はじめに
本ドキュメントはMIRS1804 GYM員Projectの基本設計書のエレクトロニクスについてのドキュメントである。担当メンバー
MIRS1804のエレクトロニクス担当メンバーを以下に示す。
足立颯一郎、川口大和、土屋優貴
システム構成
MIRS1804のシステム構成を表した図をFig.1として以下に示す。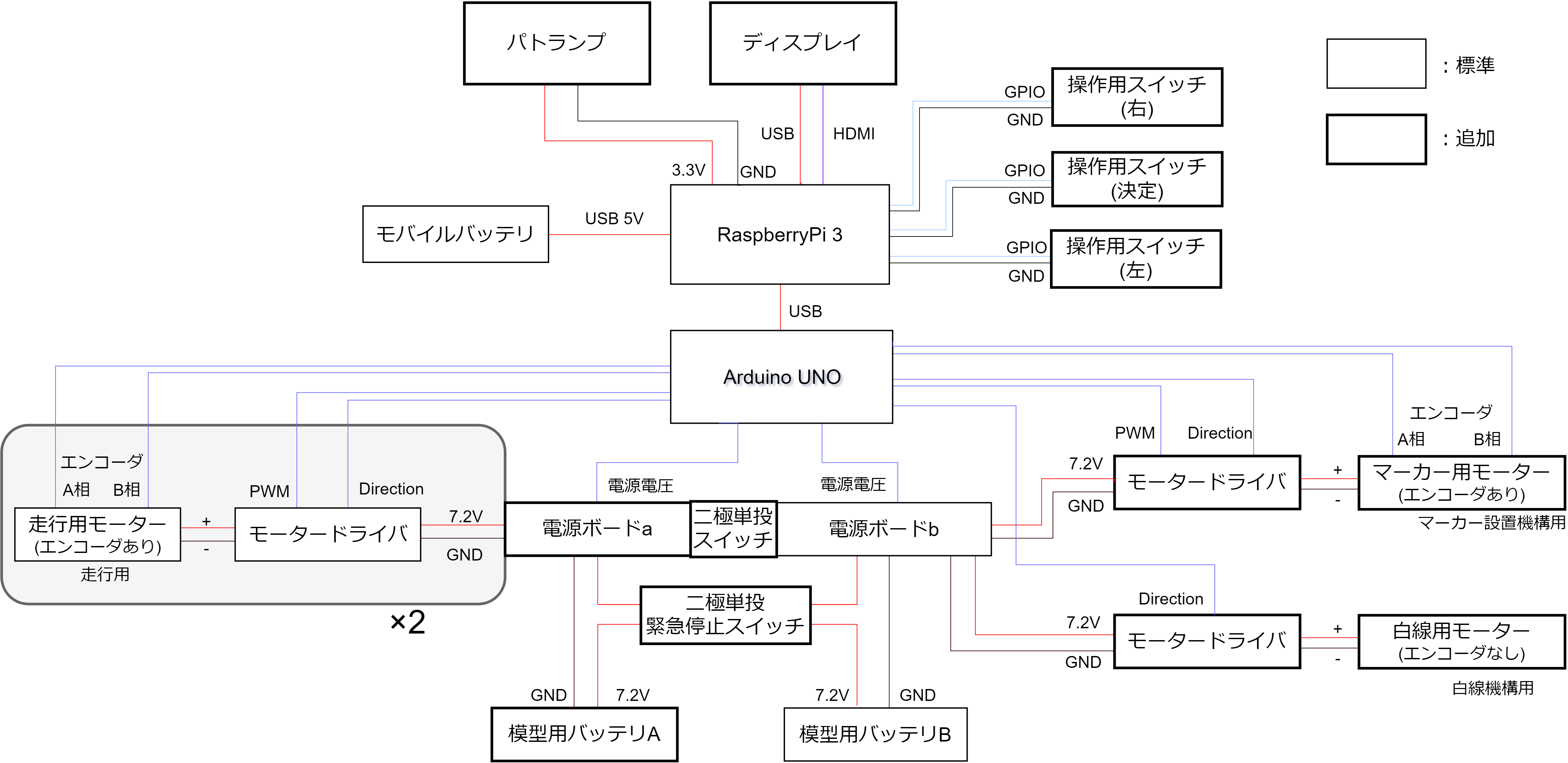
図中にあるように、動作中の衝突防止策としてパトランプを用いる。その仕様をまとめた表をTable.1として以下に示す。
| 型番 | CLV-502 |
| 個数 | 1 |
| 定格電圧 | 4.5[V] |
| 定格電流 | 0.55[A] |
| 電源 | パトランプ内の電池ケース(単3電池3本:4.5[V])から供給 |
| その他 | ON/OFFの切り替えはFETを用いてRaspberryPiから行う。 |
パトランプのON/OFFに用いるFETの仕様についてまとめた表をTable.2として以下に示す。
| 型番 | 2SK971 |
| 個数 | 1 |
| 動作電圧 | 3[V](ドレイン電流=5[A]の時) |
| 最大電圧 | 60[V] |
| 最大電流 | 15[A](瞬間:60[A]) |
電源仕様
電源の仕様をまとめた表をTable.3として以下に示す。| 種類 | 個数 | 電圧[V] | 利用箇所と供給方法 |
|---|---|---|---|
| モバイルバッテリー | 1 | 5.0 |
RaspberryPiへUSBケーブルで供給 その他の5Vを用いるものはRaspberryPiから供給 |
| 模型用バッテリー | 2 | 7.2 |
A:モータードライバへ電源ボードaを介して供給 B:モータードライバへ電源ボードbを介して供給 |
Fig.1中の2つの電源ボードのON/OFFの切り替えを1つのスイッチで行うために二極単投スイッチを用いる。その仕様をまとめた表をTable.4として以下に示す。
| 型番 | S-21A |
| 個数 | 1 |
| 接点の構成 | NO接点 |
| 電流容量 |
(抵抗負荷) 15[A] AC125[V] , 15[A] AC250[V] , 15[A] DC30[V] (誘導負荷) 8[A] AC125[V] |
表示部、操作部仕様
表示部、操作部をまとめた表をTable.5,Table.6,Table.7,Table.8として以下に示す。| 種類 | 個数 | 目的 |
|---|---|---|
| ディスプレイ | 1 | ユーザーへのアプリケーションの表示 |
| スイッチ | 3 | ディスプレイに表示するアプリケーションの操作(「左」「決定」「右」を1つずつ) |
| 緊急停止スイッチ | 1 | 緊急時に機体を物理的方法で強制停止する |
| 大きさ |
縦:14.22[cm] 横:10.67[cm] |
| 解像度 | 800×400 |
| 動作電圧 | 5[V] |
| 接続 | HDMI |
| その他 | コンデンサタッチ制御 |
| 型番 | DS-193-K |
| 取付穴径 | 10[mm] |
| 機能動作 | OFF - < ON > (< >はモーメンタリ) |
| 種類 | 非照光押しボタンスイッチ |
| 容量電流 | 1[A] AC125[V] |
| 型番 | MVN301NR |
| 接点の構成 | NC接点 |
| 取付穴径 | 30[mm] |
| 動作特性 | プッシュロックターンリセット |
駆動部仕様
駆動部の仕様をまとめた表をTable.9,Table.10として以下に示す。| モーター名 | 個数 | 型番 | ギア比 | 定格電圧[V] | 最大電流[A] | エンコーダ |
|---|---|---|---|---|---|---|
| 走行用モーター | 2 | KS5N-IG36P-019 | 19:1 | 12 | 9 | あり |
| 白線用モーター | 1 | ??? | (ギアなし) | ??? | ??? | なし |
| マーカー用モーター | 1 | FIT0522 | 34:1 | 6 | 3.2 | あり |
| 型番 | MD-10C |
| 個数 | 4 |
| 役割 |
走行用モーターの制御×2 白線用モーターの制御×1 マーカー用モーターの制御×1 |
| ロジック電圧 | 3.3~5[V] |
| モーター電源電圧 | 5~25[V] |
| モーター最大電流 |
連続13[A] ピーク30[A](10[s]) |
ピン割り当て
RaspberryPiとArduinoUNOのピン割り当てをまとめた表をTable.11,Table.12として以下に示す。| PIN番号 | NAME | 接続デバイス | I/O | 備考 |
|---|---|---|---|---|
| 23 | GPIO11 | パトランプ | OUT | |
| 25 | Ground | パトランプ | ||
| 30 | Ground | 操作用スイッチ(決定) | ||
| 32 | GPIO12 | 操作用スイッチ(決定) | IN | プルアップ |
| 34 | Ground | 操作用スイッチ(左) | ||
| 36 | GPIO16 | 操作用スイッチ(左) | IN | プルアップ |
| 37 | GPIO26 | 操作用スイッチ(右) | IN | プルアップ |
| 39 | Ground | 操作用スイッチ(右) |
| PIN | 接続デバイス | 内容 | I/O | 備考 | |
|---|---|---|---|---|---|
| Digital | D0 | RX | |||
| D1 | TX | ||||
| D2 | 走行用モーター(L) | エンコーダA相 | IN | プルアップ、割り込み(CHANGE) | |
| D3 | 走行用モーター(R) | エンコーダA相 | IN | プルアップ、割り込み(CHANGE) | |
| D4 | 走行用モーター(L) | エンコーダB相 | IN | プルアップ | |
| D5 | 走行用モーター(R) | エンコーダB相 | IN | プルアップ | |
| D6 | 白線用モーター | PWM | OUT | ||
| D7 | 白線用モーター | Direction | OUT | ||
| D8 | 走行用モーター(R) | Direction | OUT | ||
| D9 | 走行用モーター(R) | PWM | OUT | ||
| D10 | マーカー用モーター | PWM | OUT | ||
| D11 | 走行用モーター(L) | PWM | OUT | ||
| D12 | 走行用モーター(L) | Direction | OUT | ||
| D13 | |||||
| Analog | A0 (D14) | マーカー用モーター | エンコーダA相 | IN |
Digital14とする プルアップ、割り込み(CHANGE) |
| A1 (D15) | マーカー用モーター | エンコーダB相 | IN |
Digital15とする プルアップ |
|
| A2 (D16) | マーカー用モーター | Direction | OUT | Digital16とする | |
| A3 | |||||
| A4 | 模型用バッテリA | 電圧計測 | IN | 抵抗分圧により1/2倍値を入力 | |
| A5 | 模型用バッテリB | 電圧計測 | IN | 抵抗分圧により1/2倍値を入力 | |
| 5[V] |
エンコーダ(走行用モーター(R)) エンコーダ(走行用モーター(L)) エンコーダ(白線用モーター) |
||||
| GND |
モーター(走行用モーター(R)) エンコーダ(走行用モーター(R)) モーター(走行用モーター(L)) エンコーダ(走行用モーター(L)) モーター(マーカー用モーター) エンコーダ(マーカー用モーター) モーター(白線用モーター) 模型用バッテリーA 模型用バッテリーB |
計9本 3つのGNDピンに配分 |
各パートのリンク
各パートのドキュメントのリンクを以下に示す。・基本設計書(全体)
・基本設計書(ソフトウェア)
・基本設計書(メカニクス)