はじめに
本ドキュメントはMIRS1804 GYM員Projectの基本設計書のソフトウェアについてのドキュメントである。担当メンバー
MIRS1804のソフトウェア担当メンバーを以下に示す。中村美月、米持春貴
機能設計
MIRSに搭載する機能についてまとめた表をTable.1として以下に示す。| 機能 | 内容 |
|---|---|
| 白線引き機能 | 指定された位置、ルートで白線が引ける。 |
| マーカー設置機能 | 指定された位置でマーカーを設置できる。 |
| ディスプレイ表示機能 | MIRSの経路を表示できる。スイッチで経路パターンの切り替え、決定ができる。 |
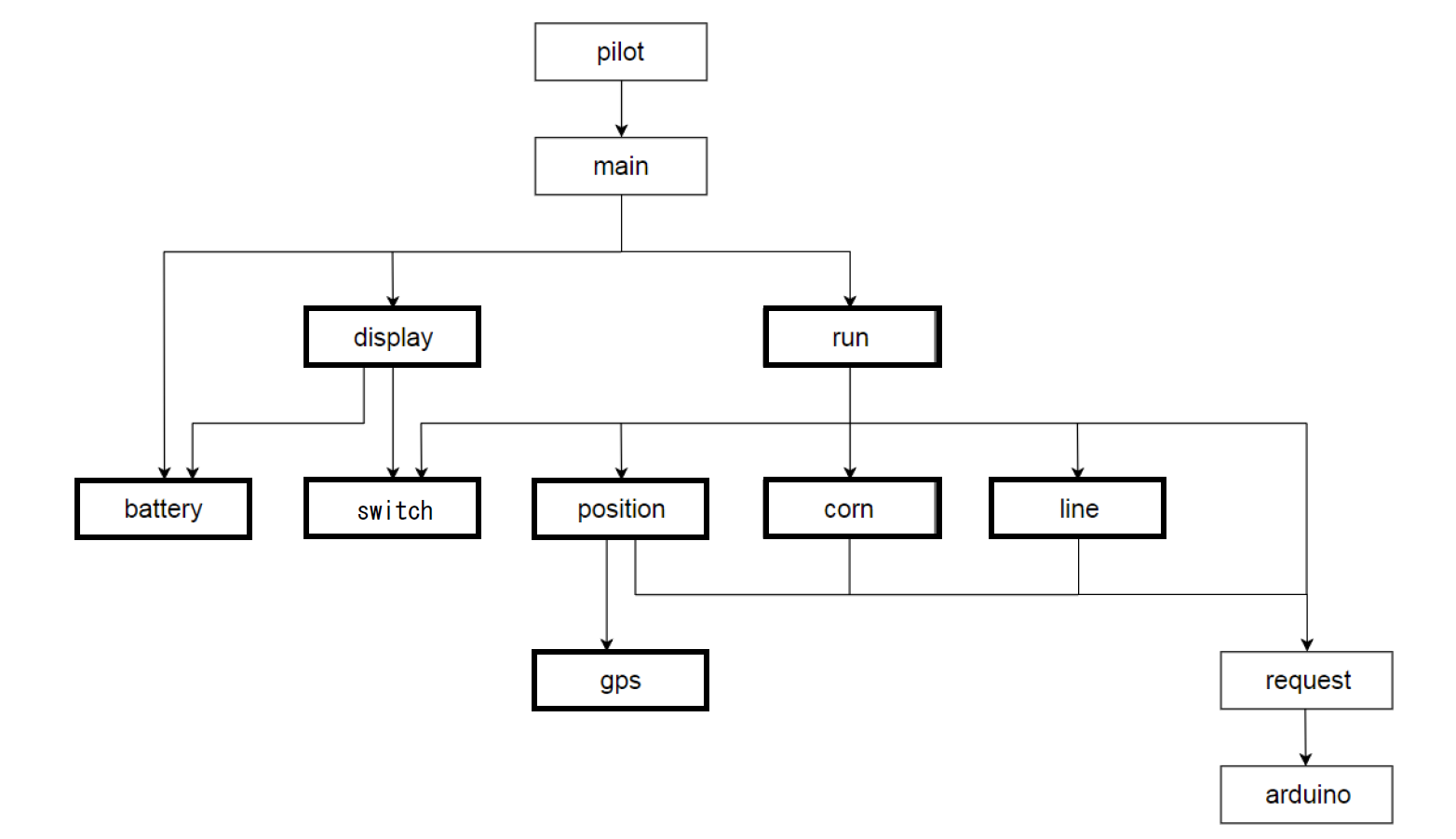
構造設計
モジュールの構成内容を表した表をTable.2 、Table.3として以下に示す。| モジュール名 | 概要 |
|---|---|
| *run | 走行の処理 |
| *display | ディスプレイの処理 |
| *corn | コーン落下機構の処理 |
| *line | 白線引き機構の処理 |
| *switch | スイッチの読み取り |
| arduino | Arduinoとの通信の処理 |
| *position | 自己座標の処理 |
| *gps | 位置情報の管理 |
| request | Arduinoへ命令を送る |
| *battery | バッテリー管理 |
| モジュール名 | 概要 |
|---|---|
| motor | モータのPWM制御 |
| encoder | ロータリーエンコーダ値のカウント |
| distance | エンコーダ値を走行距離に換算 |
| vel_ctrl | モータの速度のPI制御 |
| run_ctrl | 機体の直進、回転のP制御 |
| io | ioピンのデータの取得 |
| raspi | RaspberryPiとの通信 |
| slave | RaspberryPiからの命令で動作 |
太い四角で囲まれたモジュールが新規作成するものである。

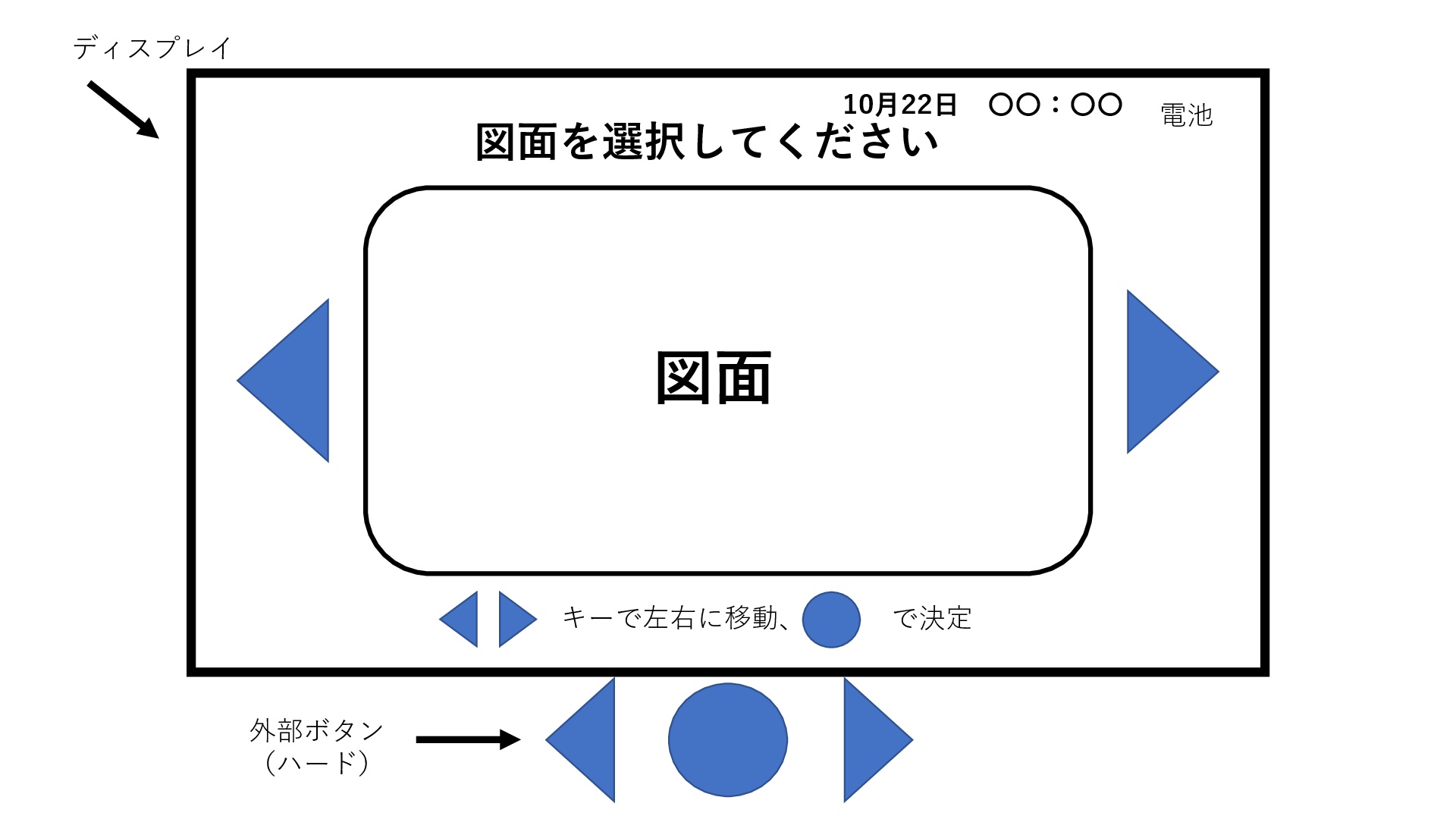
表示部、操作部仕様
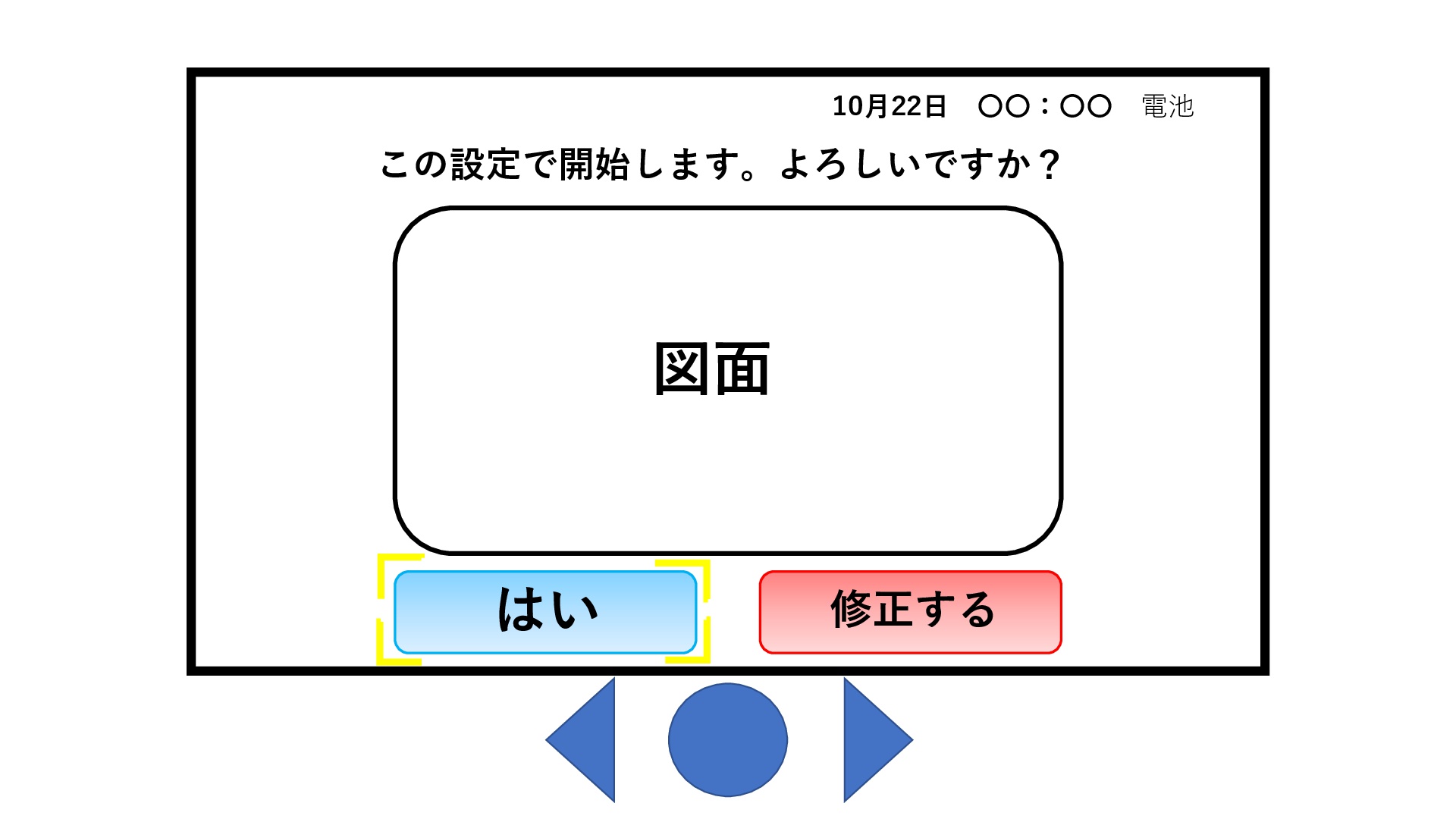
ディスプレイに表示するアプリケーションを操作するスイッチの押下時の動作についてまとめた表をTable.4として以下に示す。| スイッチ種類 | 図面選択時 | 図面決定時 |
|---|---|---|
| 左三角スイッチ | 1つ左の図面に移動 | はいの時:カーソルを修正するに移動 修正するの時:カーソルをはいに移動 |
| 丸スイッチ | 押下時の図面で実行するか どうかの図面決定に移行 |
はいの時:図面を書き始める 修正するの時:図面選択に戻る |
| 右三角スイッチ | 1つ右の図面に移動 | はいの時:カーソルを修正するに移動 修正するの時:カーソルをはいに移動 |