3.1 Arduino製作手順
-
MIRSMG4D-SYST-0003 Arduino のセットアップとデバイス接続に従い,ユニバーサル基板実装を行った.
使用したピンをTable.2に示す.
完成した基板の部品面をFig.1,はんだ面をFig.2に示す.
Table.2 使用ピン一覧 ピン番号 接続デバイス IN/OUT 備考 2 左エンコーダ(A層) IN プルアップ,割り込み(CHANGE) 3 右エンコーダ(A層) IN プルアップ,割り込み(CHANGE) 4 左エンコーダ(B層) IN プルアップ 7 右エンコーダ(B層) IN プルアップ 8 左モータ(DIR) OUT 9 右モータ(PWM) OUT PWM 11 左モータ(PWM) OUT PWM 12 左モータ(DIR) OUT A5(19) バッテリー電圧 IN 抵抗分圧により1/2倍値を入力
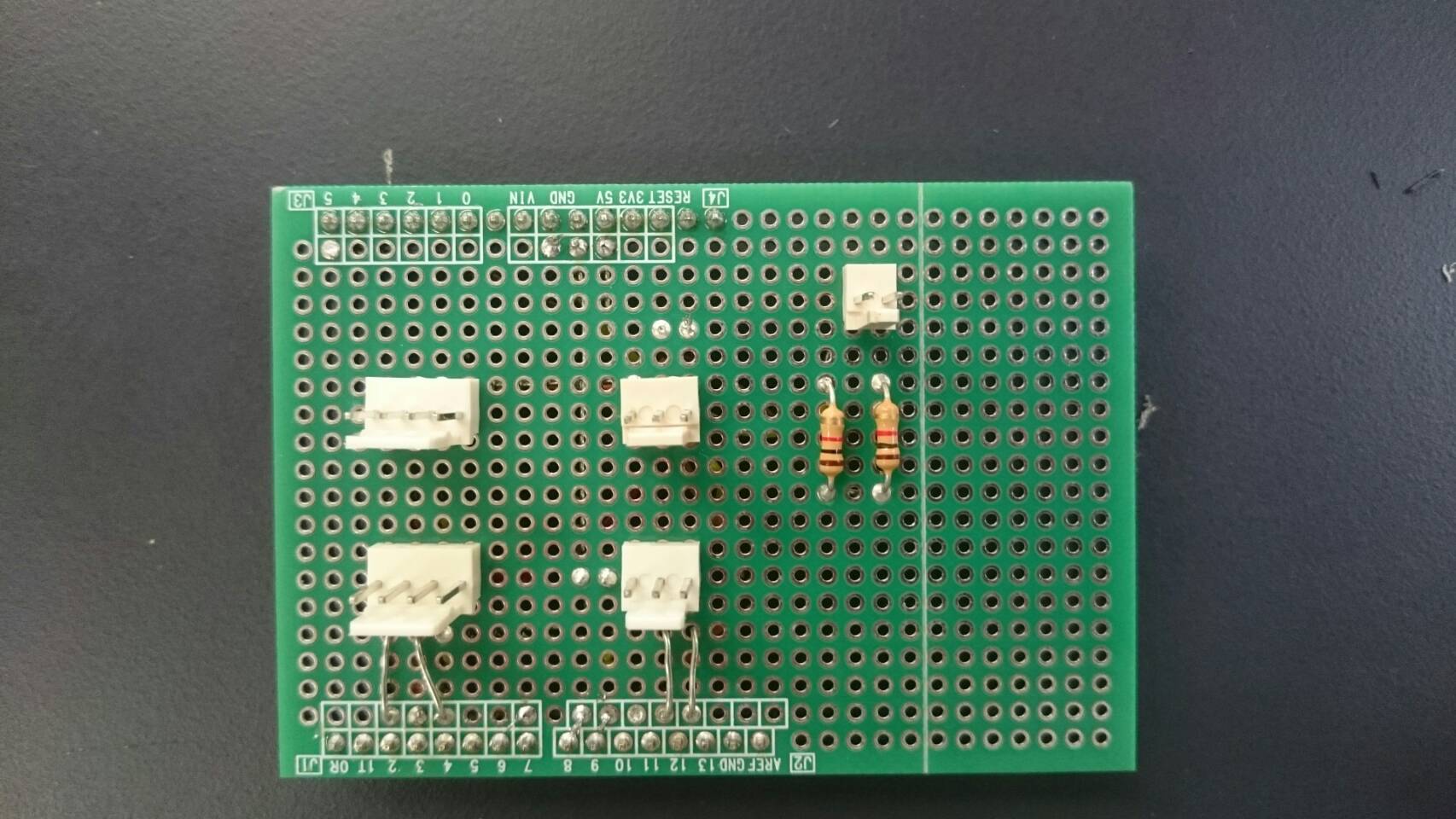
Fig.1 Arduino UNO用ユニバーサル基板(部品面)
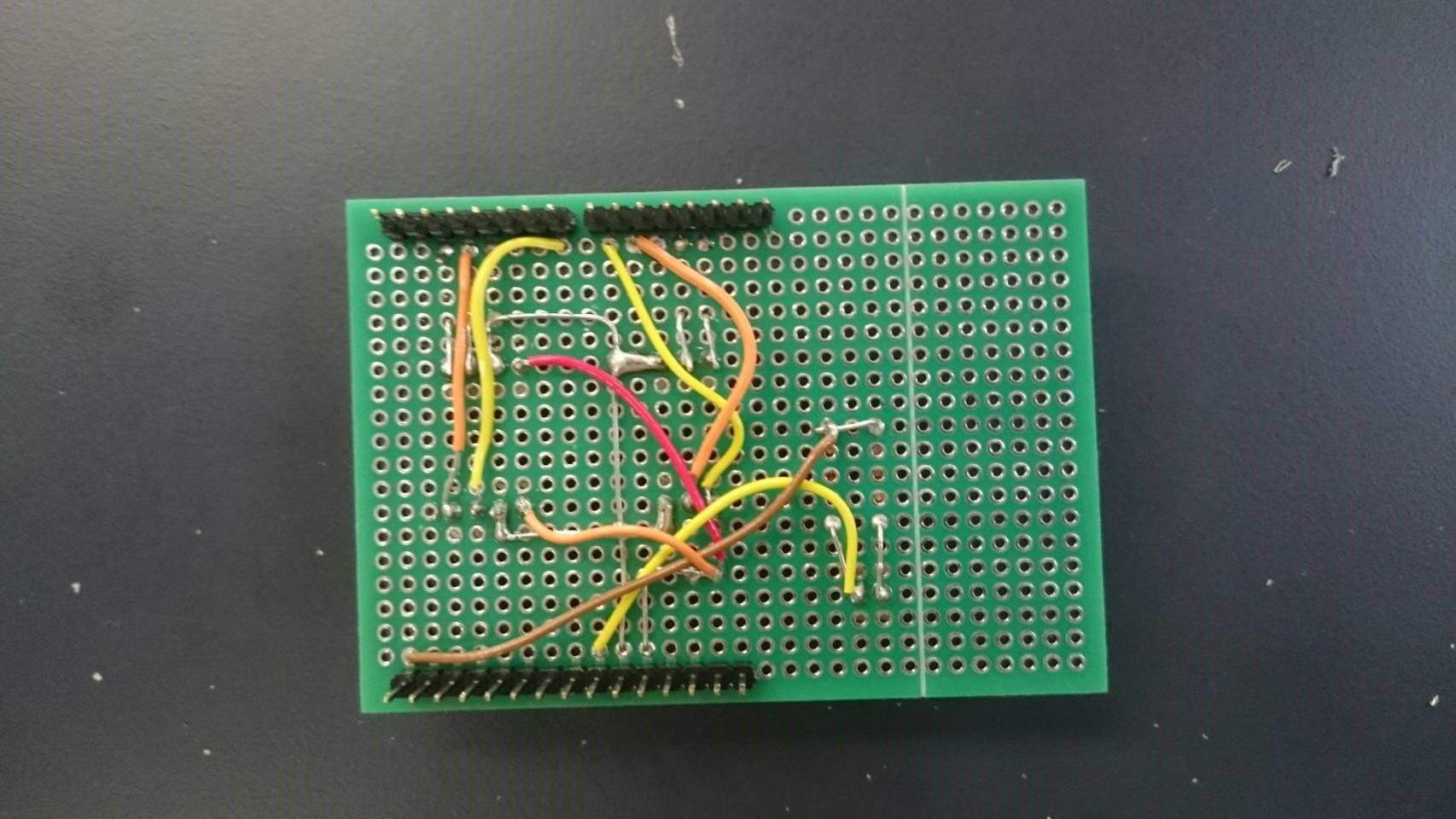
Fig.2 Arduino UNO用ユニバーサル基板(はんだ面)
-
MIRSMG4D-SYT-0004 Raspberry Pi のセットアップとデバイス接続に従い,ユニバーサル基板に20ピン×2列のピンソケット,信号線,ハウジング,ICソケットの基板実装を行った.
工夫点として,コネクタのGNDにつながる部分は黒く印を付け誰が見てもわかるようにした.
また,完成した基板の部品面をFig.3に,はんだ面をFig.4に示す.
3.2 Raspberry Piの製作手順
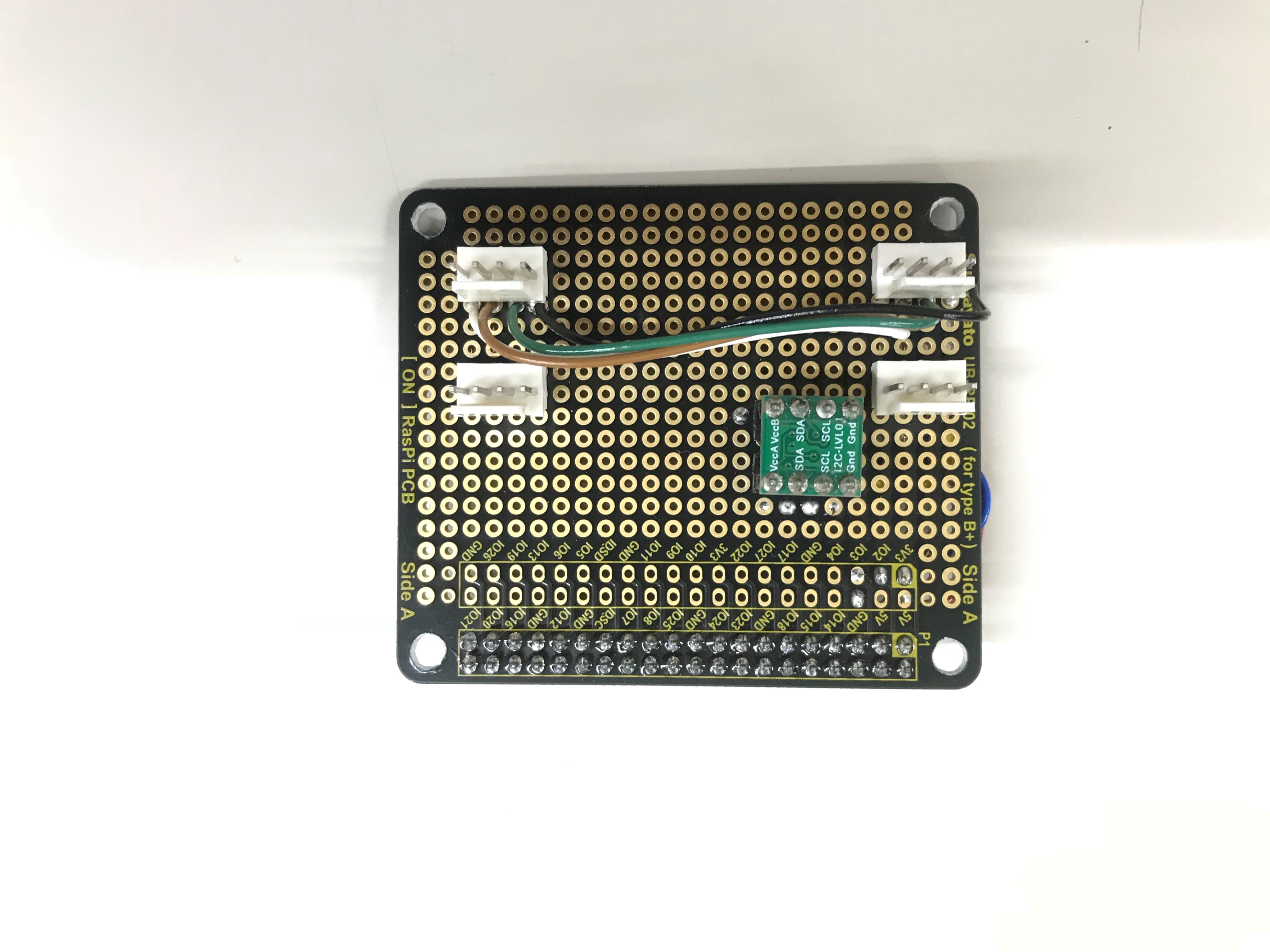
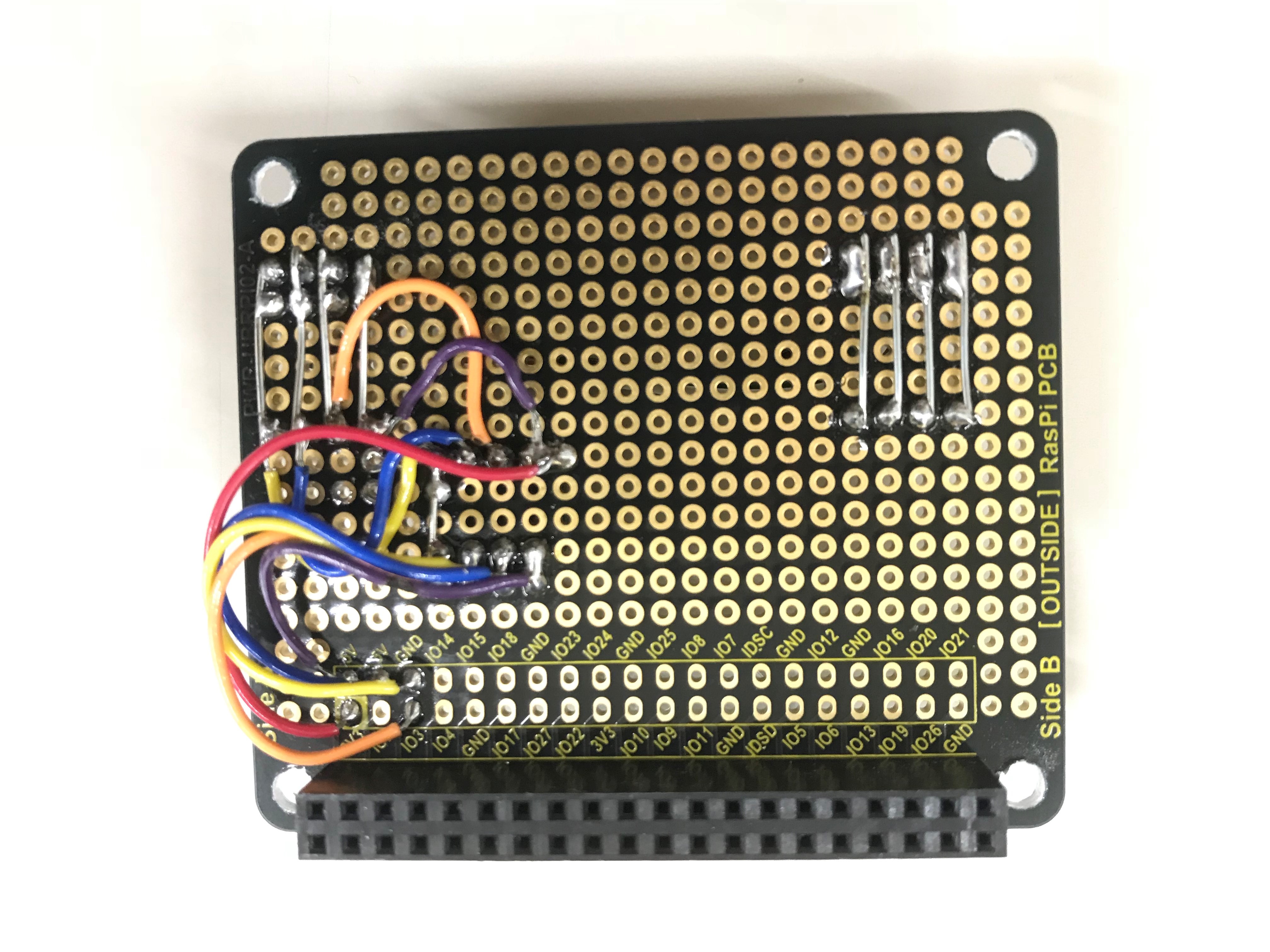
Fig.4 Raspberry Pi用ユニバーサル基板(はんだ面)
3.3 駆動系電源ボードの製作
①駆動系スイッチボード回路図を元に,ユニバーサル基板上に実装した.ユニバーサル基板上に実装した回路図をFig.5に示す.
N.O.のLED付きのスイッチを用いた.(N.O. = Nomaly Open)
基板配線に,抵抗の足の切りくず, 錫メッキ線を用いた.
バッテリーおよびMCB接続の端子は,Fig6のようにターミナルブロック2ピン(縦・小)を用いた.入力側(バッテリ)を緑,出力側(MCB)を青とした.
電圧監視用ポートには Molex 2ピンのハウジングを用いた.
完成した駆動系電源ボードの部品面をFig.6,はんだ面をFig.7に示す.
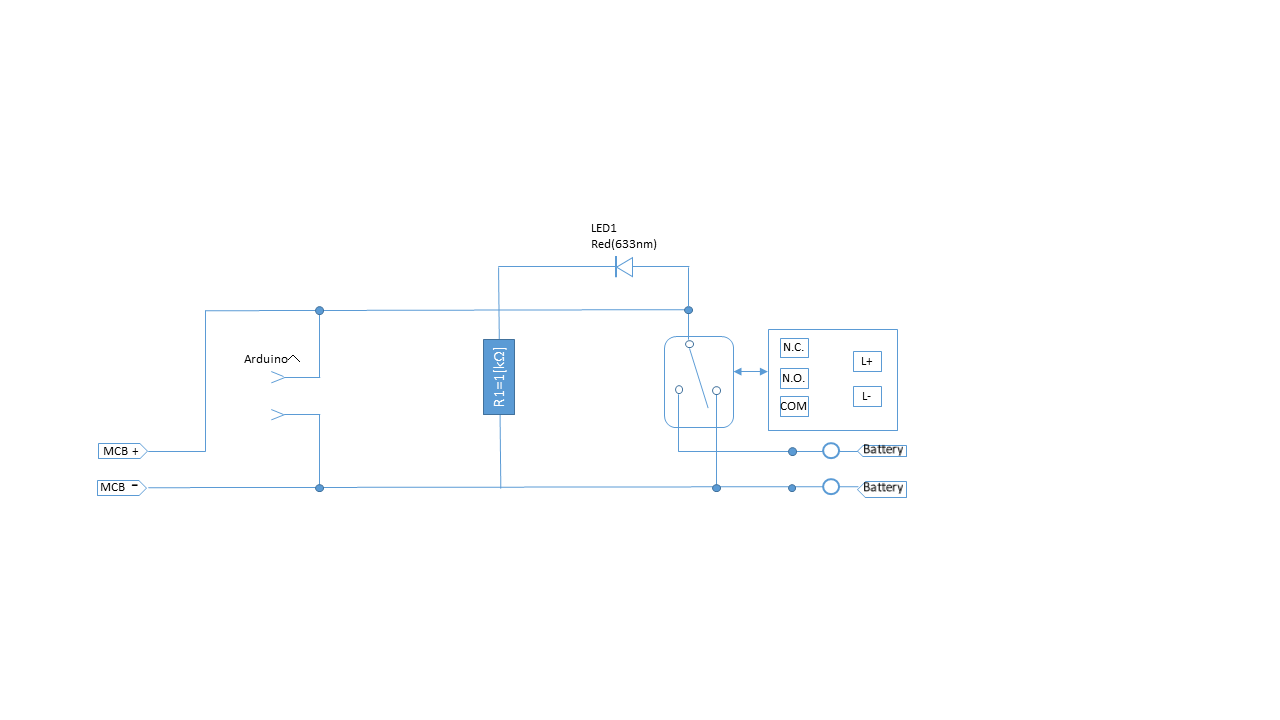
Fig.5 回路図
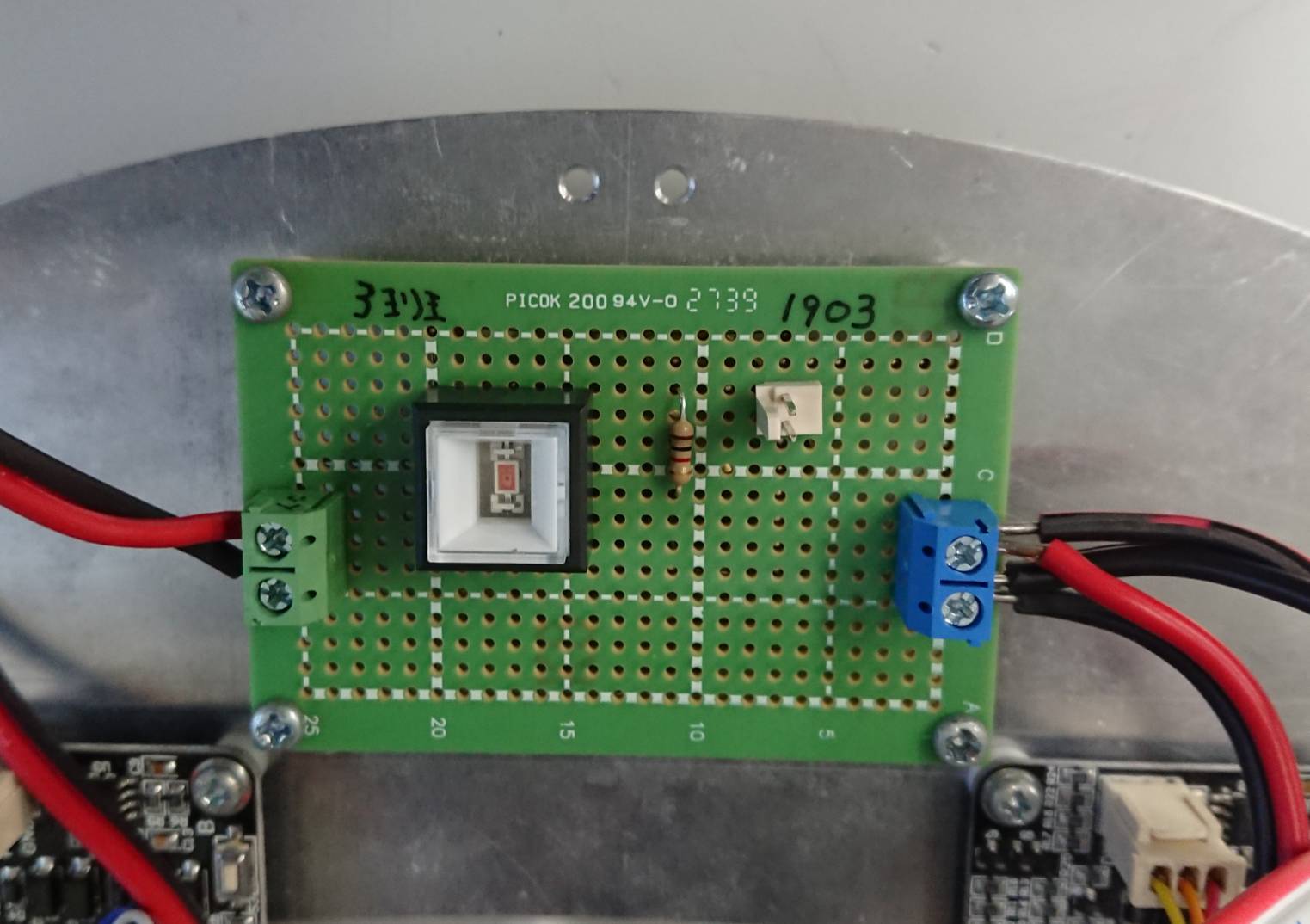
Fig.6 駆動系電源(部品面)
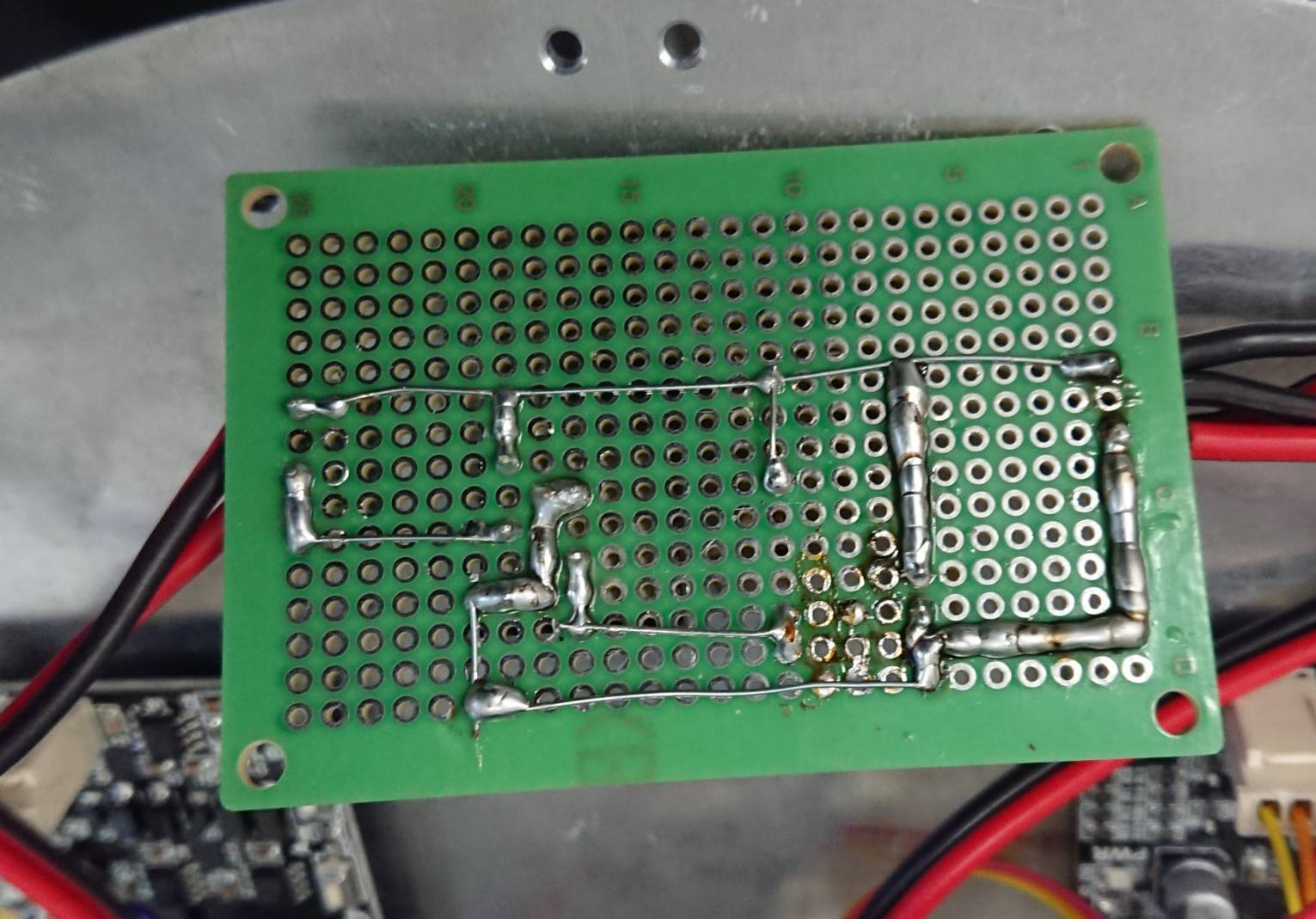
Fig.7 電源ボード(はんだ面)
テスターを用いて,はんだ付けを行ったすべての回路系に対して,導通チェックを行い,接続すべき箇所が接続していること,短絡してはいけない箇所が短絡していないことを確認した.
3.4 モータマウント・モータマウントサポート製作手順
モータマウントのねじ止めにひびが入っていたため新しく作製した.モータマウントを作り直すため,モータマウントサポートも作り直すことにした.
モータマウントとモータマウントサポートの製品についてはMIRSMG4D-MECH-0001 MIRSMG4D標準機メカニクス詳細設計書の中のstlファイルを3Dプリンタに送り作製した.
モータマウントについて作製した製品の写真がないので作製したことをこの文章に示す.
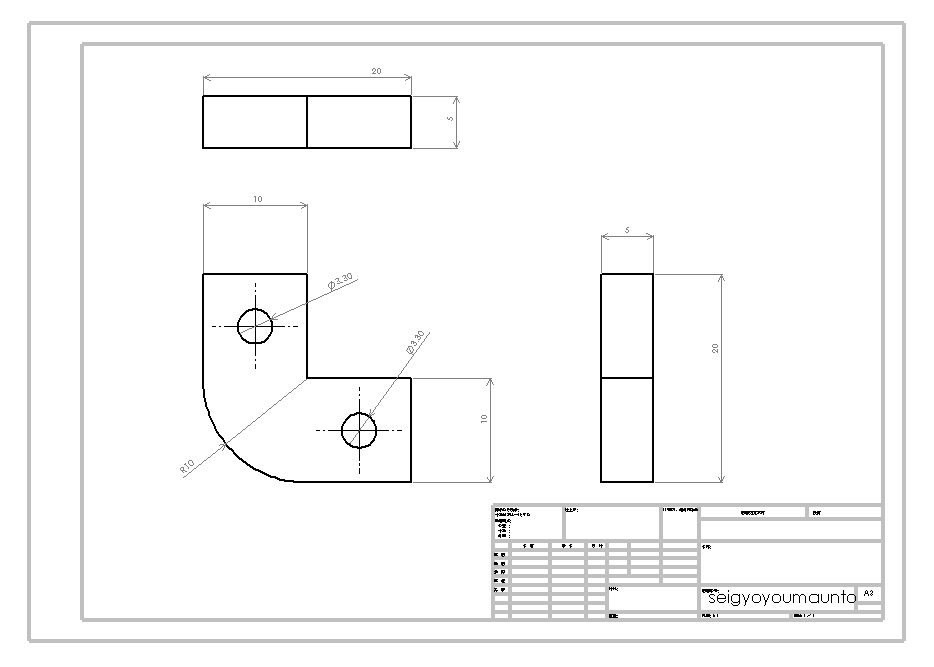
作製したモータマウントの図面をFig.8,モータマウントサポートの図面をFig.9に示す.
モータマウントサポートについて作製した製品の写真は製品の表面をFig.10,製品の裏側をFig.11に示す.

Fig.10 モーターマウントサポートの表面

Fig.11 モーターマウントサポートの裏面
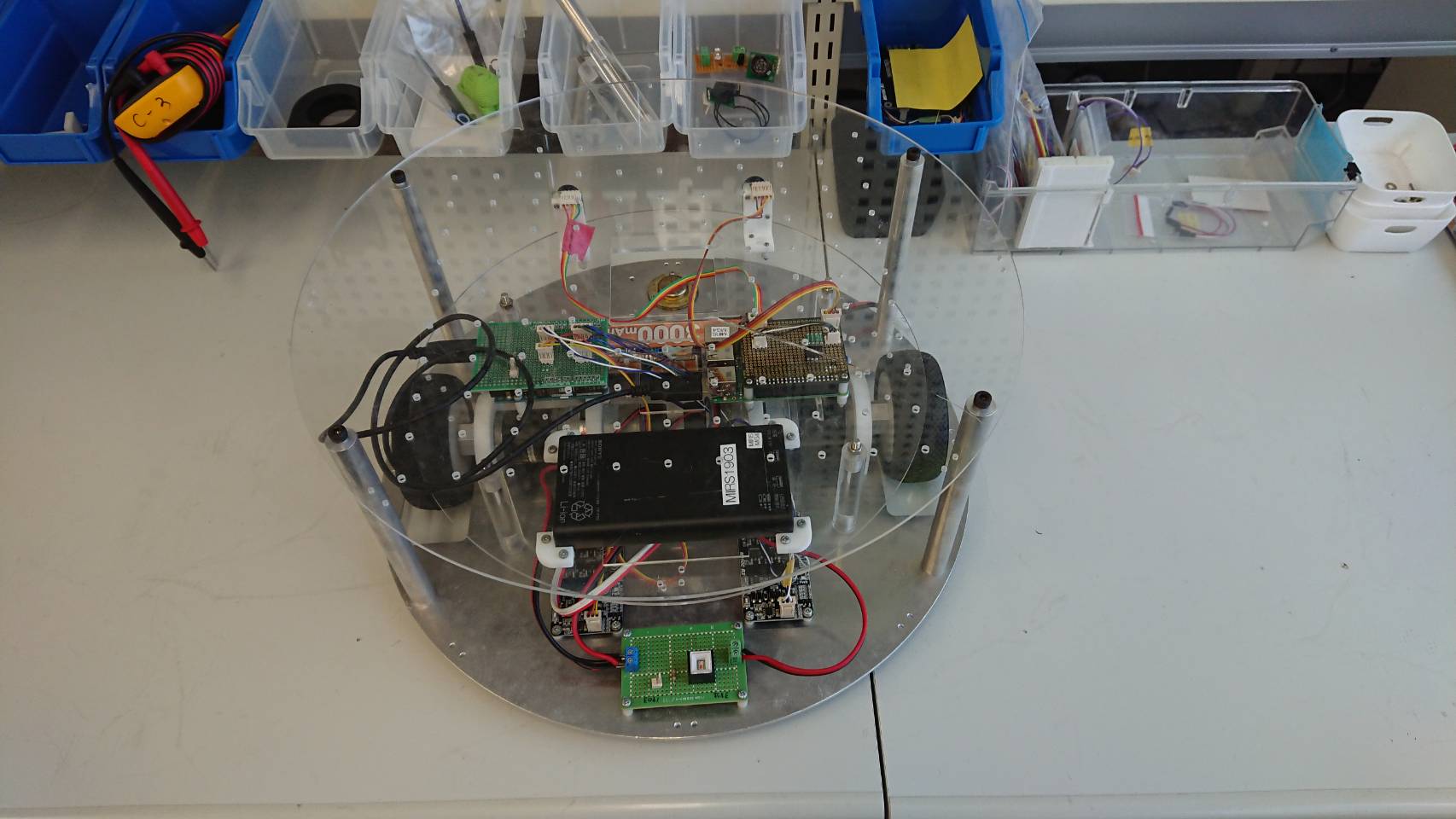
また,製品の実装図をFig.12に示す.

Fig.12 製品実装図