| 名称 | MIRS1502 エレクトロニクス開発完了報告書 |
|---|---|
| 番号 | MIRS1502-ELEC-0003 |
| 版数 | 最終更新日 | 作成 | 承認 | 改訂記事 |
|---|---|---|---|---|
| A01 | 2016.02.19 | 北原一総、大川賢一郎、飯田峻也 | 初版 |
本ドキュメントは、MIRS1502のエレクトロニクス開発完了報告書である。
MIRS1502を開発するにあたり、エレキ班で製作したものをTable1に示す。
| 製作部品名 | 部品写真 | 完成度 | 設計書へのリンク |
|---|---|---|---|
| 赤外線センサ | 部品写真 | 100% | MIRS1502 エレクトロニクス詳細設計書 3.1 |
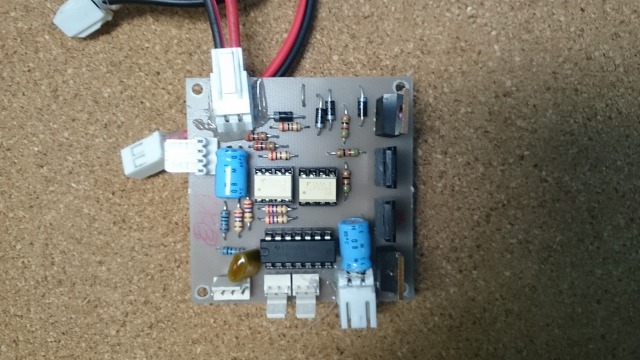
| モータ制御ボード | 部品写真 | 80% | MIRS1502 エレクトロニクス詳細設計書 3.5 |
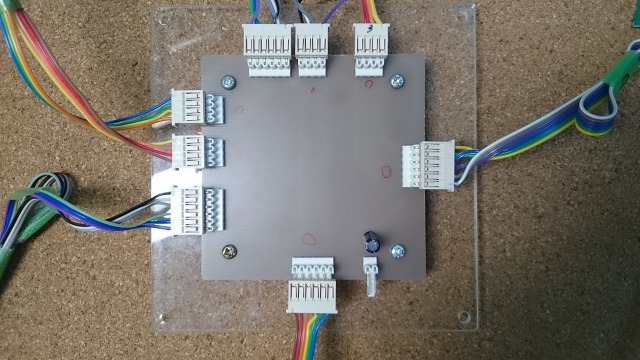
| ドーターボード | 部品写真 | 100% | MIRS1502 エレクトロニクス詳細設計書 3.6 |
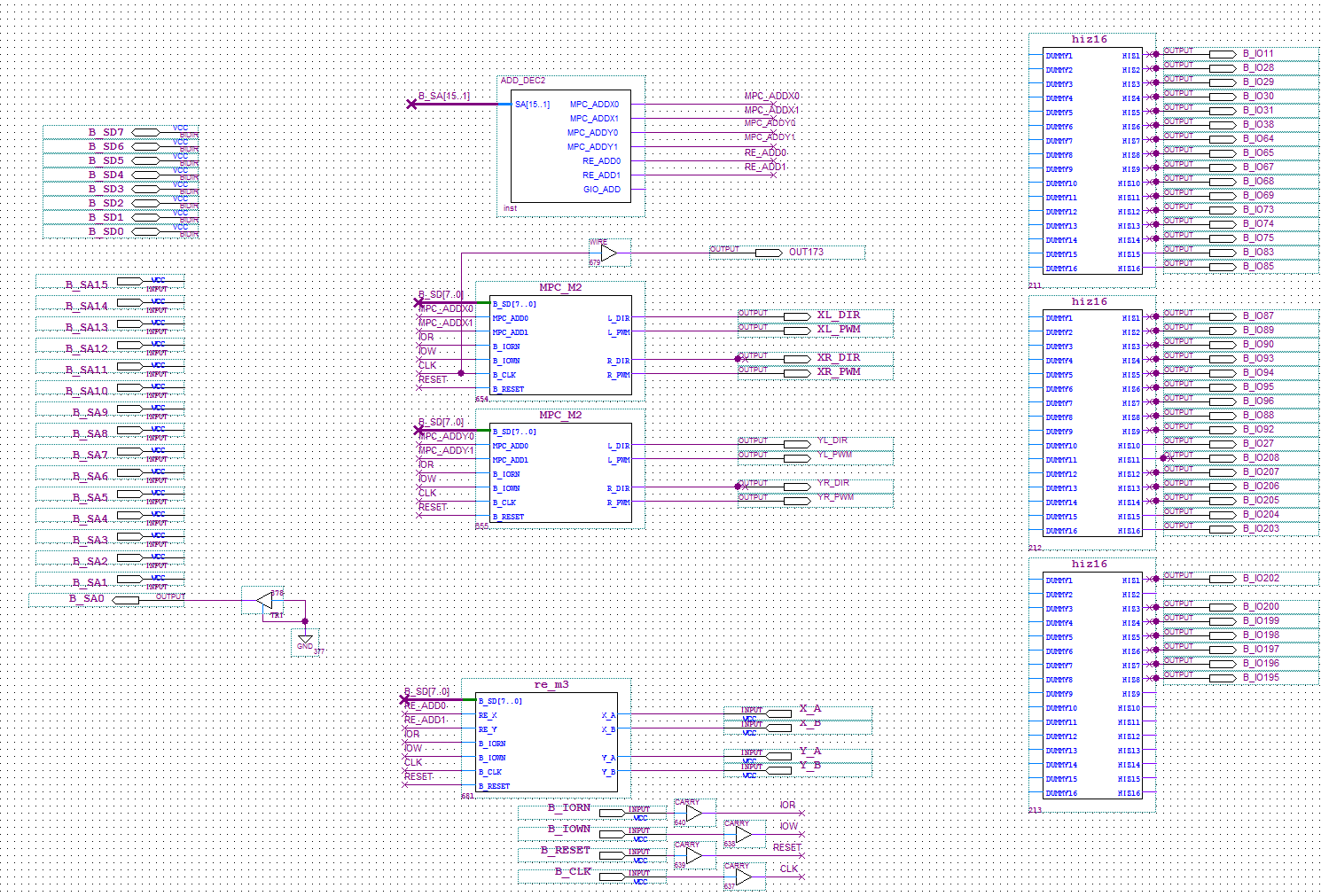
| FPGAボード | 部品写真 | 100% | MIRS1502 エレクトロニクス詳細設計書 3.4 |
| Arduinoシールド | 部品写真 | 70% | MIRS1502 Arduinoシールド詳細設計書 |
各製作物のテスト結果をTable2に示す。
| 製作部品名 | 合否 | 備考 |
|---|---|---|
| 赤外線センサ | 合格 | 1.5m程の距離まで赤外線ボールのパルス波を読み取れることを確認した。 また、Arduinoと接続し通信を行い、正常に値を読み取れることを確認した。 なお今回赤外線ボールから発せられる赤外線パルス波を捉え、太陽光などの外乱と区別するために汎用品の赤外線センサを改造したので、その手順をMIRS1502 赤外線センサ改造手順書に掲載する。 |
| モータ制御ボード | 合格 | 製作したすべてのモータ制御ボードにおいてMIRSMG3G モータ制御ボード試験仕様書に則った試験を行い、すべて正常であることを確認した。 |
| ドーターボード | 合格 | 導通テストの結果すべてのピンが導通し、意図しない短絡が発生していないことを確認した。 また、機体全体の統合試験を行い、ドーターボードが問題なく動作することを確認した。 |
| FPGAボード | 合格 | CPUから信号を送り、PWM波が正しく出力されているか確認した。 |
| Arduinoシールド | 合格 | 使用するセンサ(超音波センサ、赤外線センサ)を接続し、テストプログラムで読み込めていることを確認した。 |
エレキ班 北原
今回、エレキ班の作業が想定より長引いてしまい、ソフトウェア開発、並びに最終的な機体の調整に充てる時間が無くなってしまった。
また、時間が取れれば開発したかった電源ボードやカメラの回転機構なども開発できなかった。
要因としては
・FPGAボードへの書き込み環境が整わず、作業が止まってしまったこと
・基板加工機の不調などによりスケジュールが乱れ、班員の間での意思疎通が図れずそこでも作業がストップしたこと
・開発したボードとFPGAから発される信号がかみ合わず、その修正に時間を要してしまったこと
など、さまざまな障害によるものと考えられる。
しかし、開発したボードの利点として
・ドータ~MCB間のケーブルが単純なクロスケーブルでよい
・基板のサイズが小さく、配置の自由度が高い
・さまざまなノイズ対策設計を行っている
など、既存の回路よりグレードアップした回路を開発できたと考えている。
今回我々MIRS1502は優勝はしたものの、機体に関してはまだまだ未完成であったと言わざるを得ない。
来年度のMIRSにおいては、どうかスケジュール管理を徹底し、時には作業手順を根本から見直すレベルまで考えつつ、最終調整に余裕を持てる開発を行ってほしい。
エレキ班 大川
当初の予定では、電源ボードを除く全てのエレキパーツは2015年内に殆ど完了しているものであった。
しかしモータ制御ボード(以下MCB)をはじめとする多くの点において
当初の予定から遅れてしまい、完了したのは1月の半ばであった。
メカのパーツは疾うに作成を終えており、その中でこの遅延は「チーム全体の遅延」を招いたことと等しい。
またエレキパーツをMIRS本体に搭載した後も、新たに作ったケーブルや基板が度々「接続不良」や「FET燃焼」を巻き起こし、そのたびにテストを中断することとなった。作り方やはんだ付けが甘く、ここでもみんなの足止めをしてしまった。
思い返してみると、「エレクトロニクス詳細設計書」のレビュー通過が全班の全詳細設計書の中で一番遅かった(12月半ば)ことが一番最初の「遅延」で、そこから各々の仕事にも(予定より)多くの時間を使っていった。
それぞれのワークが遅れた理由は複数存在するが、事前に予知できたものであれば事前に相応の対応をし、予測できないアクシデントがあったとしても後から補填を加えて現状よりも「遅延」を和らげることも不可能ではなかった。また、個々のエレキ担当の動き以外にも2人でエレキの仕事を実行するというそもそもの構成にも問題はあったのかもしれない。
特に今回は、「MCBの小型化&増量」「ドータボード作り直し」など、エレキ面での標準機からの変更点が多く、これらの仕事を「2人」という少人数で捌き切るのは、簡単なプランだとは言えない。エレキ面の問題点の多くは後期に集中しているが、これについては年度初めの見通しに問題があった。
その一方で、大幅にスケジュールが遅れこんだ状況下で遅れを取り戻そうと時間を調節し、「競技会本番」までにある程度の時間を残してパーツを完成させることはできたし、最終的には、今年作成したエレキパーツが本番で異常をきたすことはなかった。
「終わりよければ全て良し」と言うならば、基板やケーブルは「(最終的に)正常の範囲内の動きをした」し、仕事は「(最終的に)終わらせて、調節のための時間もある程度確保できた」し、協議会は「怪盗機の赤外線を捉え、(一応)優勝することはできた」ので「全て良し」と言える。
しかしそこに至るまでの経緯は、とても「優勝」とは言えない程「ぞんざい」であった。「終わり」だけを「結果」だけを重要視しないで、この一連の「経緯」と「遅延」を真摯に受け止め、今回招いた「失敗」を忘れることなく、次に生かしていきたい。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}