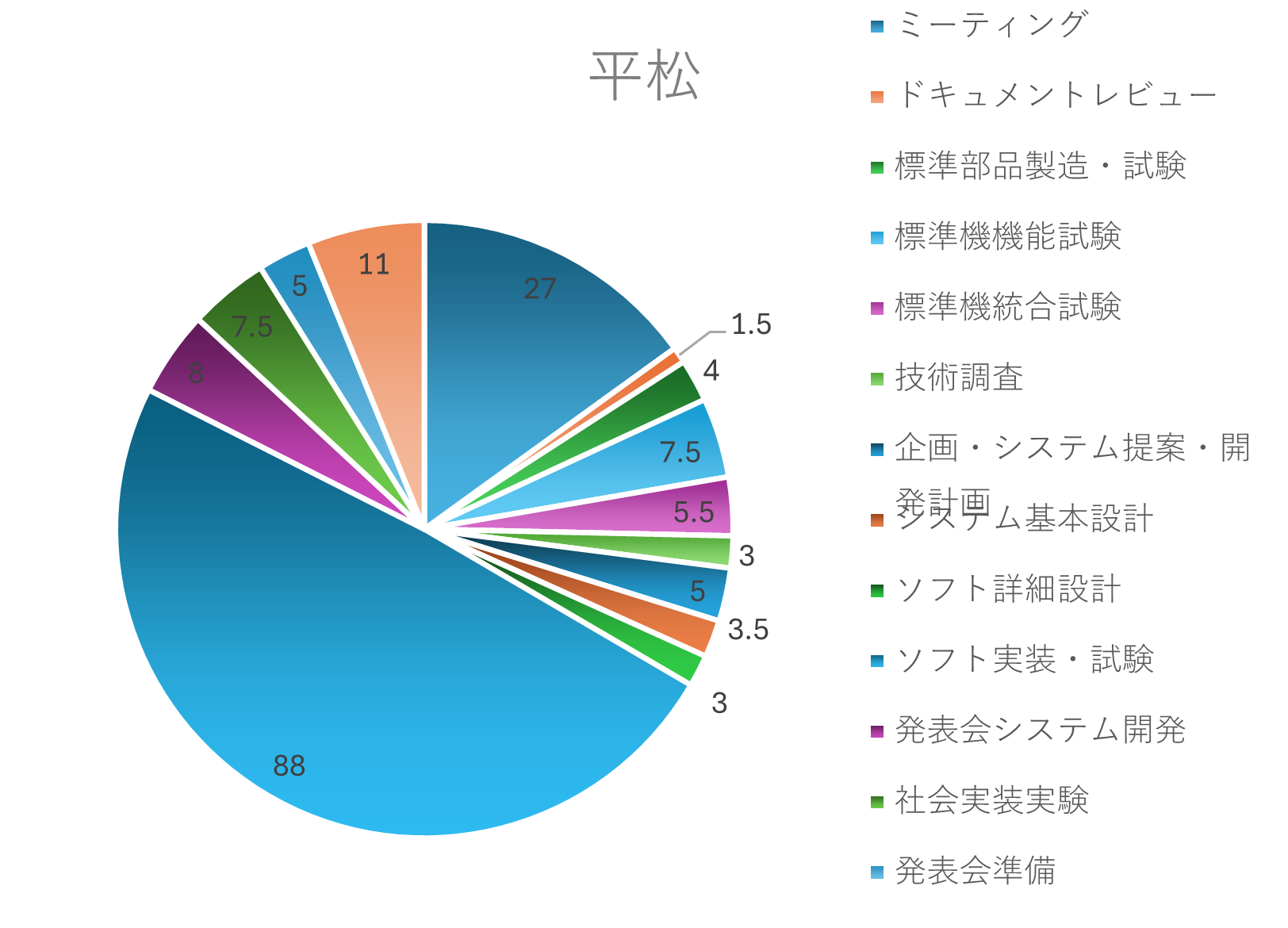
平松 拓朗:ソフト
私はソフトを担当しました。
ソフト班3人の中で私は補佐的役割をし、メインプログラムではなくデバイス関連のプログラムや既存のプログラムの統合などを進めました。
初めてチームで開発を行い感じたことは、チーム開発にはコミュニケーションが不可欠で能力や熱量の差異によるすれ違いが起こりやすいということです。
私たち班は仲良くやり切ることができたと思いますが、1年以上の開発などもっとシビアな条件で仕事をするとなった時に大変だなと感じました。
チーム開発の空気感を体験できたことが私にとって1番の収穫です。
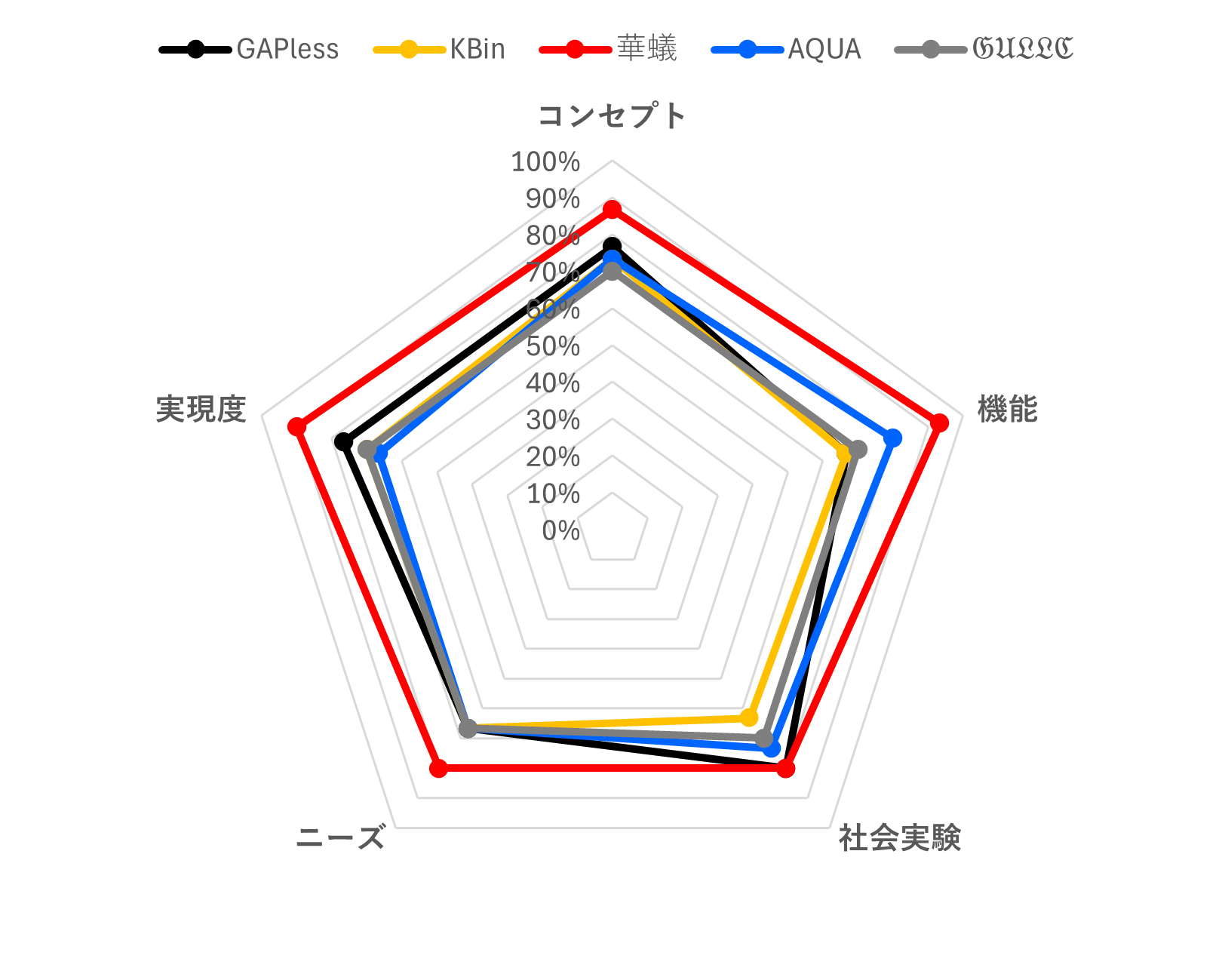
全体として私たちのロボットの出来は最高です。
他の班に比べはるかに多い機能と顧客にウケやすい外見、UIを有しています。
各々の協力なしでは達成してなかったものなのでチームメイトには本当に感謝しています。
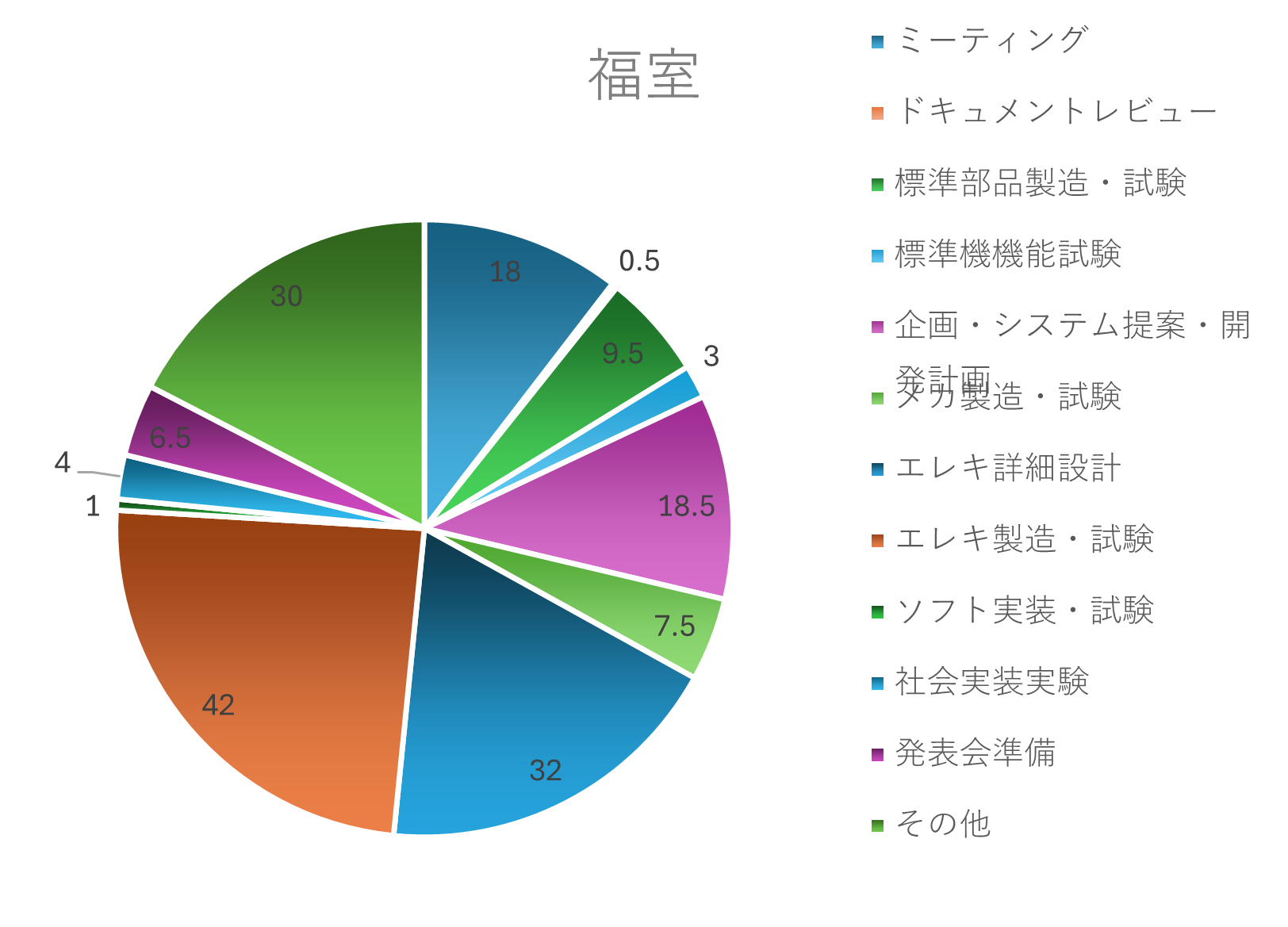
福室 颯人:エレキ
ロボット制作の分野はあまり詳しくなかったので、どんな部品を使うかなど考える分野に関しては班員に助けてもらったことが多かったと思います。
特に同じエレキの鈴木や櫻木は頼りになりました。
その代わりはんだ付けなど私にできることは積極的にやりました。
またメカとはよく連携して効率良く作業出来たと思います。
3Dプリンター関連では馬場と、それ以外の機体全体についても立山とよく相談させてもらいました。
一方でソフト担当とはあまり連携できず、メカエレキは暇なのにソフトが忙しいような時間が多かったと思います。
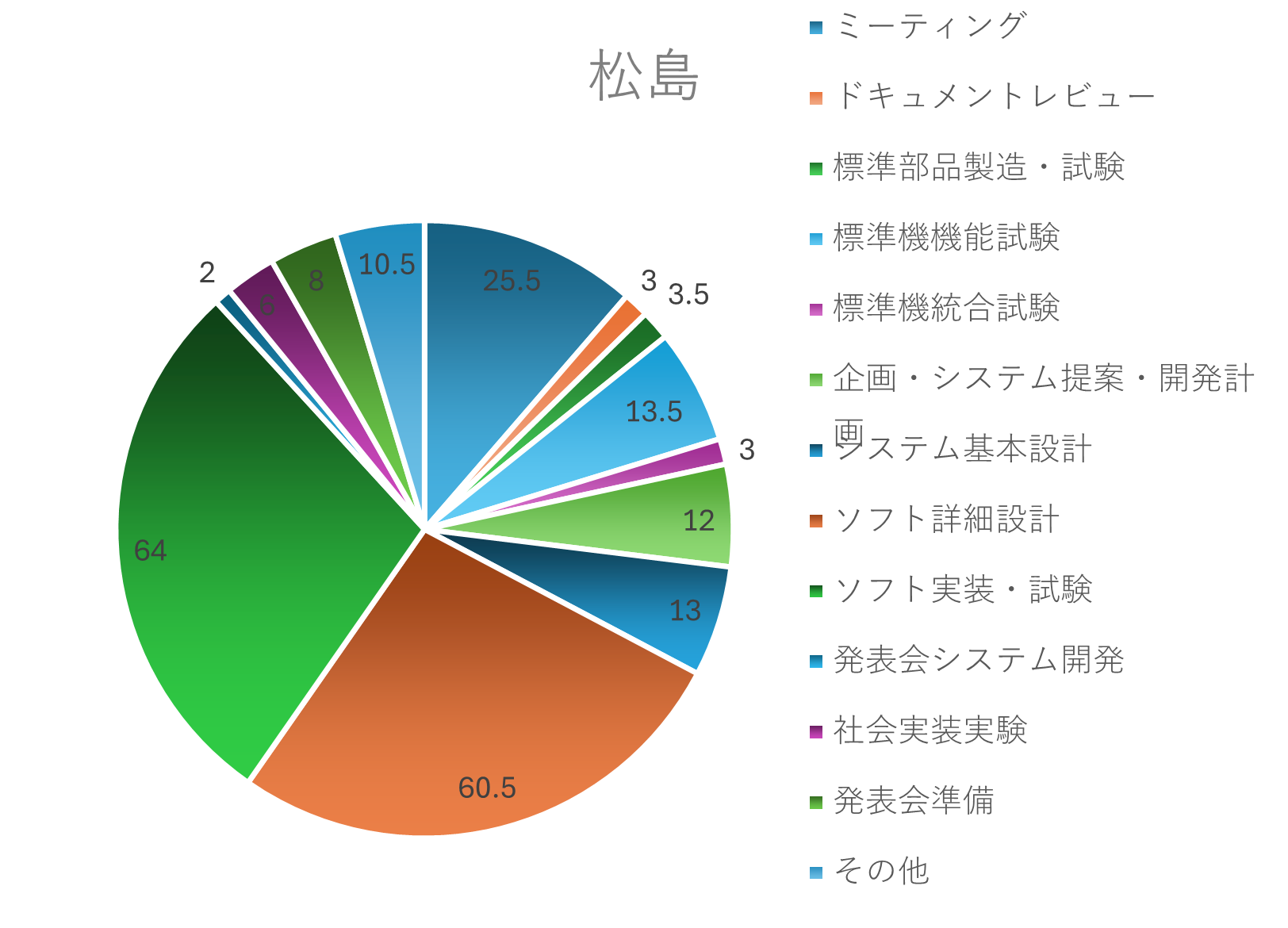
もう少し横山や平松、松島の負担が減るように私にできる仕事を探したほうが良かったかなと思います。
そして制作以外にできる仕事は自分から見つけられたかなとも思います。
ロゴ制作やポスター資料等は西泉や松島と協力出来たと思いますし、アンケートを作りデータ収集と分析をしたことで班に貢献できたかなと思います。
自分から仕事を探すことの難しさと重要さ、そしてチーム全体で連携を取ることの大切さを学ぶことが出来たと思います。
松島 明寛:ソフト/PM
ソフト開発のうち、走行機能の開発を担当した。
ROS2の実装に苦戦し、理想の走行は実現できなかったが、目的地を選択し、走行するベース部分は開発できたので、及第点ではあると思う。
超音波センサや加速度センサの実装を実現できず、自己位置推定や安全性の向上が不十分だったとも考える。
また、プロジェクトマネージャーも担当した。
開発期間の計画が甘く、残業の時間がとても多くなってしまった。
開発計画の作成の難しさやチームメンバーの力量の理解、メンバーとのコミュニケーションが重要だと実感した。
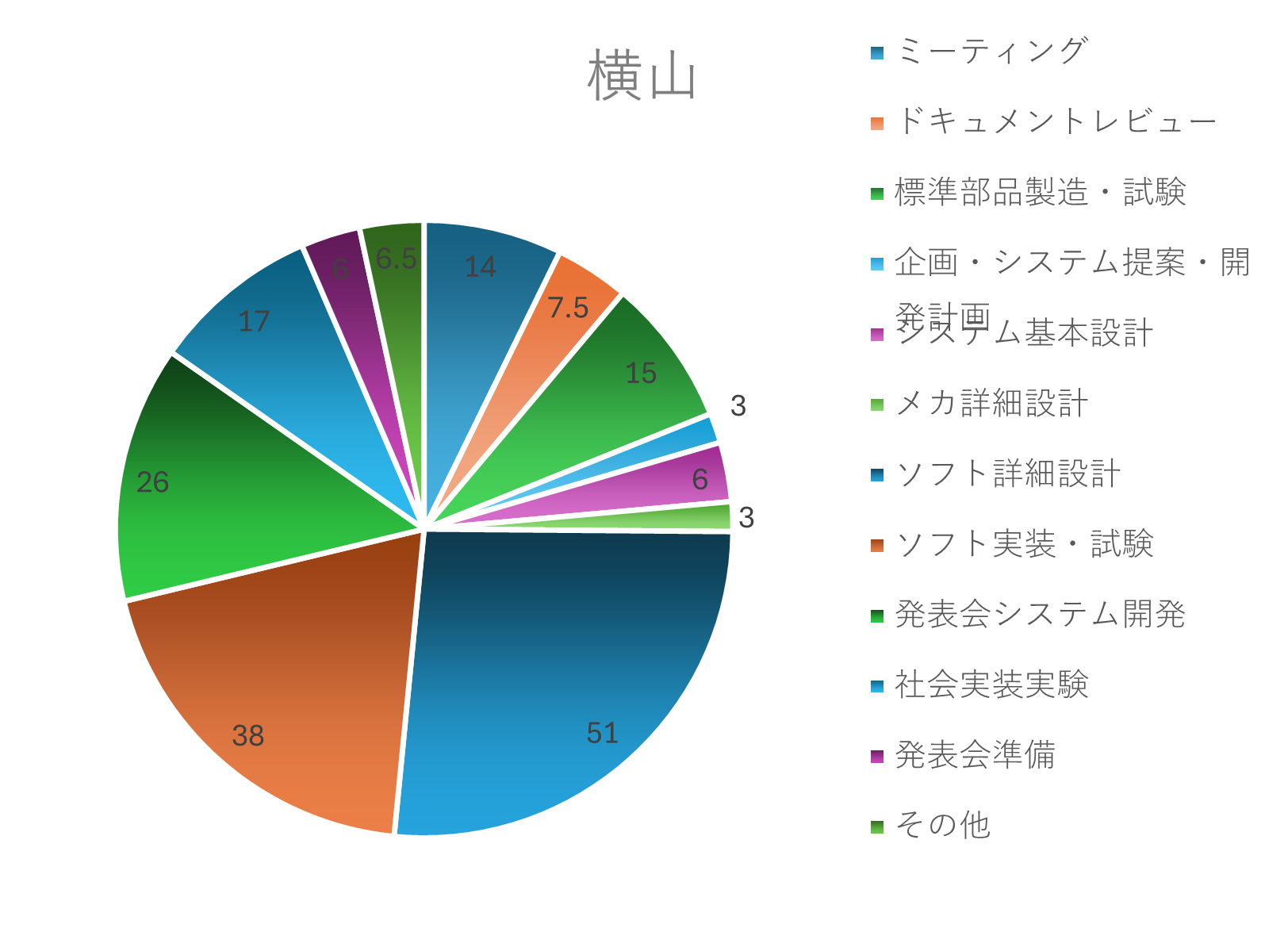
横山 由宇:ソフト
MIRS開発ではソフト部門で主にカメラ画角制御、人検知、管理アプリの開発を担当した。
開発ではカメラ映像や検知状態の通信に時間がかかってしまい、システム統合が予定よりもかなり遅れてしまった。
最終的には人検知、画角制御の精度を高めることができなかったため、実装の為にはさらなる改善が必要となると考えられる。
開発を通して、進捗の記録、確認の重要性やチームでの開発のやり方を学ぶことができた。
また興味のある通信分野に関しての開発をすることができ、良い経験を積むことができたため卒研や進学などに活かしていきたい。