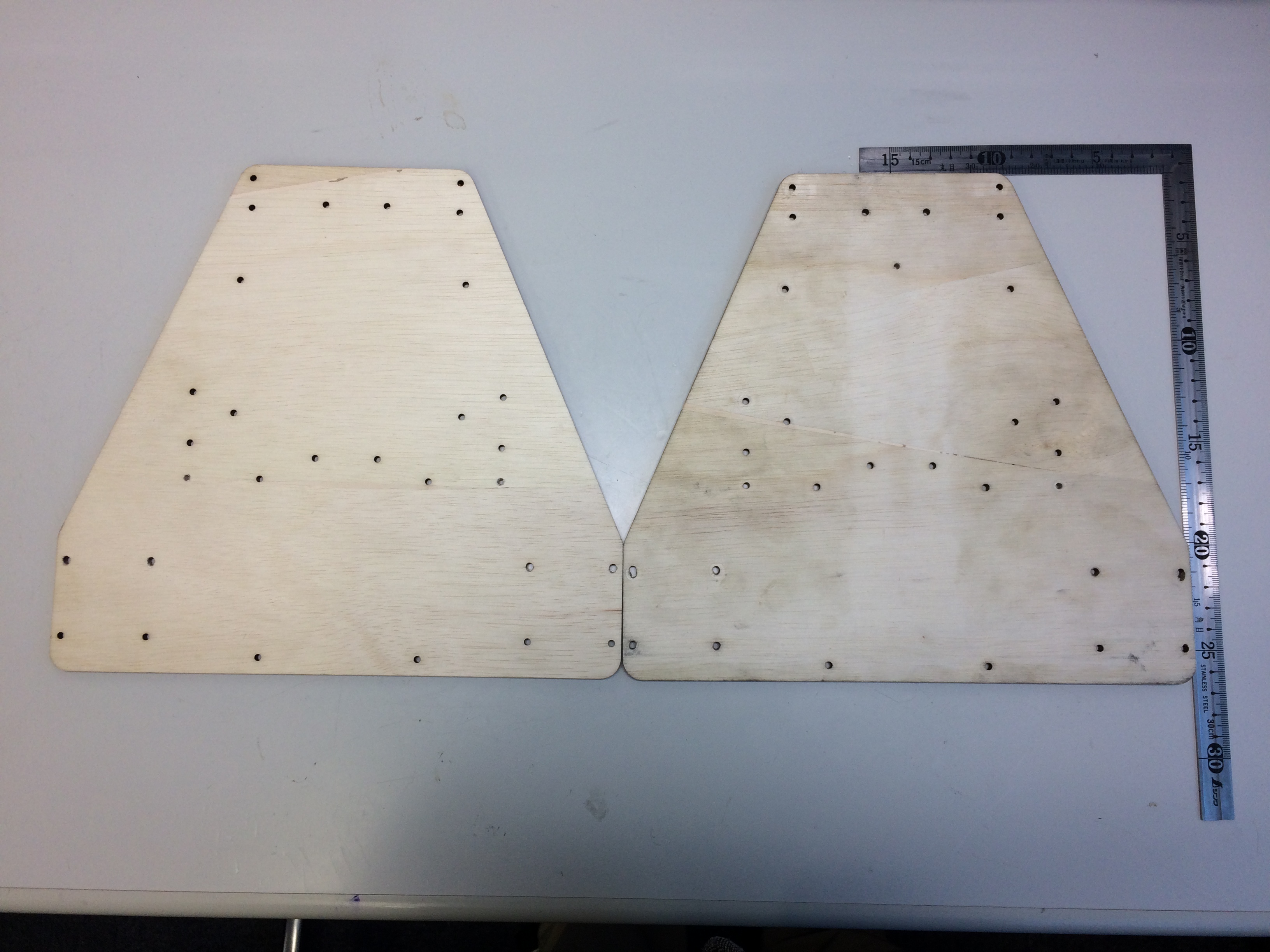
2.1シャーシ
教育研究支援センターのレーザー加工機を利用して製作した。センサマウンタの再製作に伴い新たに穴を追加した。シャーシは小型化のため標準機から形状を変更し、軽量化・剛性確保のために材料には厚さ5.5mmのベニヤ板を使用した。
予備も含めて2枚用意した。また大きさは縦270mm、横250mmとなっている。
シャーシの詳細な形状や各部形状の役割については MIRS1603 シャーシ詳細設計書 を参照。
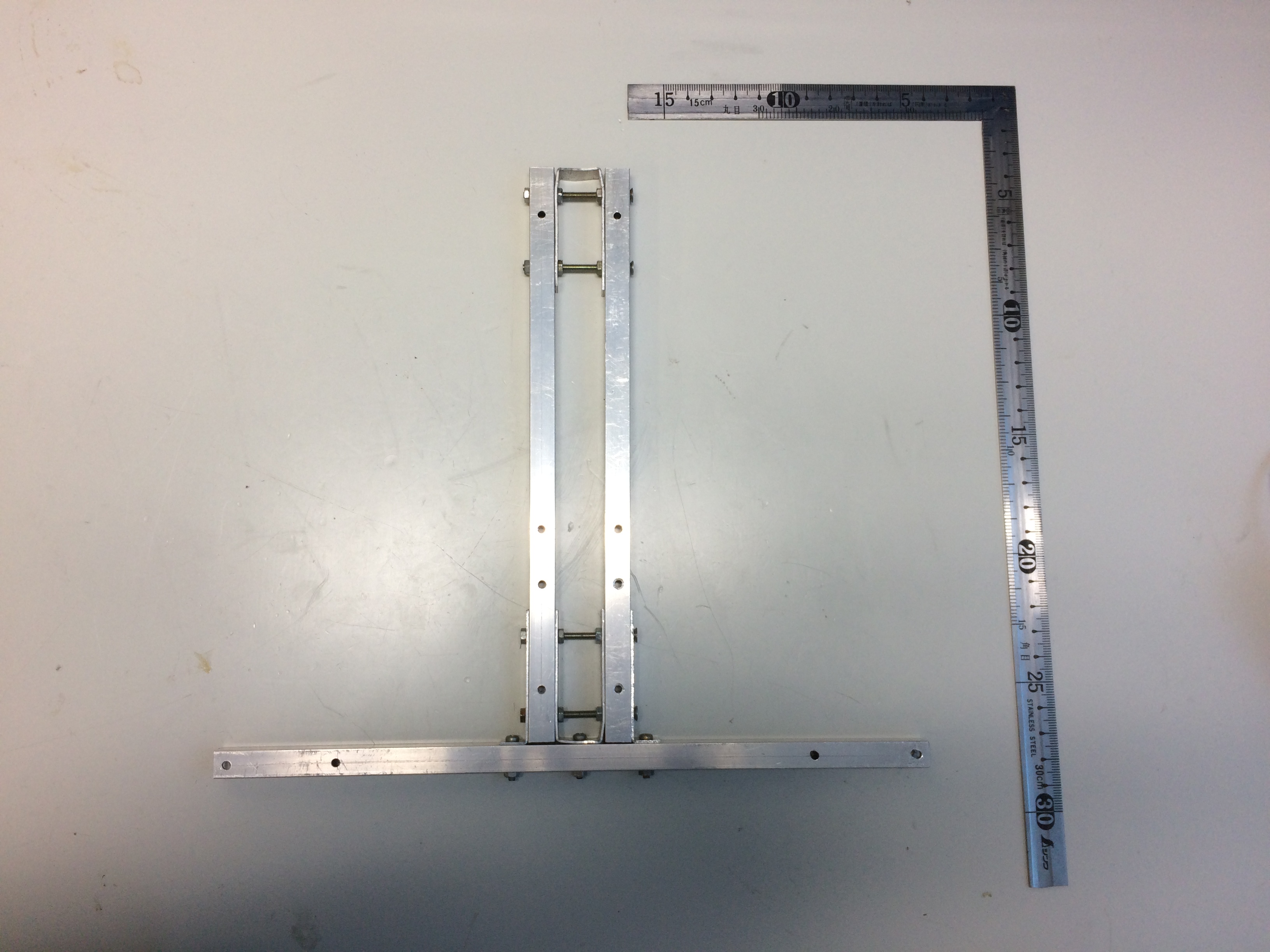
2.2フレーム
メカニクス詳細設計書に示した図面にしたがい加工を行った。また大きさは縦270mm、横250mmとなっている。フレームは機体のさらなる剛性確保、シャーシの割れ防止などのため、アルミ角材[1 × 1mm]をベースにアルミ板[t:1mm}bを曲げた部品で組立てられた。
構成部品の詳細はMIRS1603 フレーム詳細設計書を参照。
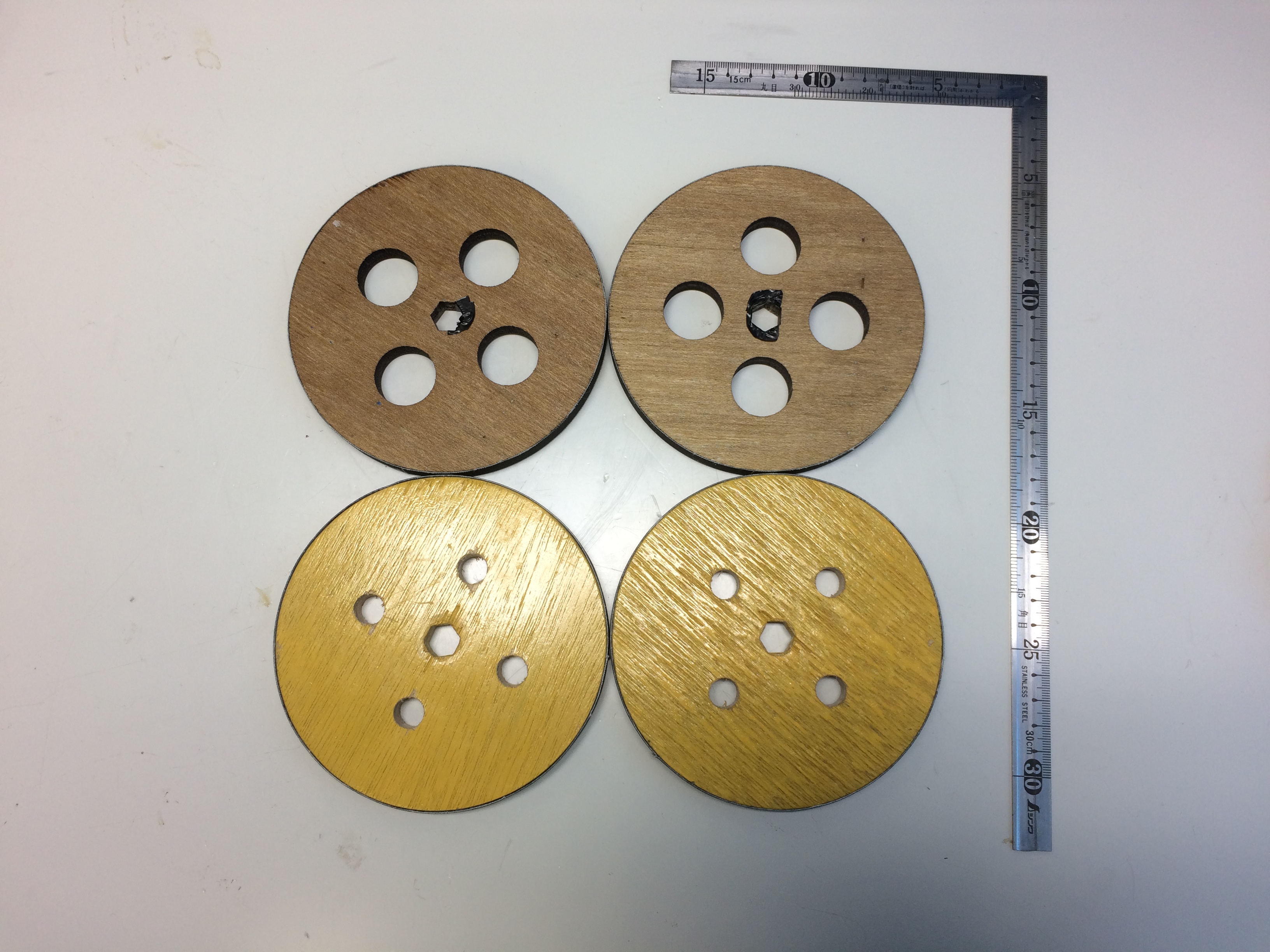
2.3木製タイヤ
木製タイヤを示す。教育研究支援センターのレーザー加工機を利用して製作した。大きさは直径132mmとなっている。昨年度以前に作成されたタイヤを予備として用いることを可能とするため、径を揃え、原材料も引き継いだタイヤの原材料であると思われるものを用いた。
写真の上にあるものが新規で作成したタイヤでしたにあるのが引継ぎ品である。また新たに布やすりを巻きつけ、トラクションを確保した。
仕様はMIRS1603 木製タイヤ詳細設計書を参照。
2.4モータマウンタ
モータマウンタを示す。教育研究支援センターのレーザー加工機とラボのボール盤を利用して製作した。大きさは縦41mm、横47mmとなっている。標準部品より剛性を高めるため、ネジ穴とモータを通す穴との距離を十分に確保した。またネジ穴同士の距離が離れたことで、モータマウンタの固定もより確実なものとなった。
モータをより確実に固定するために、モータマウンタ2つで固定した。写真の上にあるのが外側のマウンタで下にあるのが内側のマウンタである。
またこれにより、シャーシ及びフレームにかかる力を分散でき、これらの破損を防ぐことにも貢献した。 部品の詳細はMIRS1603 モータマウンタ詳細設計書を参照。

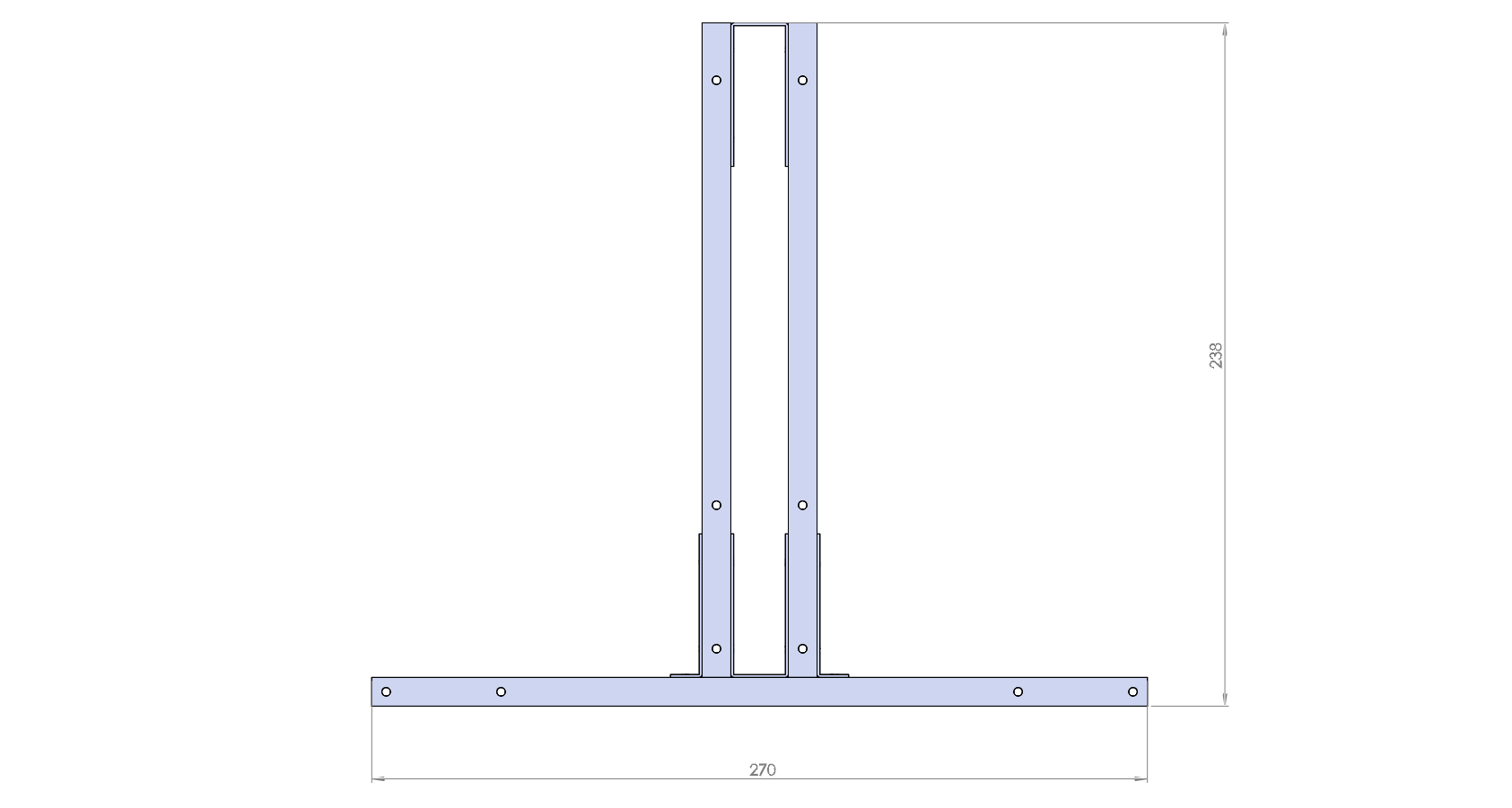
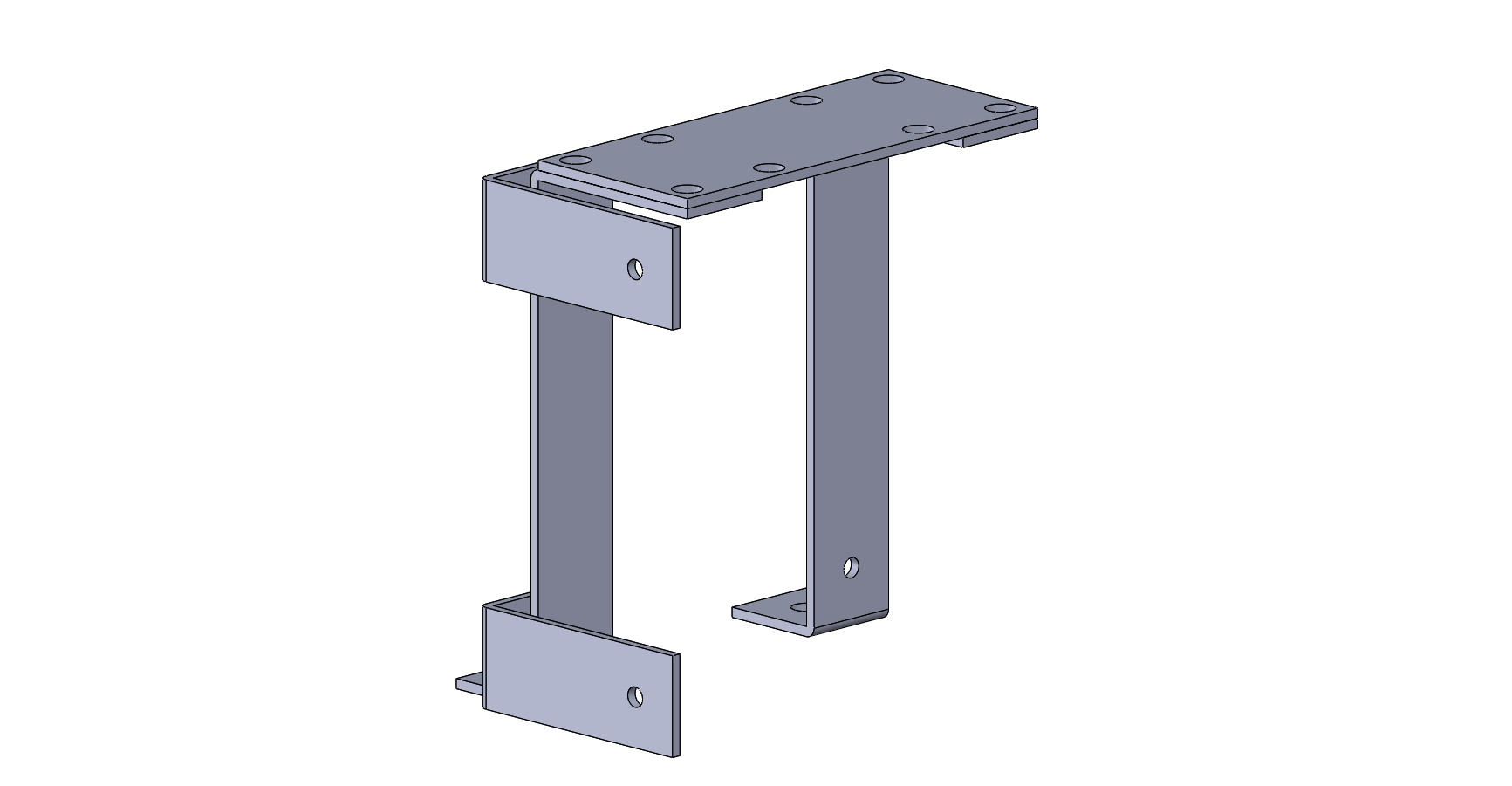
2.5センサマウンタ
センサマウンタを示す。メカニクス詳細設計書に示した図面にしたかい加工を行った。寸法のミスがあった為、サイズの変更を考慮した上で図面を修正し、加工を行った。機体の小型化に伴い、センサの取付スペースを削減するため、標準機より多くのセンサを搭載するために製作した。
アルミ板[t:1mm]を加工した部品を組み合わせ製作した。大きさは縦70mm、横30mm、高さ70mmとなっている。 組立てに用いたネジでセンサマウンタの組立も行ったため、センサを含め機体の構成部品となる。
詳細はMIRS1603 センサマウンタ詳細設計書を参照。

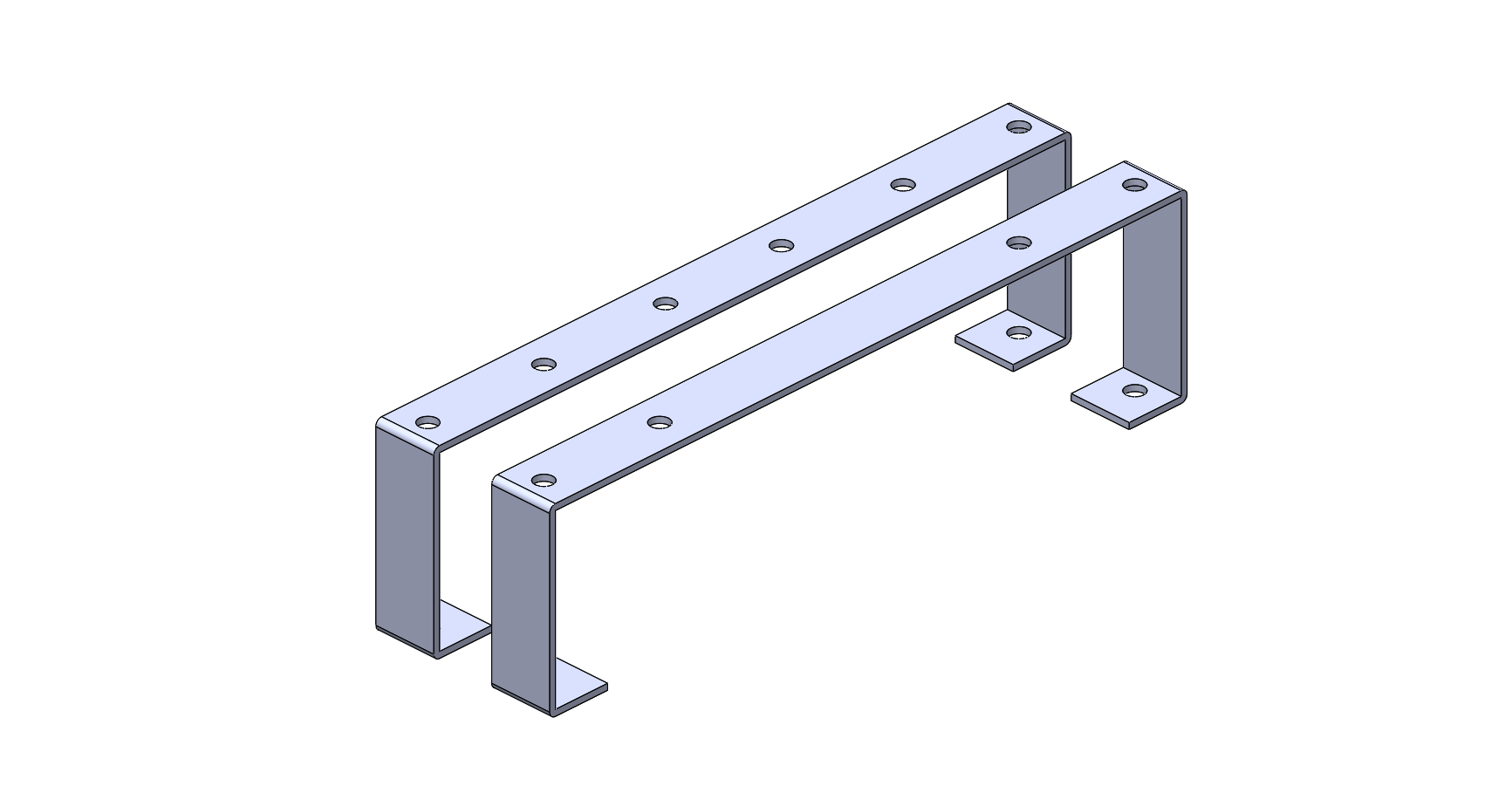
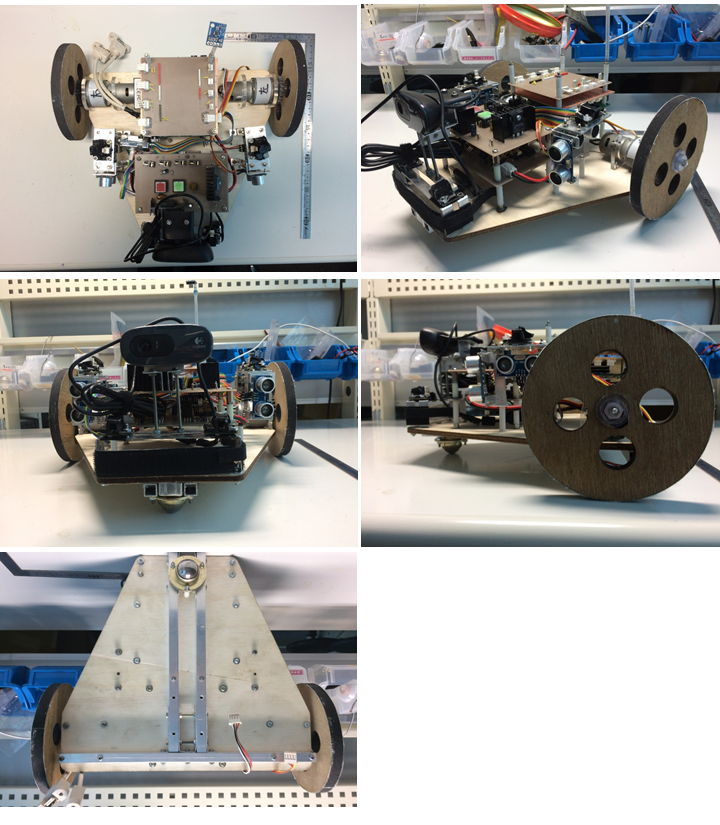
2.6カメラマウンタ
カメラマウンタを示す。バッテリを搭載するスペースを確保し、数字認識などで用いるカメラを取り付けるため製作した。標準機で用いたカメラ固定具を組み合わせることでカメラを取り付けられる(写真参照)。大きさは縦20mm、横182mm、高さ35mmとなっている。
詳細はMIRS1603 カメラマウンタ詳細設計書を参照。