| 名称 |
MIRS1603 エレクトロ二クス開発完了報告書 |
| 番号 |
MIRS1603-ELEC-0003 |
最終更新日:2017.01.26
| 版数 |
最終更新日 |
作成 |
承認 |
改訂記事 |
| A02 |
2016.02.17 |
大濱佳美,片山碧,田中哲太,永田健太 |
大林先生 |
初版 |
目次
1.本ドキュメントについて
本ドキュメントは、MIRS1603のエレクトロ二クス開発報告書についてのドキュメントである。
2.製作物一覧
MIRS1603のエレキ班の製作物を以下に示す。
3.テスト結果
各基板のテスト結果を以下に示す。
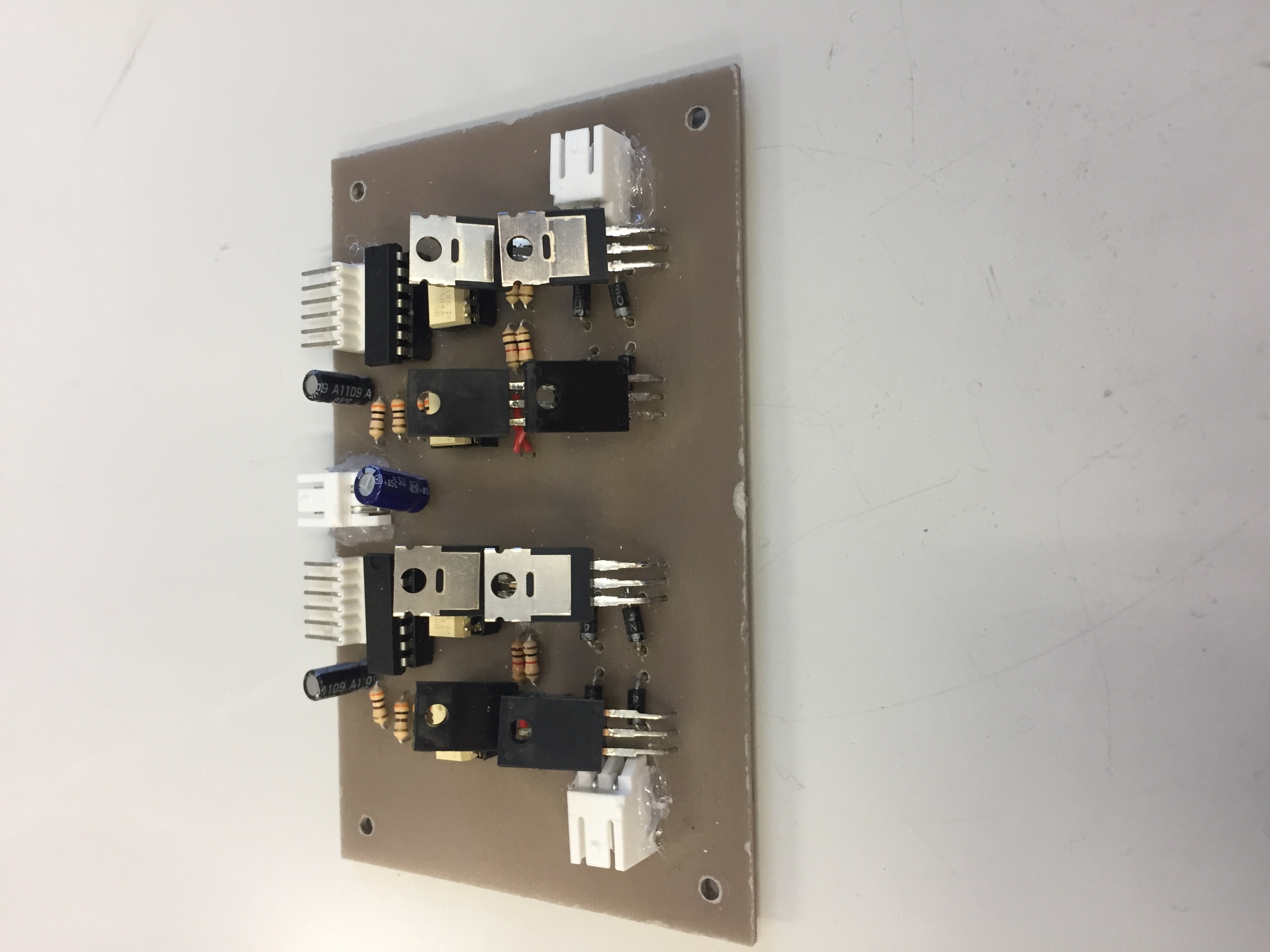
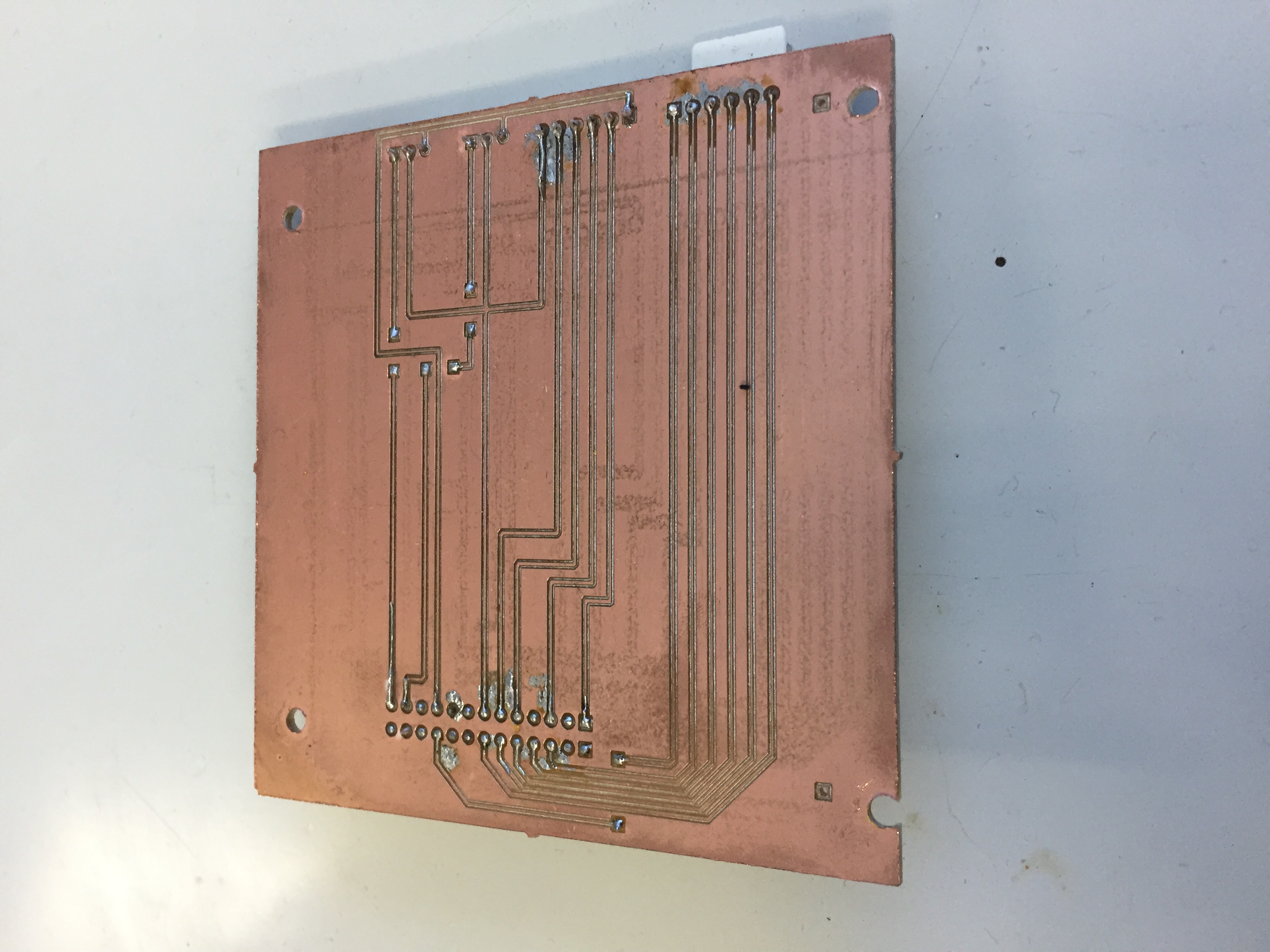
3.1 モータ制御ボード
導通チェック
すべての線において導通すべき場所がつながっているか、
またほかの場所や絶縁面と導通していないか確認し、問題がなかったので合格とした。
統合チェック
電源ボード、CPU・FPGAボード、ドータボード、モーターを接続し
PWM値を与え、モーターが正常に回ったので合格とした。
完成度
動作に関しては問題はなく、基盤の大きさもメカからのサイズ規定を満たしている。
しかし、部品のコブをはめるための穴の位置を基盤掘り出しの際に間違えてしまい、
無理やり基板を削って穴を開けたため、その部分が歪になってしまっている。
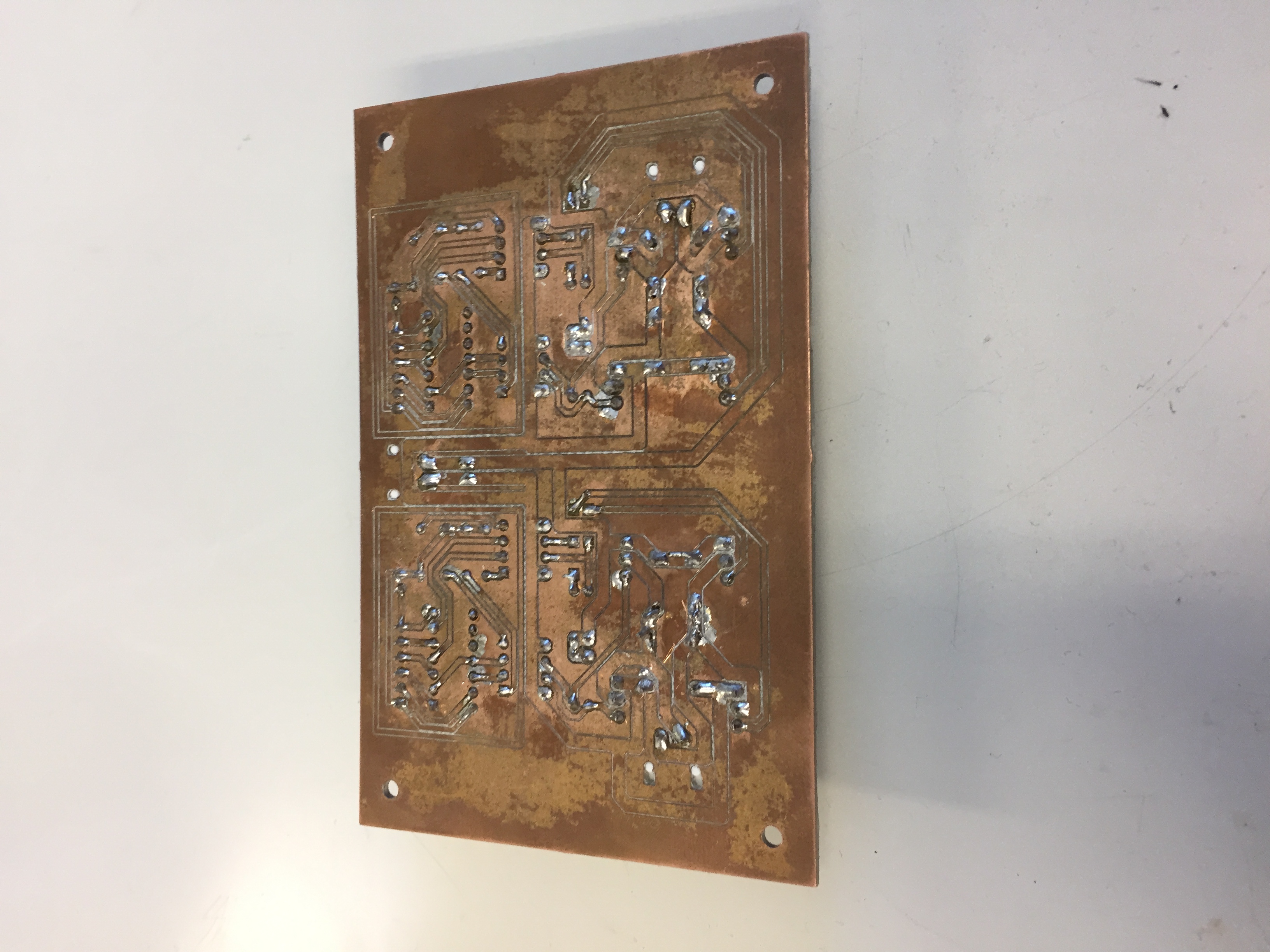
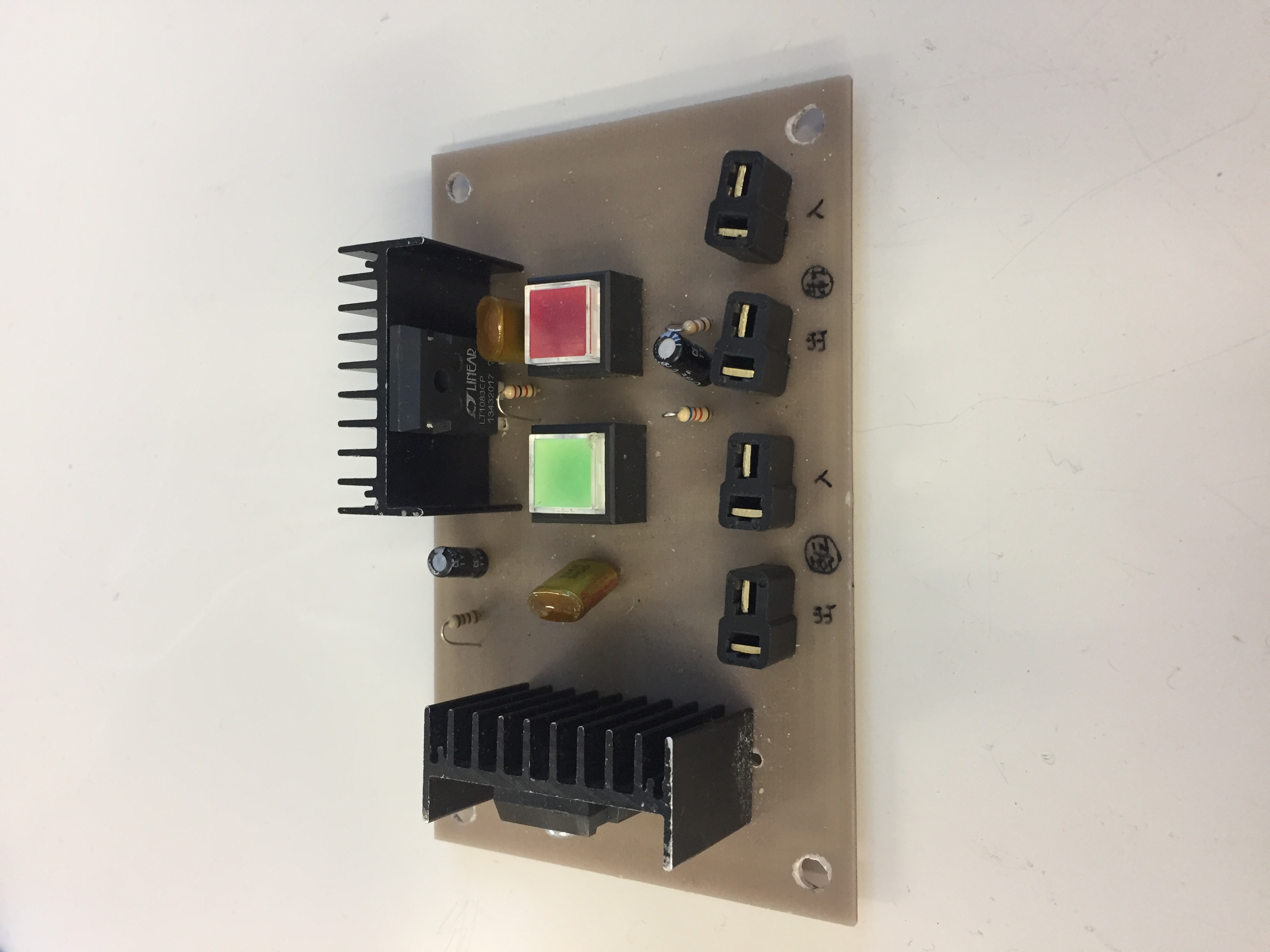
3.2 電源ボード
導通チェック
すべての線において導通、短絡のチェックを行い問題がなかったため合格とした。
統合チェック
MIRS1401 標準部品試験計画書の3.1.1動作試験を参考に、動作試験を行った。
期待通りの電圧が出ていることを確認できたので合格とした。
完成度
しっかり使えるボードを作れた。
しかし、T型コネクタの導通チェックがなかなか合格せず、何度もはんだを付け直したため、裏面が少し汚くなってしまった。
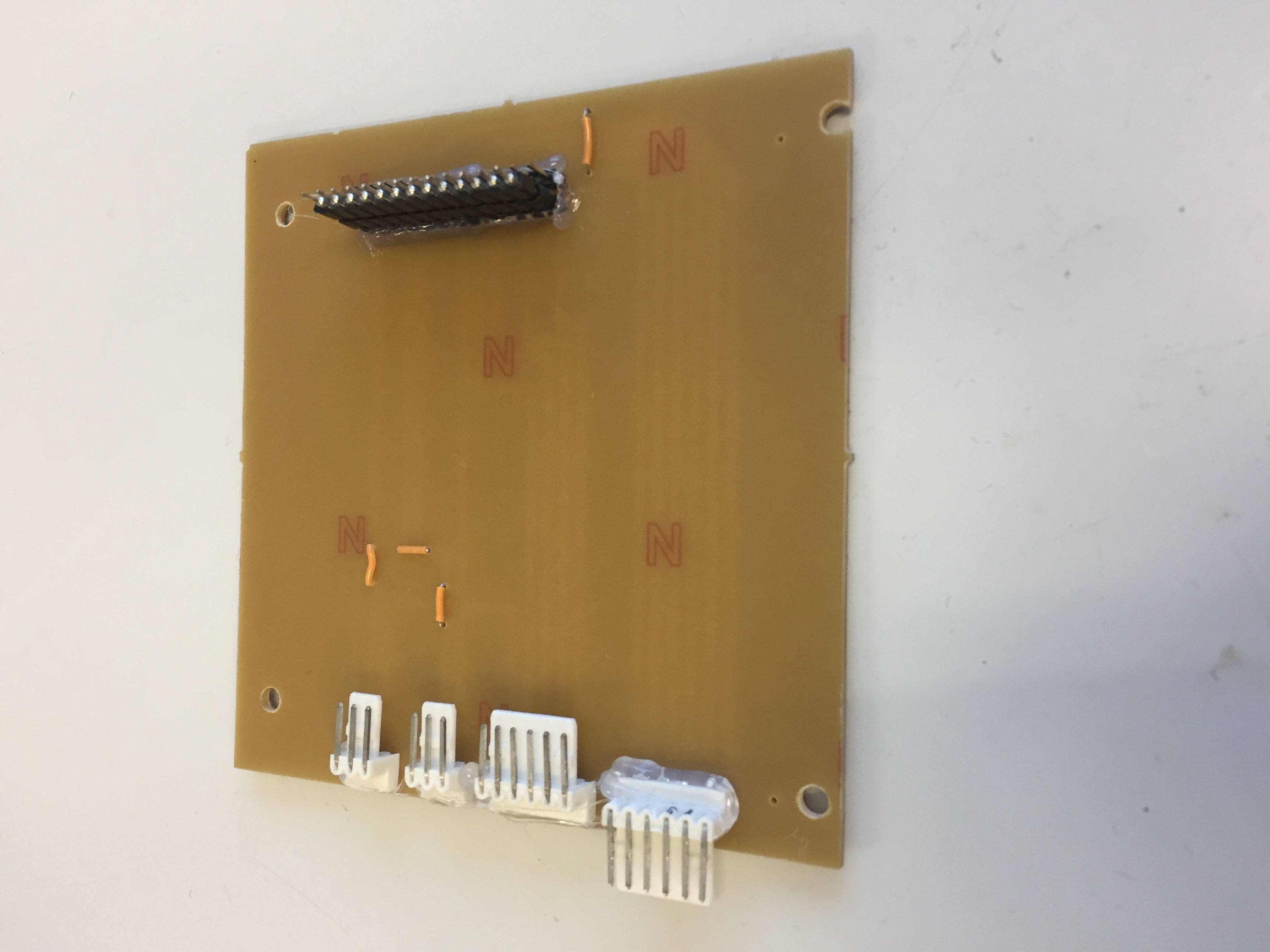
3.3 ドータボード
導通チェック
すべての線において導通、短絡のチェックを行い問題がなかったため合格とした。
統合チェック
FPGAとモーター制御ボードと接続しモーターが正常に正転、逆転したため合格とした。
完成度
はじめは、ドータボードを二段にしてメカの仕様に答えられるように設計をしたが二段のボードの接続に問題が発生したため一段のボードに作り直した。
結果としては接続がうまくいった。最終的には機体に実装後も、故障することなく動作した。二段構造でも完成させたかった。
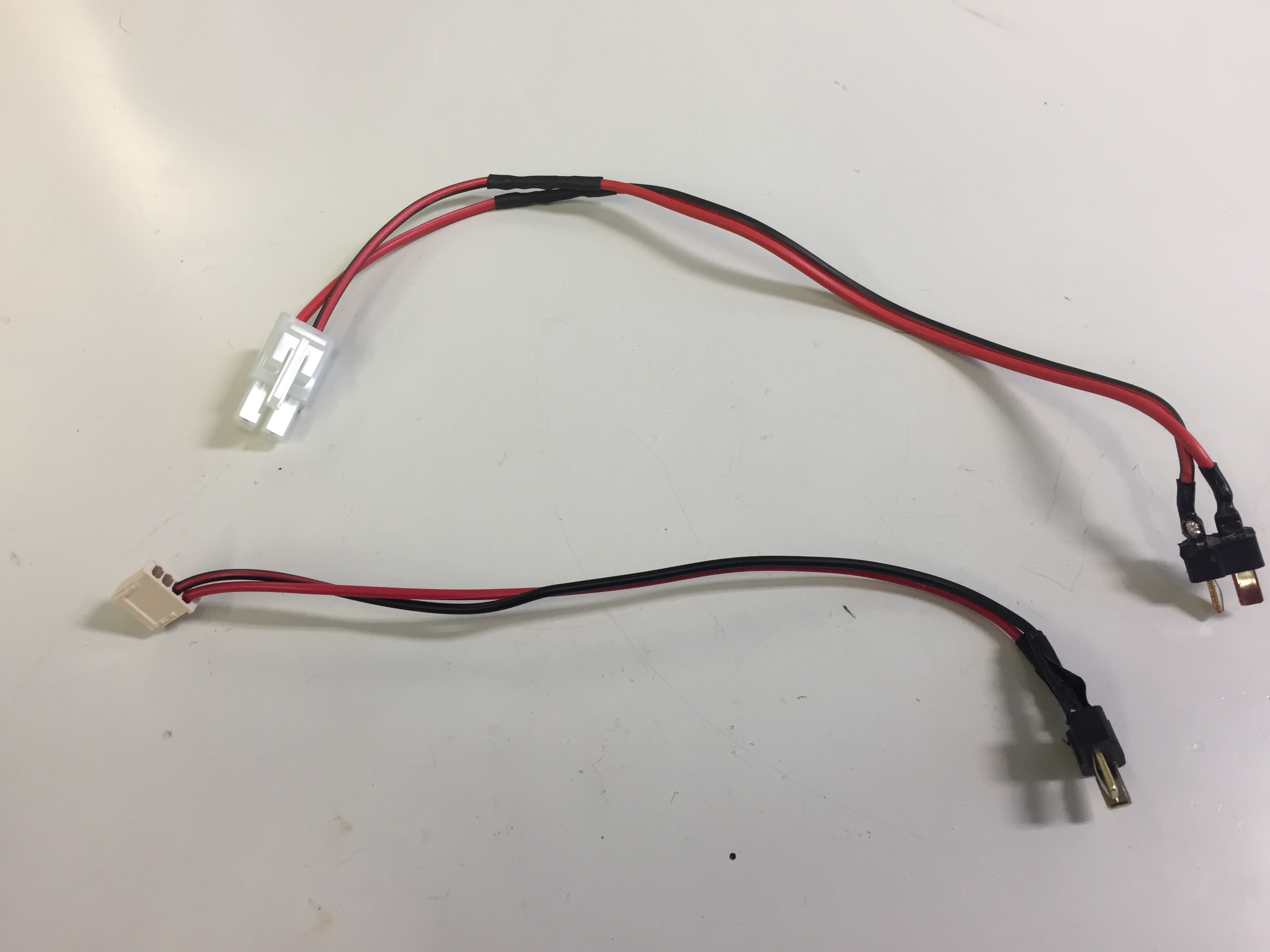
3.4 電源ボード接続用ケーブル
導通チェック
すべての線において導通、短絡のチェックを行い問題がなかったため合格とした。
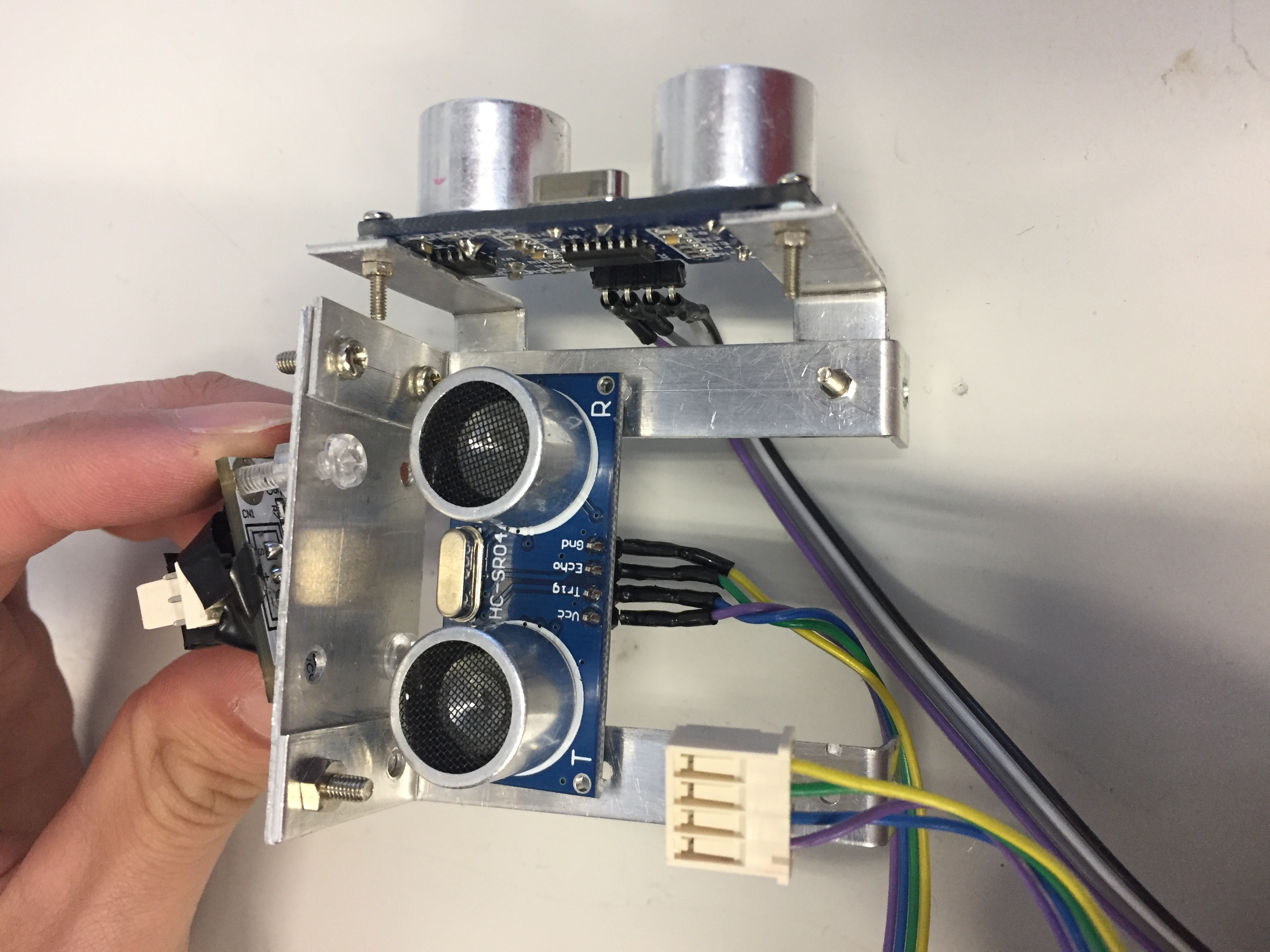
3.5 超音波センサ接続ケーブル
導通チェック
すべての線において導通、短絡のチェックを行い問題がなかったため合格とした。
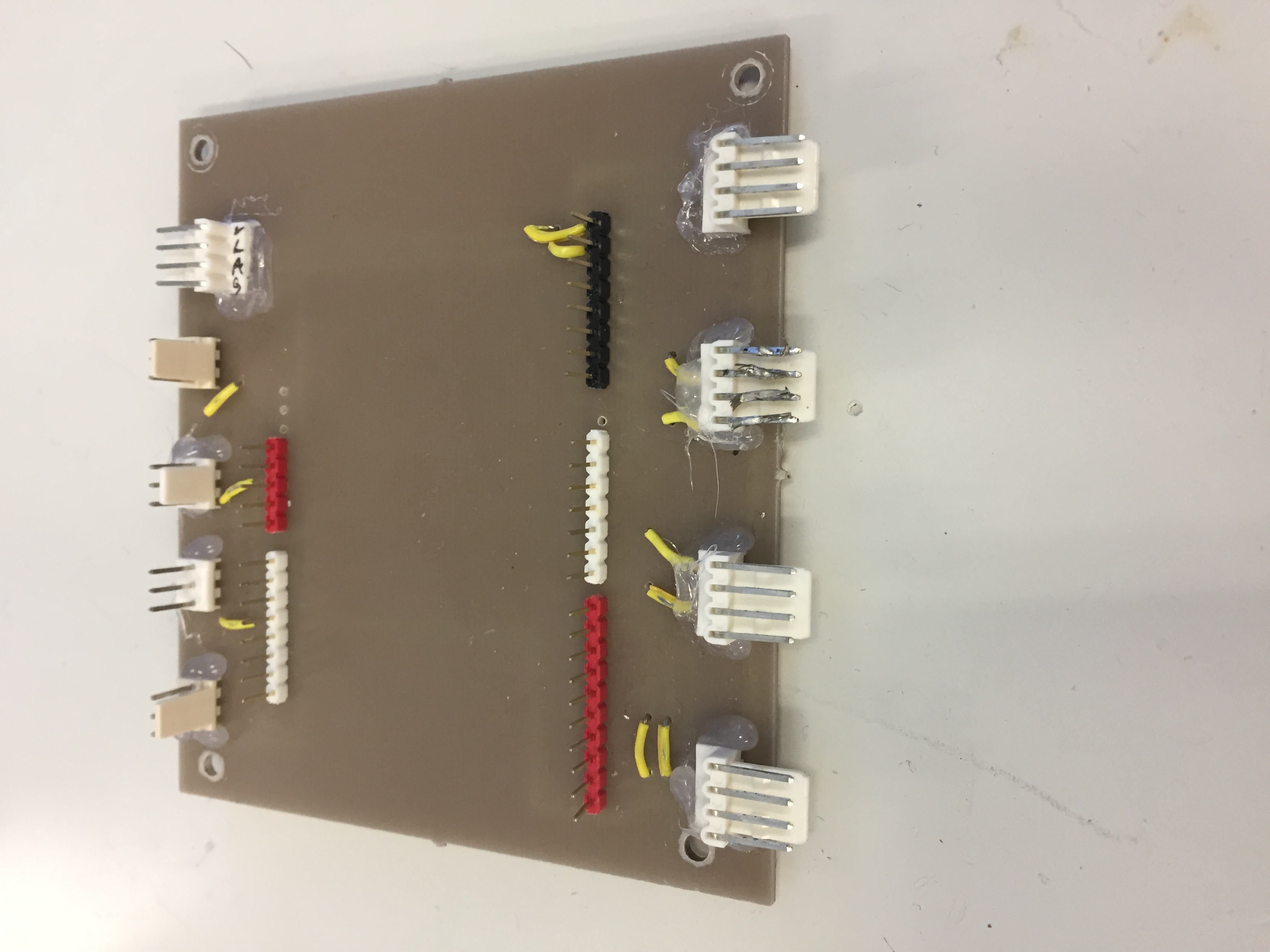
3.6 Arduino拡張基板
導通チェック
すべての線において導通し、短絡する箇所が無かったため合格とした。
統合試験
試験用のスケッチを使用して試験を行った。
超音波センサの1番ポート、赤外線センサの3番ポートにおいて値を取らないという不具合が発生した。
これは1番ポートのコネクタの接触不良が原因と考えられたため、コネクタのピンとケーブルをはんだで固定し、その上からホットボンドを流し込むことで解決した。
赤外線センサの3番ポートにおいては最終的に原因が不明のままであったため使用しなかった。
その他のポートは正常に動作し、正しい値を取ったので合格とした。
MIRS1603 Arduino拡張基板詳細設計書 5.試験方法 参照
完成度
結果的に1つのポートが使用できないままだったので、仕様を満たすことはできなかった。
また、機体へ統合する際に、ランドが剥がれてしまうことがあった。
この故障に対して、最終的に競技会まで時間がなかったことから応急処置程度の修理しかできなかったため、不安要素の残る基板となってしまった。
4.総括
スケジュールについて
作業に入るまでが遅かった。
その後、ソフト班の開発に十分な時間が取れるようにスケジュールを組んだが、
結果的には基板とpinの固定やケーブルの再製作に多くの時間を費やしてしまい、
ソフト班の作業に十分な時間を確保することができなかった。
トラブルの解決に余裕を持って取り組めるようもっと早く作業に取りかかるべきであった。
作り直しの理由
kicadや基板加工機の使い方がわかっておらず、手探りの状態で基板の加工を行っていたことに原因があると考えられる。
また、メカ班との連携がスムーズに行われておらずメカの仕様に合わせていなかったことも原因に挙げられる。
ランドが細すぎてはんだづけが難しくなっていた。
来年の学生に向けてアドバイス
・ランドは太く!!
・メカ班の仕様にあわせた基板作り
・はんだ付けは手先が器用な人にまかせよう
・後期に入ってすぐに作業に取り組もうとする姿勢(チーム全体としても)
・コネクタは信頼できない(抜き差しに向いていない)、基板を作るときはコネクタも買おう!
感想
メカの仕様、ソフトの開発どちらにも迷惑をかけてしまった。
結局ははんだづけやケーブルとコネクタの接続がエレキの問題としてはあった。
設計の部分や組み立ての部分でもっと他の班と協力できたのではないかと感じた。
チームコンセプトには近づけるような開発ができたのではないかと思う。
沼津工業高等専門学校 電子制御工学科
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}