|
沼津高専 電子制御工学科 |
||||||||
|
||||||||
|
改正記録 |
||||||||
|
版数 |
作成日 |
作成者 |
承認 |
改正内容 |
||||
|
A01 |
2004.7.19 |
鈴木・古橋 |
大竹 |
初版 |
||||
|
A02 |
2004.7.22 |
鈴木 |
大竹 |
外観の図訂正 |
||||
|
B01 |
2004.7.24 |
鈴木 |
大竹 |
2と3と4を改正 |
||||
|
B02 |
2004.9.3 |
鈴木 |
大竹 |
3と4を改正 |
||||
|
B03 |
2004.9.7 |
鈴木・遠山 |
大竹 |
2の動作概要と4を改正 |
||||
1. はじめに
本ドキュメントは、MIRS-0405の基本設計内容を示すものである。
2. システム概要
1.
動作概要
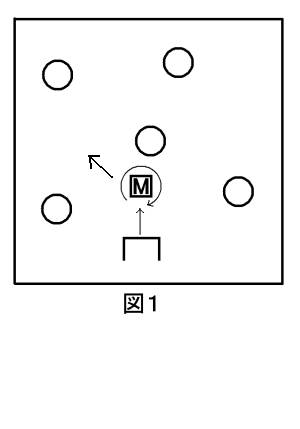
競技1回目
① フィールドの中心で回転しポストを探す。中心へ向かう途中にポストがあったら迂回して中心へ向かう。また、フィールドの中心にポストがあったら一定距離手前で回転しポストを探す。
② すべてのポストを探す事が出来なかったら違う位置で回転し全てのポストを探す。
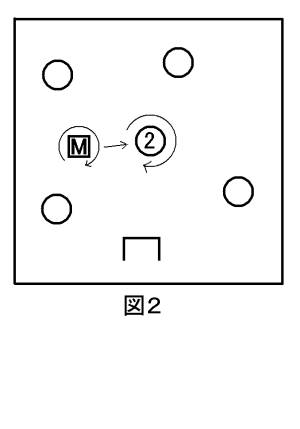
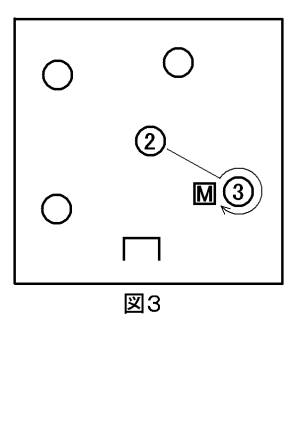
③ 一番近くのポストからフィールドを一周するように回り、順にポストのNo.を把握していく。その時、順番通りのポストがあったら獲得する。
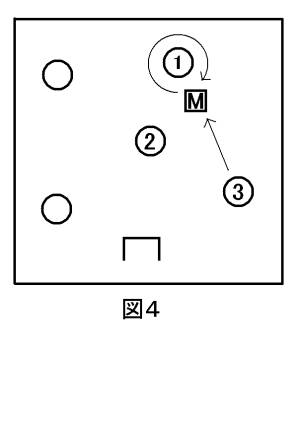
④ すべてのポストのNo.を確認したら、まだ獲得してないポストを順番通りに獲得していく。その時最短距離で移動する。目的のポスト以外は迂回する。
⑤ もし白線センサが白線を感知したらどこかで動作がおかしくなったということで元の動作に復帰するのは難しいので、ランダムに進みポストを確認していく。
競技2回目
・ 1回目に把握したポストのNoの1から順に獲得する。
・ 最短距離で移動する。もちろん目的のポスト以外は迂回する。
・ もし1回目にすべてのポストが把握できなかった場合、1回目の続きから行うような形にできたらしたい。
※参照 → システム提案書
2.
ハードウェア
標準機通り。ただし使用しないセンサは取り外す。
参照 →MIRSSTND
3.
ソフトウェア
・
標準機のプログラムをベースに必要な機能を追加していく。
・
C言語でプログラムを作る。
・
ATL-MIRS 用に開発された標準ライブラリを使用する。
参照 →標準動作プログラム概要
4.
外観
図9.外観
3. 動作概要を実現するために必要とされる機能・性能
1.ハードウェア
標準機通り。
2. ソフトウェア
MIRS標準機用に用意されたカーネルモジュールとデバイスドライバが必要。
ATL-MIRS
用に開発された標準ライブラリが必要。
4.機能・性能の実現方法
1.ハードウェア
標準機通り。
2.ソフトウェア(構成やアルゴリズム)
動作概要を満たすプログラムを作る。
① 障害となるポストを避ける方法
MIRSが移動する時、前方の超音波センサでポストがあるか確認しながら進み、超音波センサが一定値以下を検出したら、前方の2つの超音波センサのうち検出した距離が長いほうへ迂回する。ポスト周回軌道で迂回し、半周したら元の移動動作へ戻る。
②
MIRSを5つのポストに対応させる方法
control.h のPOST_NUMの数値を5にする。
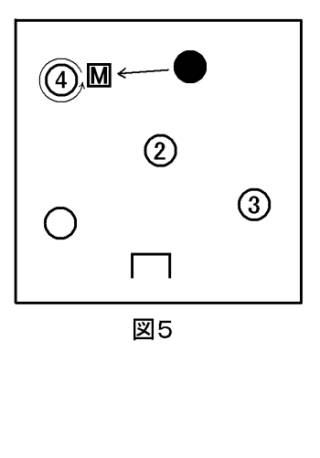
③ 中心付近にポストがある場合
最初の直進をしている時、超音波センサでポストがあるか確認しながら進み、超音波センサで進路にポストがあることがわかったらそのポストの50cm手前で停止する。その後ポストを探索する。
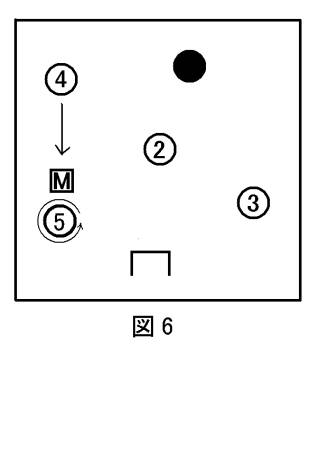
④ ポストを探索した時その位置からポストが2つ重なっていた場合
回転した時、超音波センサから検出された極小値の数が4以下であった場合、一番近い位置にあるポストから45°左に傾いた方向に一定距離進み、再び回転してポストを探索する。先に回転した時のデータと合わせてすべてのポストの位置を確認する。
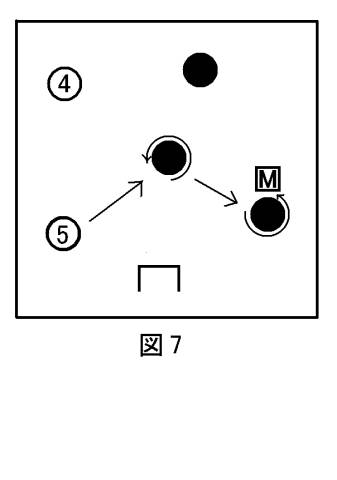
⑤
ポストを獲得していく方法
まず保存した距離データを比べて、一番近いポストへ向かう。ポスト接近・周回・獲得モードへ。ここまでは標準機通り。その後、まだ確認してないポストの距離データを比べて一番近いポストへ向かう。今いるポストと次に向かうポストの距離データでベクトル計算を行ってポストからポストへ直接移動する。これを4回繰り返す。確認したポストはNo.と獲得したかを区別してデータとして残す。
5つのポストを回ったら、次に獲得するNo.のポストへ同じように直接移動し獲得する。これをすべてのポストを獲得するまで繰り返す。
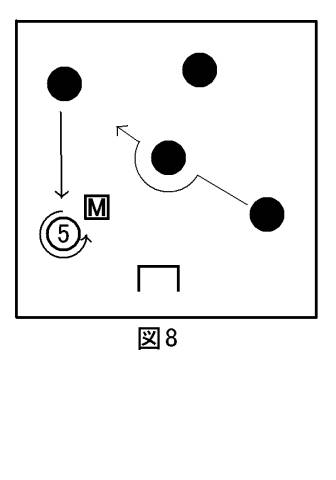
⑥
白線センサを感知した場合
まず180°回転した後直進し、ポストがあったら周回・獲得モードへ。その後はランダムの方向へ進みポストがあったら周回・獲得モードへ、白線を感知したら180°回転しランダムの方向へ。これを繰り返す。
|
関連文書 |